目录
1. 时域、空域、频域
2. 低通(LPF)和高通(HPF)
3. 空域滤波算法
3.1 均值滤波(Mean Filter)
3.2 高斯滤波(Gaussian Filter)
3.3 双边滤波(Bilateral Filter)
3.4 导向滤波(Guided Filter)
3.5 中值滤波(Median Filter)
对于数字图像的处理,通常会用到各种的滤波操作,谈及滤波这个词,总会让人联想到信号处理中那一系列繁琐的转换计算公式,顿时觉得头昏脑胀。其实,若仅仅从空域来理解数字图像的滤波操作,便能够更加直观地理解整个滤波运算的过程。故此,整理了一些常用的空域滤波算法,分享给大家。
1. 时域、空域、频域
时域:考虑时间维度的计算,比如,距离D=速度V*时间T,这就是一个典型的时域问题。在数字图像领域,可以表示为I(x, y, t),即每幅图像中的像素点的数值由位置信息(x, y)和时间信息t共同决定。通常涉及到时间域的算法,大多数是用于处理视频图像的,因为视频可以看作是一系列具有时间关联性的图像的组合。
空域:仅考虑空间位置关系的计算,排除时间维度的影响。在数字图像领域,可以表示为I(x, y),即每幅图像中的像素点的数值仅由位置信息(x, y)决定。空间域的算法只会使用单幅图像本身的信息进行运算。
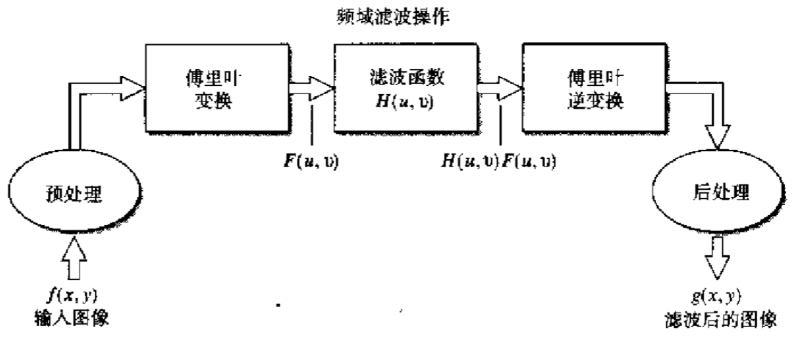
频域:由于任何信号均可分解为多个具有不同频率和振幅的正弦波,故频域便用于反映组成信号的不同频率正弦波的振幅情况。通常使用傅里叶变换将空域或时域信号转换到频域进行运算。频谱图描述了信号的频率结构以及频率与该频率信号幅度的关系。
2. 低通(LPF)和高通(HPF)
低通和高通的概念都是针对频域而言的,通过在频域中设定不同的频率点(截止频率),实现对不同频率的信号内容的过滤操作。
低通滤波器:设定截止频率,高于该频率的信号内容被滤除。
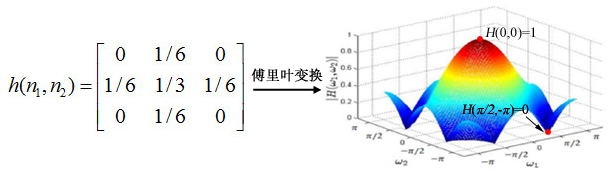
高通滤波器:设定截止频率,低于该频率的信号内容被滤除。
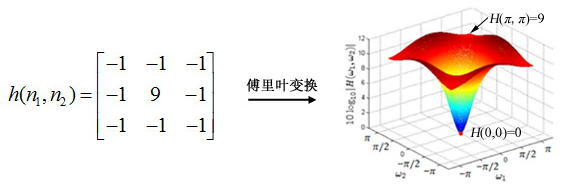
在数字图像处理领域,低通滤波器通常用于图像平滑,高通滤波器通常用于边缘提取和细节增强。
