Pure Pursuit(纯追踪算法)ROS实践
一、背景知识
自主移动机器人,或者说无人驾驶车辆,一般有三大子系统
-
环境感知子系统(Perception)
无人驾驶车辆通过传感器来获取环境信息,主要包括环境感知、建图、定位等。
-
行为决策子系统(Planning)
结合导航目标、环境信息、交通规则等信息规划出一条精密的行驶轨迹,无人车沿着这条轨迹移动就能到达终点。
-
运动控制子系统(Control)
结合行为决策子系统规划的轨迹和车辆当前状态,位置、姿态和速度等,得出无人车的控制量,油门、档位、转向等。
二、Pure Pursuit算法
首先感性的去认识一下纯追踪算法,简单理解就是,无人车关注轨迹中某个点目标goal,然后去追踪它。
在无人地面载具(UGV)场景下,这里的goal是Planning子系统所规划轨迹上的一些点,称为路点(Way Points)。如果轨迹是连续的,就在轨迹上采样多个点。如果轨迹是离散的,那么就可以直接使用。
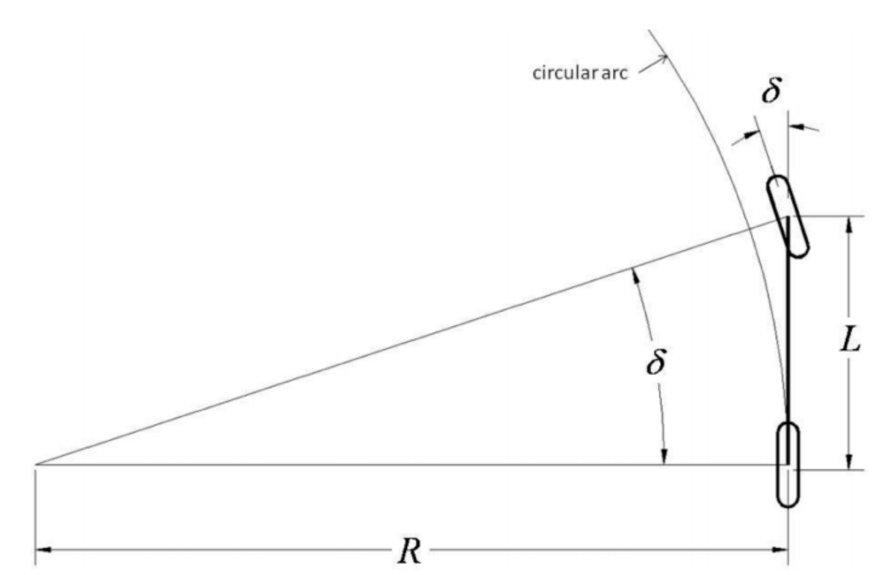
上图是一个自行车模型,接下来简单说明是怎么绘制的。车辆坐标原点在后轴中心,如果转向角δ确定以后,车辆会以某个圆心做一个转圈动作,这个圆的半径就是R。那么pure pursuit算法就是一个横向控制器,通过计算转向角δ来控制车辆,使得车辆后轴中心能沿着轨迹移动。
各变量含义如下:
δ
:
前
轮
的
转
向
角
(
度
)
L
:
轴
距
(
米
)
R
:
给
定
转
向
角
后
,
车
后
轴
中
心
遵
循
的
圆
的
半
径
begin{aligned} & delta:前轮的转向角(度)\ & L:轴距(米)\ & R:给定转向角后,车后轴中心遵循的圆的半径 end{aligned}
δ:前轮的转向角(度)L:轴距(米)R:给定转向角后,车后轴中心遵循的圆的半径
根据图中关系可得
t
a
n
(
δ
)
=
L
R
(1)
tan(delta)= frac{L}{R} tag{1}
tan(δ)=RL(1)
(1)式的δ是我们要求的转向角,而未知量式R。由于曲率k与半径R呈倒数关系可将(1)式改写为
δ
=
t
a
n
−
1
(
k
L
)
(2)
delta = tan^{-1}(kL) tag{2}
δ=tan−1(kL)(2)
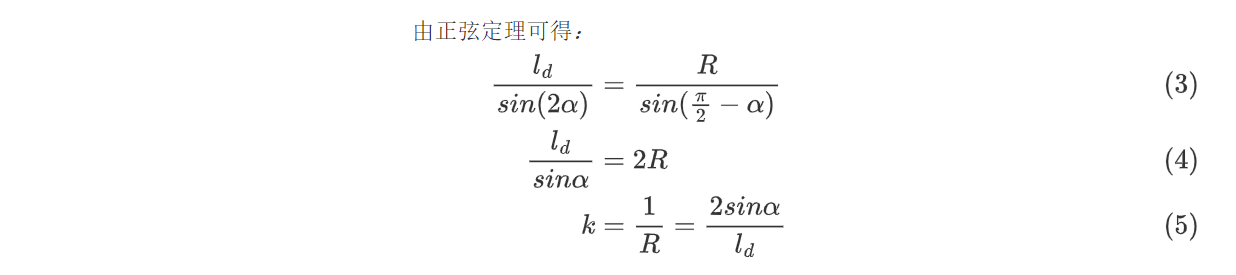
这时求解δ就成为了,解等式右边式子,其中L已知,是车辆的轴距,未知量是曲率k。接下来我们就来求解这个k。
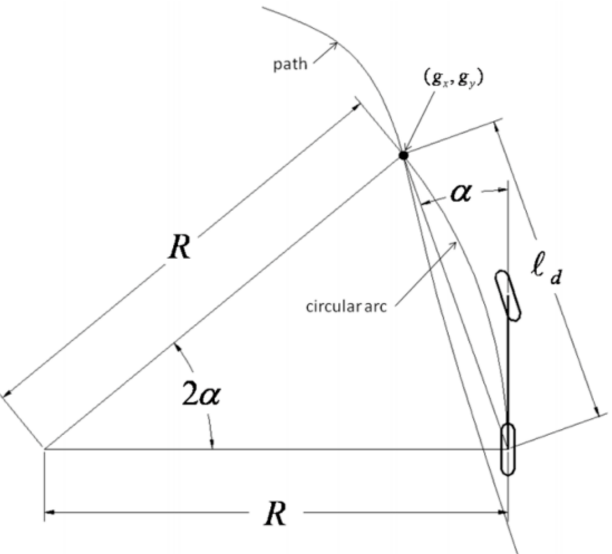
上图便是pure pursuit算法的几何图形,简单说明一下怎么绘制的。其中点g是我们的目标路点,我们要确定转向角δ(注意,不是图中的α),使后轴中心遵循的圆弧能经过g。再次强调,我们要求是圆弧的半径R,或者说曲率k,上图中的未知量只有R
各变量含义如下
(
g
x
,
g
y
)
:
目
标
路
点
g
在
车
辆
坐
标
系
