平台:Rockchip rk3288 OS:Ubuntu16.04
GPS 通过 uart1 与 cpu 进行通讯 ,设备树打开 uart1,配置 gps 使能和复位引脚即可 。(默认GPS打开)
/{
misc_control {
status = "okay";
compatible = "rockchip";
pinctrl-names = "default";
pinctrl-0 = <&gps_en>, <gps_rst>;
gps-en = <&gpio7 RK_PB7 GPIO_ACTIVE_LOW>;
gps-rst = <&gpio7 RK_PA3 GPIO_ACTIVE_HIGH>;
};
};
misc_control {
gps_en: gps-en-gpios {
rockchip,pins = <7 RK_PB7 RK_FUNC_GPIO &pcfg_pull_down>;
};
gps_rst: gps-rst-gpios {
rockchip,pins = <7 RK_PA3 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
uart1 {
status = "okay";
};- 查看gps状态 cat /dev/ttyS1 可以看到串口向cpu传输即时数据
- 安装 GPS 服务软件 sudo apt-get install gpsd gpsd-clients
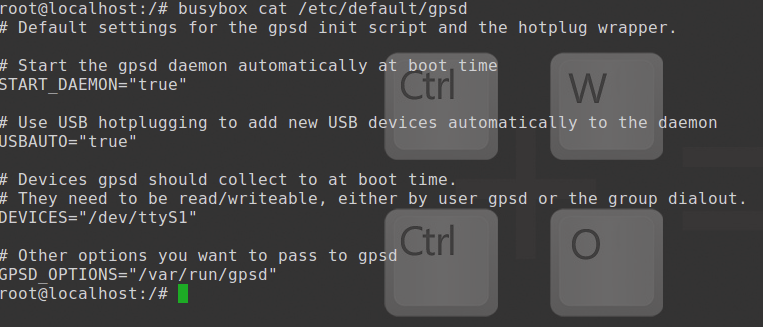
- busybox vim /etc/default/gpsd 配置 gps 参数
- sudo service gpsd restart 重启gps服务
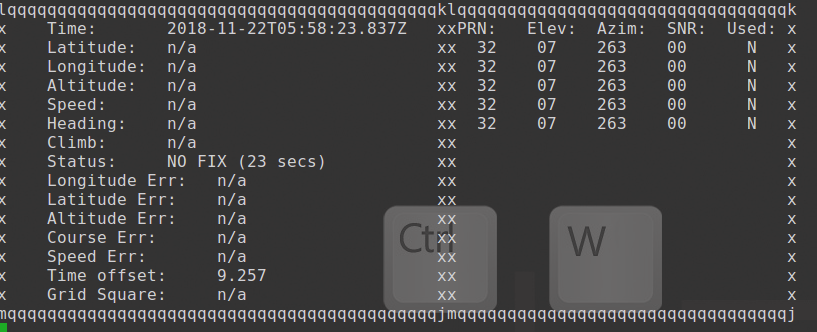
- cgps -s 查看gps状态
目前调试GPS到此,只提供底层通讯接口 /dev/ttyS1 ,后续有更深的理解会继续更新.....
最后
以上就是拼搏大门最近收集整理的关于RK3288 Ubuntu16.04 ---- GPS 调试的全部内容,更多相关RK3288内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复