一 项目背景
项目需要使用一款UART串口编码器,编码器的数据以波特率57600持续向外发送。但这组数据包没有固定的包头和校验尾,仅仅是由多圈圈数和单圈角度组成的六字节数据码,这样接收到的数组无法确定实际的下标,所以这边考虑用串口接收超时中断+DMA来实现。
二 原理说明
【1】UART原理说明:参考【嵌入式】NXP/LPC使用GPIO+定时器模拟UART串口接收
【2】超时中断原理说明:接收的数据包通过逻辑分析仪,如下所示:

由上面的数据可以看到,两个包之间的发送间隔为500us左右,而一个包的发送时间为170us(波特率为57600,那么每位数据是17us,一个包10位数据,就是170us),所以只要在串口收发的过程中加一个定时器,设定超时时间为400us(大于170us,小于500us即可),那么 只要超时了,说明下一次收到的位即为起始位。
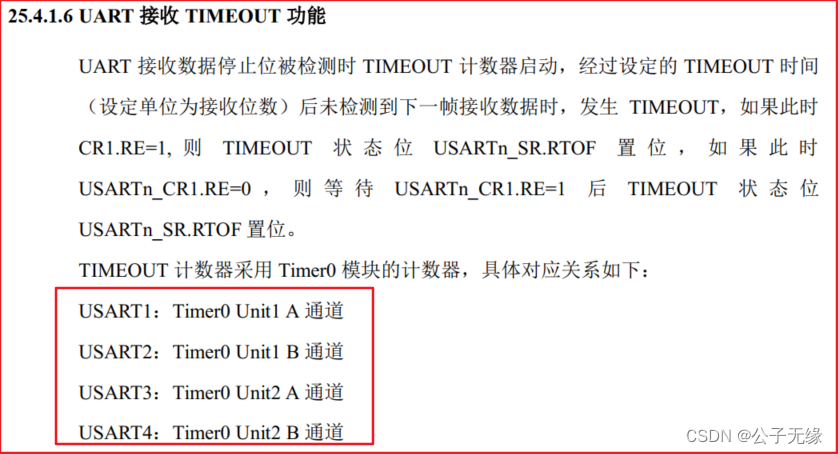
STM32中有一个空闲中断(IDLE)的概念,而HC32中没有,取而代之的是串口接收超时中断,两者基本功能是类似的,都是在串口超过一段时间没有接收数据之后触发的一个中断功能。HC32F460的用户手册中对此也有详细说明(我们这边用的是USART4串口,所以相对应的需需要使用 Timer0 Unit2 B 通道):
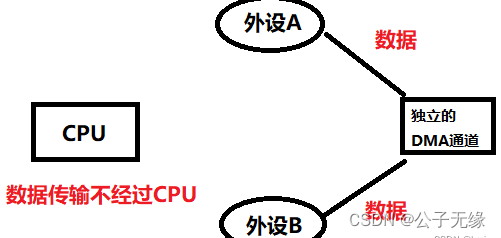
【3】DMA原理说明:DMA(Direct Memory Access,直接存储器访问) 是单片机的一个外设,它的主要功能是用来搬移数据,但是不需要占用 CPU,即在传输数据的时候, CPU 可以干其他的事情,好像多线程一样。(具体可以参考:串口DMA传输模式)
这边用到DMA,是因为编码器发送数据比较快,若是一直进中断会挤占CPU的资源,所以考虑用DMA改进。
三 设计实现--超时定时器部分
【1】超时定时器初始化( Timer0 Unit2 B 通道 ),这个过程中主要关注一下定时器时间的设置,如下面的 stcTimerCfg.Tim0_CmpValue = 4200 ,它的时钟源是 Tim0_Pclk1 ,在HC32F460中,这个时钟是168MHz的一半,即84MHz,时钟的分频系数为8,根据公式:
T=CmpValue*ClockSource*ClockDivision
其中,T = 400us,ClockSource=1/84MHz,ClockDivision=8,计算出CmpValue=4200:
void Timer0_Config(void)
{
stc_clk_freq_t stcClkTmp;
stc_tim0_base_init_t stcTimerCfg;
stc_tim0_trigger_init_t StcTimer0TrigInit;
MEM_ZERO_STRUCT(stcClkTmp);
MEM_ZERO_STRUCT(stcTimerCfg);
MEM_ZERO_STRUCT(StcTimer0TrigInit);
/* Timer0 peripheral enable */
PWC_Fcg2PeriphClockCmd(PWC_FCG2_PERIPH_TIM02, Enable);
/* Clear CNTAR register for channel B */
TIMER0_WriteCntReg(M4_TMR02, Tim0_ChannelB, 0u);
/* Config register for channel B */
stcTimerCfg.Tim0_CounterMode = Tim0_Sync;
stcTimerCfg.Tim0_SyncClockSource = Tim0_Pclk1;
stcTimerCfg.Tim0_ClockDivision = Tim0_ClkDiv8;
stcTimerCfg.Tim0_CmpValue = 4200;
TIMER0_BaseInit(M4_TMR02, Tim0_ChannelB, &stcTimerCfg);
/* Clear compare flag */
TIMER0_ClearFlag(M4_TMR02, Tim0_ChannelB);
/* Config timer0 hardware trigger */
StcTimer0TrigInit.Tim0_InTrigEnable = false;
StcTimer0TrigInit.Tim0_InTrigClear = true;
StcTimer0TrigInit.Tim0_InTrigStart = true;
StcTimer0TrigInit.Tim0_InTrigStop = false;
TIMER0_HardTriggerInit(M4_TMR02, Tim0_ChannelB, &StcTimer0TrigInit);
}四 设计实现--串口部分
【1】串口初始化:
/* USART baudrate definition */
#define USART4_BAUDRATE
(57600)
/* USART Interrupt Number */
#define USART4_IRQn
(Int025_IRQn)
#define USART4_ERR_IRQn
(Int026_IRQn)
#define USART4_RTO_IRQn
(Int029_IRQn)
/* USART RX Port/Pin definition */
#define USART4_RX_PORT
(PortE)
#define USART4_RX_PIN
(Pin14)
#define USART4_RX_FUNC
(Func_Usart4_Rx)
void initUART4(void)
{
en_result_t enRet = Ok;
stc_irq_regi_conf_t stcIrqRegiCfg;
/*配置串口使用的时钟和基本通信配置*/
const stc_usart_uart_init_t stcInitCfg = {
UsartIntClkCkOutput,
UsartClkDiv_1,
UsartDataBits8,
UsartDataLsbFirst,