傅里叶变换详解链接:https://blog.csdn.net/jiangsgyx/article/details/90673175
上述的两幅卷积核的频域图的原文链接为:https://blog.csdn.net/iracer/article/details/49330533
3. 空域滤波算法
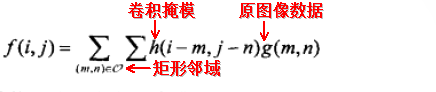
对于大多数的空域线性滤波而言,其本质上是一个加权计算的操作,可以归结为“掩模计算(Image Mask)+归一化计算(Normalize)+卷积计算(Convolution)”。
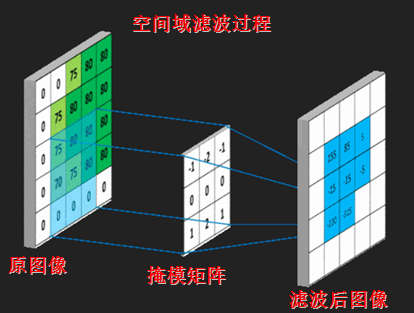
3.1 均值滤波(Mean Filter)
使用邻域像素的平均值代替当前像素值,其掩模矩阵系数均为1。
对于(2k+1)x(2k+1)的窗口模板,其滤波计算公式为:
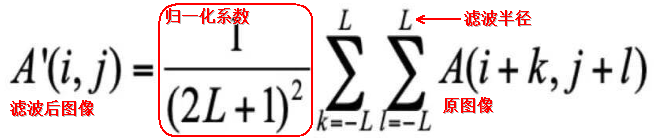
均值滤波的平滑效果与滤波半径成正比,滤波半径越大,图像越模糊。
3.2 高斯滤波(Gaussian Filter)
使用高斯函数计算掩模矩阵,对于尺寸为(2k+1)x(2k+1)的窗口模板,其掩模矩阵的系数值的计算公式为:
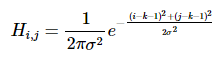
在进行掩模矩阵(3x3)的归一化处理时,将矩阵左上角的系数值作为归一化运算的分母。

高斯函数的可分离性是指使用二维矩阵变换得到的效果也可以通过在水平方向进行一维高斯矩阵变换加上垂直方向的一维高斯矩阵变换得到。
通过高斯函数计算得到的掩模系数矩阵,充分考虑到邻域像素点的点间距离的影响,距离中心点越远,其权重系数越小,从而在一定程度上起到了保护边缘细节的作用。
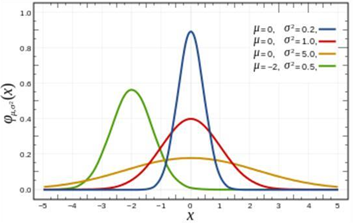
另外,由于高斯函数符合标准正态分布,因此从下图可以看出,Sigma越大,则平滑效果越强;Sigma越小,则平滑效果越弱。
详细解释请参阅:https://www.cnblogs.com/wangguchangqing/p/6407717.html
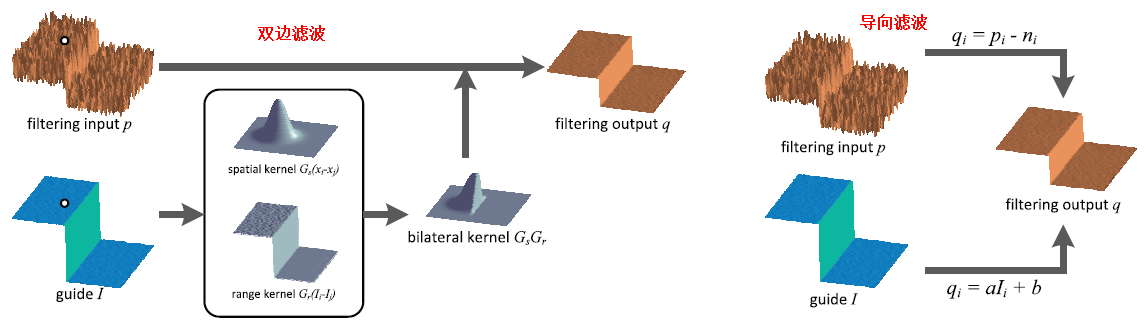
