目录
研究
飞机、飞行管理系统和天气模型
自适应轨迹预测技术
阈下控制
解冲突
基于目标窗口的空中交通管理
空中交通管制(ATC)的首要任务是保障空域内飞机之间的安全间隔。空中交通管制目前在很大程度上是一个“人在回路”的过程,空中交通管制员最终负责运行安全。我们在这一领域的研究目的是通过引入自动化和决策支持工具,以建模、估计、分布式控制和优化方法为基础,促进人类管制员的工作。

尽管随着技术进步,空中交通管理系统在很大程度上仍然是围绕着一个结构僵化的空域和一个主要由人操作的集中式系统架构。尽管这一系统已经可靠地运行了多年,但对航空旅行日益增长的需求正开始将其容量推向极限。欧洲的航空运输量预计每10到14年翻一番;美国、亚洲和跨洋航班的增长率甚至更高。这种增长可能会在不久的将来导致安全性和性能下降,并给已经超载的人工运营人员带来额外负担。例如,工作量的增加被认为是导致1996-2000年间美国管制员失误增加33%的主要原因之一。
在现有的空中交通管理(ATM)系统中,集中式空中交通管制(ATC)是对空中交通的完全控制,并最终对安全负责。在起飞前,飞行计划将覆盖整个飞行阶段。在飞行过程中,空中交通管制根据实际交通情况向他们发出附加指令,以改善交通流量,避免遭遇危险。空中交通管制的首要任务是保持飞机之间的安全间隔。
研究内容
本研究的主要目的是通过自动化来促进空中交通管制的工作。针对这一方向,我们的研究可分为以下几个方面:
- 飞机、飞行管理系统和天气模型
- 自适应轨迹预测技术
- 潜意识控制
- 解冲突
- 基于目标窗口的空中交通管理
飞机、飞行管理系统和天气模型(Modeling of aircraft, Flight Management System and Weather)
在这方面,我们的目标是建立一个精确的模型(从空中交通管制员的角度)来模拟飞行。
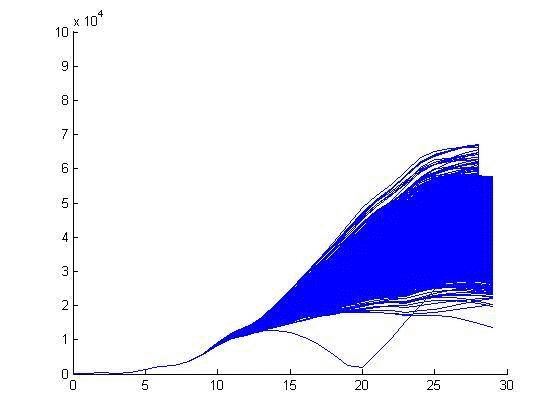
为验证轨迹预测、冲突检测和解冲突算法,开发了一个完整的模型和一个快速模拟器。我们的模型可以同时模拟多个航班。我们使用的模型是随机的和混合的。具体而言,该模型包括:
- 由飞机的物理运动产生的连续动力学。
- 由飞行计划和嵌入飞行管理系统的逻辑变量产生的离散动力学。
- 由天气和传感器噪声引起的随机动力学。
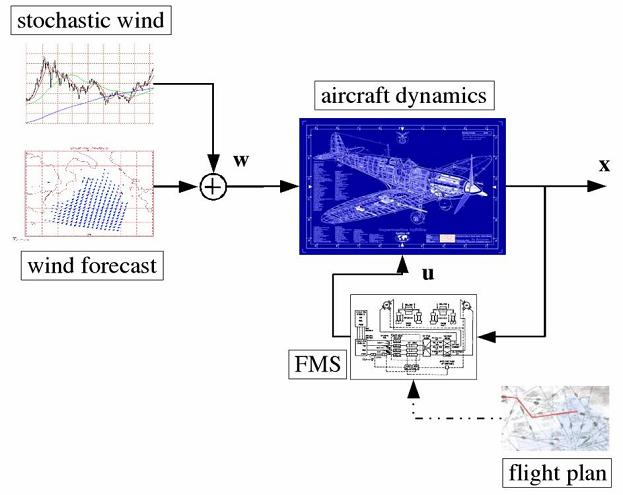
天气通过风速设置到模型中,风速由两部分组成:代表天气预报的名义风速和代表预报偏差的随机风速。假设随机分量为零均值,且时空相关。
自适应轨迹预测技术(Adaptive Trajectory Prediction Techniques)
在这一领域,发展了准确预测飞机未来位置的方法。
轨迹的特征会随着时间和环境的变化而变化。自适应技术可以在每次有新的测量值可用时通过将它们合并到当前结果中来更新和细化当前预测轨迹。它是预测问题中的概率方法,在给定所有可用信息的情况下,它为每个可能的结果指定了某种似然性。此外,这不是一个最终的预测,但总是可以在新的数据存在的情况下加以实时改进。
潜意识控制(Subliminal Control)
这是指空中交通管制员(ATCo)的不可察觉的控制,主要是为了减少ATCo的工作量。
潜意识控制是计算机辅助空中交通管理的一个新概念。前提是,空中交通管制员的大部分工作负荷使得监控可能变得不安全。自动潜意识控制系统的目的是尽早对飞机的速度进行微小的调整,以防止空中交通管制员察觉到冲突风险。这些动作必须很小,以便空中交通管制员察觉不到,然后交付一个“幸运的交通”给管制员,可以处理更多的飞机。
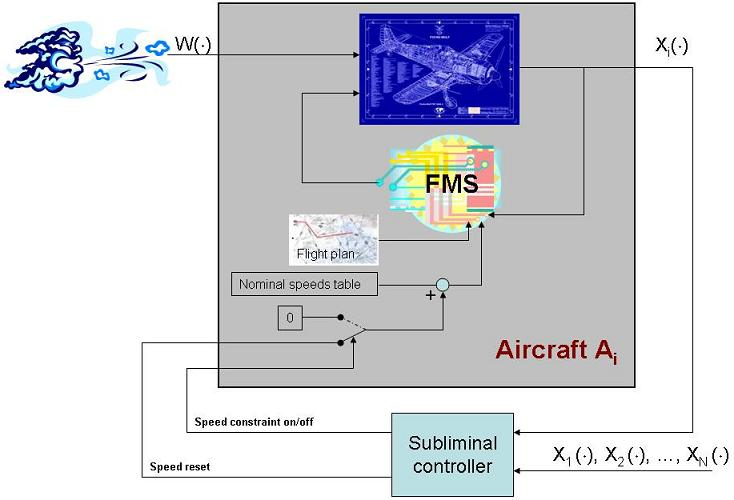
我们已经发展了一个数学框架的潜意识控制使用混合系统公式。我们的贡献有两个方面:
- 感知风险/复杂性估计:我们使用一个混合不确定系统模型来计算一个函数,该函数将风险/复杂性水平与交通状况关联到一个适当的最优控制问题值函数。
- 潜意识控制计算:我们将潜意识控制问题描述为一个鲁棒优化问题,其代价是空中交通管制员感知到的风险/复杂性。
解冲突(Conflict Resolution)
在这个领域,自动解决冲突的方法在空中交通管制得到发展。
在飞行中,飞机必须保持安全。就空中交通管制而言,这意味着飞机在整个飞行过程中必须保持大于最小的间隔。任何违反这一最小间隔的行为都被定义为冲突。