UsartOneStopBit,
UsartParityNone,
UsartSampleBit8,
UsartStartBitFallEdge,
UsartRtsEnable,
};
/*打开时钟*/
PWC_Fcg1PeriphClockCmd(PWC_FCG1_PERIPH_USART4, Enable);
/*配置相应的IO作为串口的RX引脚*/
PORT_SetFunc(USART4_RX_PORT, USART4_RX_PIN, USART4_RX_FUNC, Disable);
/*初始化串口配置*/
enRet = USART_UART_Init(M4_USART4, &stcInitCfg);
if (enRet != Ok)while (1);
/*串口波特率设置*/
enRet = USART_SetBaudrate(M4_USART4, USART4_BAUDRATE);
if (enRet != Ok)while (1);
/*设置串口接收中断*/
stcIrqRegiCfg.enIRQn = USART4_IRQn;
stcIrqRegiCfg.pfnCallback = &Usart4RxIrqCallback;
stcIrqRegiCfg.enIntSrc = INT_USART4_RI;
enIrqRegistration(&stcIrqRegiCfg);
NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);
NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);
NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);
/*设置串口接收错误中断*/
stcIrqRegiCfg.enIRQn = USART4_ERR_IRQn;
stcIrqRegiCfg.pfnCallback = &Usart4ErrIrqCallback;
stcIrqRegiCfg.enIntSrc = INT_USART4_EI;
enIrqRegistration(&stcIrqRegiCfg);
NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);
NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);
NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);
/*设置接收超时中断*/
stcIrqRegiCfg.enIRQn = USART4_RTO_IRQn;
stcIrqRegiCfg.pfnCallback = &Usart4TimeoutIrqCallback;
stcIrqRegiCfg.enIntSrc = INT_USART4_RTO;
enIrqRegistration(&stcIrqRegiCfg);
NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);
NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);
NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);
USART_FuncCmd(M4_USART4, UsartRx, Enable);//使能接收
USART_FuncCmd(M4_USART4, UsartRxInt, Enable);//使能接收中断
USART_FuncCmd(M4_USART4, UsartTimeOut, Enable);//使能超时
USART_FuncCmd(M4_USART4, UsartTimeOutInt, Enable);//使能超时中断
}【2】串口接收中断回调:
#define ENCODER_LEN
6
uint8_t ecd_buf[ENCODER_LEN];
uint8_t ecd_timeout_flag;
static void Usart4RxIrqCallback(void)
{
static uint8_t cnt = 0;
while(1)
{
if (Set == USART_GetStatus(M4_USART4, UsartRxNoEmpty))
{
if(ecd_timeout_flag == 1)
//如果超时,下一个接收到的即为起始位
cnt = 0;
ecd_buf[cnt++] = USART_RecData(M4_USART4);
ecd_timeout_flag = 0;
if(cnt > 5)
cnt = 0;
}
else
break;
}
}【3】串口接收错误中断回调:
static void Usart4ErrIrqCallback(void)
{
if (Set == USART_GetStatus(M4_USART4, UsartFrameErr))
USART_ClearStatus(M4_USART4, UsartFrameErr);
if (Set == USART_GetStatus(M4_USART4, UsartParityErr))
USART_ClearStatus(M4_USART4, UsartParityErr);
if (Set == USART_GetStatus(M4_USART4, UsartOverrunErr))
USART_ClearStatus(M4_USART4, UsartOverrunErr);
}【4】串口接收超时中断回调:
static void Usart4TimeoutIrqCallback(void)
{
ecd_timeout_flag = 1;
//下一次接收为通讯码的开始位
TIMER0_Cmd(M4_TMR02, Tim0_ChannelB,Disable);
USART_ClearStatus(M4_USART4, UsartRxTimeOut);
}到这边为止,就可以正常的读到编码器的数据了,而且是以编码器的发送顺序排列在ecd_buf数组中,只要处理该数组就可以取到编码器的多圈圈数和单圈角度。