3.3 双边滤波(Bilateral Filter)
结合邻域像素点的距离因素以及相似度因素计算掩模矩阵,其掩模矩阵的系数值的计算公式为:

滤波后图像对应像素点的计算公式为:
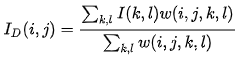
由于滤波系数由像素空间距离和灰度值相似程度共同决定,从而使得双边滤波具有更好的边缘保持特性。
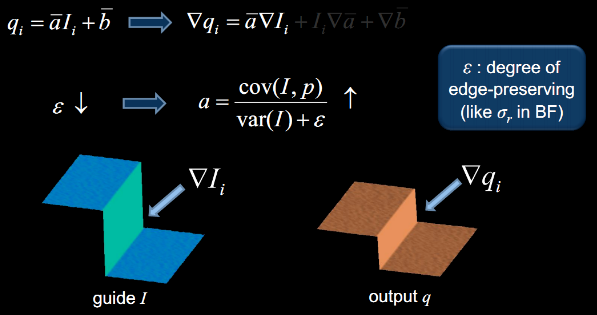
3.4 导向滤波(Guided Filter)
导向滤波是一种自适应权重线性滤波器,由下图可知,输出图像定义为输入图像去除噪声后的结果图像,同时输出图像中的梯度信息与导向图的梯度信息保持一致,导向的含义亦在于此,通过引入特定的图像梯度信息作为参考,达到保留边缘特性的目的。
公式推导细节请参阅:http://kaiminghe.com/eccv10/
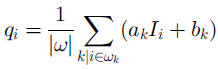
引入邻域窗口概念后,输出图像的计算如下:
![]()
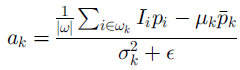
![]()
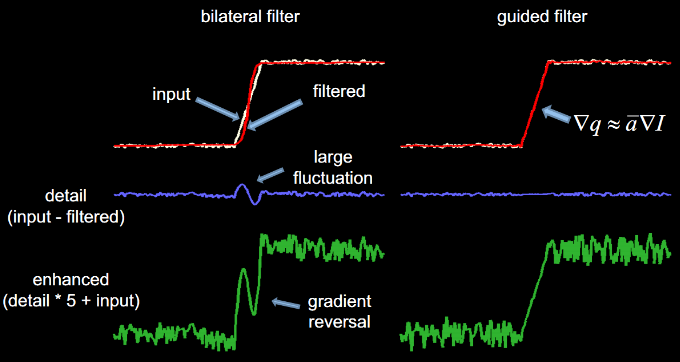
在细节增强应用中,下图展现了导向滤波的另一个特性,避免梯度翻转的情况。(导向图与输入图相同)
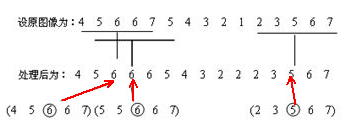
3.5 中值滤波(Median Filter)
它是一种减少边缘模糊的非线性平滑滤波方法,使用邻域像素的中值代替原像素,从而有效地消除图像上随机出现的孤立点(椒盐噪声),同时能够在一定程度上避免细节模糊。
常用的窗口有矩形、十字形、圆形和环形。
不同形状的窗口会产生不同的滤波效果。通常,矩形和圆形窗口适合处理外轮廓线较长的物体图像,而十字形窗口对于有尖顶角状的图像的处理效果较好。
矩形邻域中值滤波的主要缺点是图像中的细线和显著的角点会遭到损坏。
最后
以上就是孤独啤酒最近收集整理的关于【数字图像处理】经典空域滤波算法1. 时域、空域、频域2. 低通(LPF)和高通(HPF)3. 空域滤波算法的全部内容,更多相关【数字图像处理】经典空域滤波算法1.内容请搜索靠谱客的其他文章。








发表评论 取消回复