冲突解决的目标是检测即将发生的冲突,并通过改变飞行计划来解决冲突,但要受到一些限制和权限的约束。
今天,冲突的解决主要是人来实施的,由空中交通管制员操作。我们的目标是产生一个有效的自动解冲突算法,使用不同的代价标准,这取决于我们是否希望我们的控制是潜意识的。
在过去的几年里,研究确定了几种处理该问题的方法。在这一领域所作的努力可分为两个部分:
集中式解决方案:
在这种方法中,冲突检测和解决(CDR)算法必须以集中的方式(即在地面)检测和解决特定空域中所有即将发生的冲突。
分散解决方案:
这种方法通常被称为自由飞行或自主间隔保持,引入了一个不同的概念,即允许飞机在没有集中式空中交通管制系统干预的情况下在空域飞行。在这种情况下,飞机负责保持它们之间的间隔,探测并解决空域中所有迫在眉睫的冲突。这种方法虽然更为复杂,但可以预见,它将抓住未来增加航空运输的需求,因为飞机上拥有的更为准确的信息。
导航功能(navigationfunctions,NF)技术是保证移动机器人之间避免碰撞的一项强有力的技术,在机器人学中得到了广泛应用。这种方法已经在机器人领域取得了巨大的成功。不过,在空中交通管制框架中尝试使用它要复杂得多,因为飞机有额外的动态约束,比如速度约束。直接将NF方法应用于CDR会产生自由冲突轨迹,但不幸的是飞机不遵守任何操作限制。为了克服这个缺点,我们采用了模型预测控制,一种处理系统约束的技术。然而,这个公式中的一个主要困难是控制方案的难以处理,因为由此产生的优化问题是非凸的。为了克服这个问题,我们采用了随机优化技术,它可以处理复杂的系统问题,同时在一定的假设条件下可以为问题的收敛性提供一定的概率保证。到目前为止,我们使用的方法是基于模拟退火的一种变体,使用马尔可夫链蒙特卡罗(Markov Chain Monte Carlo)。
基于目标窗的空中交通管理(Air Traffic Management with Target Windows)
在这一领域,将开发跟踪“4D”约束的方法和遵守这些约束的冲突解决算法。