中
的
位
置
(
即
G
P
S
路
径
中
采
样
的
轨
迹
点
)
。
α
:
车
后
轴
与
目
标
路
点
g
连
成
向
量
与
车
偏
航
角
夹
角
。
l
d
:
前
视
距
离
。
begin{aligned} & (g_x,g_y):目标路点g在车辆坐标系中的位置(即GPS路径中采样的轨迹点)。\ & α:车后轴与目标路点g连成向量与车偏航角夹角。\ & l_d:前视距离。 end{aligned}
(gx,gy):目标路点g在车辆坐标系中的位置(即GPS路径中采样的轨迹点)。α:车后轴与目标路点g连成向量与车偏航角夹角。ld:前视距离。
接下来推导怎么求曲率k
考虑时间t,可以将(2)式表示为
δ
(
t
)
=
t
a
n
−
1
(
k
(
t
)
L
)
=
t
a
n
−
1
(
2
L
s
i
n
(
α
(
t
)
)
l
d
)
(6)
delta(t) = tan^{-1}(k(t)L) = tan^{-1}(frac{2Lsin(alpha(t))}{l_d}) tag{6}
δ(t)=tan−1(k(t)L)=tan−1(ld2Lsin(α(t)))(6)
至此,pure pursuit算法就变成了每一个时刻求解α。
三、基于GPS定位在ROS上实现
实验平台使用的GPS+惯导套件能提供8位小数精度的定位和偏航角。实验流程是先记录下人工控制移动的GPS轨迹,然后让无人车利用pure pursuit算法去跟随该轨迹移动。
在实现过程中有几个问题需要注意:
-
根据两个GPS坐标计算距离
如何计算两个GPS点的距离,因为原始算法是以车辆坐标系(笛卡尔坐标系,单位是米)定位每个点的,所以可以直接用欧几里得距离公式求距离,而GPS坐标不是以车辆坐标系定位点,要用到专门的算法求距离。
我们要找到目标路点g,算法过程如下:
(1)找到轨迹上离车后轴中心最近的路点o。
(2)以o为起始位置,遍历之后的路点,将相邻两个路点比如第i,i+1两个点的距离累加到L,直到累加距离L大于前视距离Ld,即找到目标路点g。
刚开始我尝试用近似的方法求解,但是因为距离较小,近似求解误差很大,需要做到很精确的算法,代码网上能查到就不放了。
-
根据两个GPS坐标计算航向角
计算α角时需要计算从车当前后轴中心坐标到目标路点g的偏航角(相对真北的角度)。同上面的问题一样也是因为原始代码是用的车辆坐标系(笛卡尔坐标系),可以用三角函数求得偏航角。而GPS坐标求解不能用三角函数求解,这时也需要求精确的值,代码网上能查到就不放了。
-
弧度与角度的转换
数学库里面三角函数sin,cos,tan,atan等函数都是使用的弧度计算,在GPS计算和车辆控制都是用角度计算,在实现pure pursuit算法步骤中要注意弧度和角度的转换。
最后
以上就是隐形大侠最近收集整理的关于Pure Pursuit(纯追踪算法)ROS实践Pure Pursuit(纯追踪算法)ROS实践的全部内容,更多相关Pure内容请搜索靠谱客的其他文章。








发表评论 取消回复