适应空中交通预期增长的一个主要难点是航班未来发展的不确定性。由CATS项目提出的目标窗口(TW)是在每架飞机飞行计划不同部分的扇区之间的放置空间和时间约束(图1),其位置和间隔大小反映了下游组件施加的约束,例如在目的地的准点率、连接的航路区域,或其他安全要求。它们代表了每个参与者(空中交通管制员、机场、航空公司、空中导航服务提供商)在特定约束集内交接特定飞机。
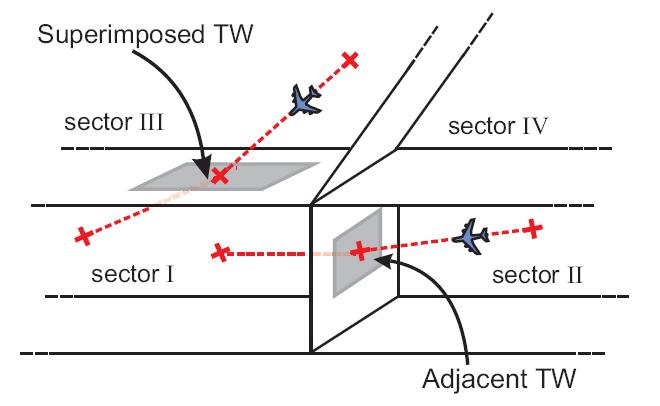
我们的目标是量化每架飞机在特定TW下的机动性自由度,并为多智能体环境下的冲突解决提供一个集中的解决方案。考虑到两架飞机的避碰情况,我们的目标是确定一架飞机可以使用的初始状态集,尽管有风也可以到达其TW,同时避免与其他飞机发生冲突。这是一个到达-避免问题,由于存在扰动,在存在风的情况下,可以将其视为一个追逃微分对策,并将其编码为一个向后可达性的计算。
这种到达-避免集可以通过适当的最优控制问题的值函数的水平集来表征。由于状态约束(避免集)也存在,值函数可以显示为拟变分不等式的唯一连续粘性解,然后可以使用基于水平集方法的计算工具来数值求解问题。
在飞机能够很好地横向跟踪的合理假设下,我们目前的目标是:
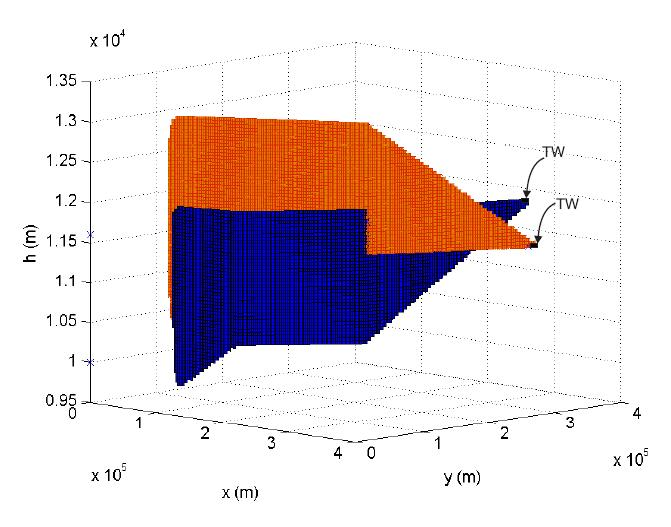
- a) 确定每个TW的后向可达通道,构建相应飞机的机动性自由度。(图2)。
- b) 执行冲突检测,即确定可能发生冲突的区域(图2)。
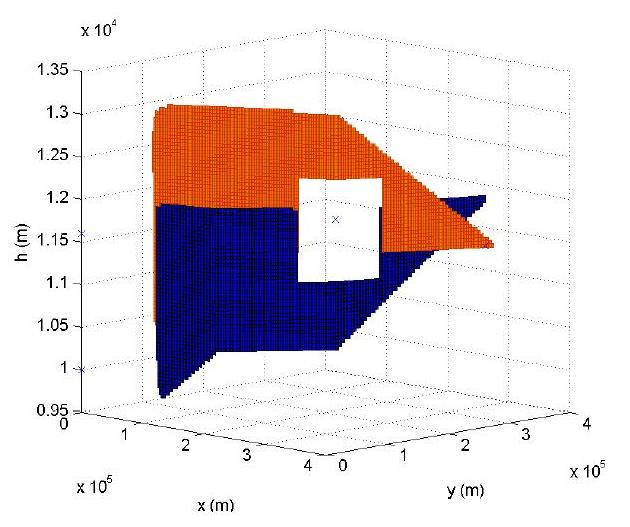
- c) 应用我们的到达-避免方法来构建无冲突的飞行通道(图3)。
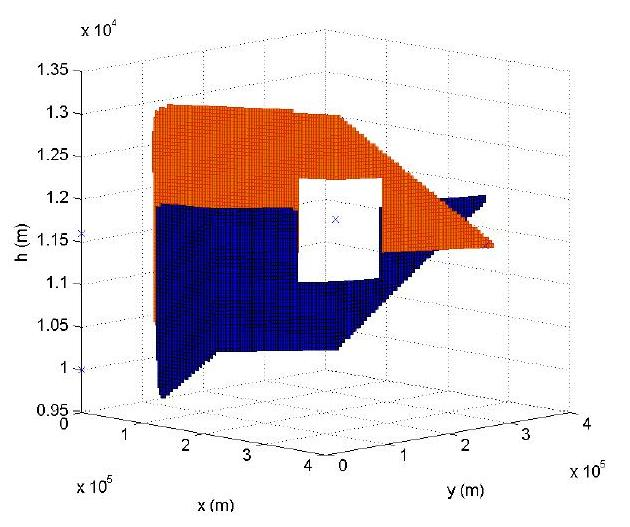
通道中的所有点都表示飞机可以在某个时间启动并到达TW的状态。下一步将使用从到达-避免计算中获得的边界,通过优化某些代价标准来执行冲突解决,并通过使用真实飞机、飞行计划、飞行管理系统和风不确定性的快速仿真研究来验证这些方法。
最后
以上就是还单身含羞草最近收集整理的关于空中交通管制研究内容的全部内容,更多相关空中交通管制研究内容内容请搜索靠谱客的其他文章。








发表评论 取消回复