下面的DMA部分是想改进一下控制方案,使得不那么频繁地进入接收中断,以减小CPU的资源消耗。
五 设计实现--DMA部分
【1】DMA初始化和中断,其中主要关注几点:
一是接收的数据需要映射到ecd_buf的地址:
(stcDmaInit.u32DesAddr = (uint32_t)(&ecd_buf))
二是发送数据模式需要改为递增:
(stcDmaInit.stcDmaChCfg.enDesInc = AddressIncrease):
static void DmaBtcIrqCallback(void)
{
USART_ClearStatus(M4_USART4, UsartRxTimeOut);
//清楚接收超时标志
DMA_ClearIrqFlag(M4_DMA1, DmaCh0, BlkTrnCpltIrq);
}
static void DmaInit(void)
{
stc_dma_config_t stcDmaInit;
stc_irq_regi_conf_t stcIrqRegiCfg;
/* Enable peripheral clock */
PWC_Fcg0PeriphClockCmd(PWC_FCG0_PERIPH_DMA1 | PWC_FCG0_PERIPH_DMA2,Enable);
/* Enable DMA. */
DMA_Cmd(M4_DMA1,Enable);
/* Initialize DMA. */
MEM_ZERO_STRUCT(stcDmaInit);
stcDmaInit.u16BlockSize = 1u; /* 1 block */
stcDmaInit.u32SrcAddr = ((uint32_t)(&M4_USART4->DR)+2ul); /* Set source address. */
stcDmaInit.u32DesAddr = (uint32_t)(&ecd_buf);
/* Set destination address. */
stcDmaInit.stcDmaChCfg.enSrcInc = AddressFix;
/* Set source address mode. */
stcDmaInit.stcDmaChCfg.enDesInc = AddressIncrease;
/* Set destination address mode. */
stcDmaInit.stcDmaChCfg.enIntEn = Enable;
/* Enable interrupt. */
stcDmaInit.stcDmaChCfg.enTrnWidth = Dma8Bit;
/* Set data width 8bit. */
DMA_InitChannel(M4_DMA1, DmaCh0, &stcDmaInit);
/* Enable the specified DMA channel. */
DMA_ChannelCmd(M4_DMA1, DmaCh0, Enable);
/* Clear DMA flag. */
DMA_ClearIrqFlag(M4_DMA1, DmaCh0, TrnCpltIrq);
/* Enable peripheral circuit trigger function. */
PWC_Fcg0PeriphClockCmd(PWC_FCG0_PERIPH_AOS,Enable);
/* Set DMA trigger source. */
DMA_SetTriggerSrc(M4_DMA1, DmaCh0, EVT_USART4_RI);
/* Set DMA block transfer complete IRQ */
stcIrqRegiCfg.enIRQn = Int030_IRQn;
stcIrqRegiCfg.pfnCallback = &DmaBtcIrqCallback;
stcIrqRegiCfg.enIntSrc = INT_DMA1_BTC0;
enIrqRegistration(&stcIrqRegiCfg);
NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);
NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);
NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);
}【2】串口接收中断就不用了,由DMA直接接收即可:
//串口接收错误中断回调
static void Usart4ErrIrqCallback(void)
{
if (Set == USART_GetStatus(M4_USART4, UsartFrameErr))
USART_ClearStatus(M4_USART4, UsartFrameErr);
if (Set == USART_GetStatus(M4_USART4, UsartParityErr))
USART_ClearStatus(M4_USART4, UsartParityErr);
if (Set == USART_GetStatus(M4_USART4, UsartOverrunErr))
USART_ClearStatus(M4_USART4, UsartOverrunErr);
}
//串口接收超时中断回调
static void Usart4TimeoutIrqCallback(void)
{
TIMER0_Cmd(M4_TMR02, Tim0_ChannelB,Disable);
USART_ClearStatus(M4_USART4, UsartRxTimeOut);
DMA_ChannelCmd(M4_DMA1, DmaCh0, Disable);
//超时重启DMA,以进行新一轮的接收
DMA_SetDesAddress(M4_DMA1, DmaCh0, (uint32_t)(ecd_buf));
DMA_SetTransferCnt(M4_DMA1, DmaCh0, ENCODER_LEN);
DMA_ChannelCmd(M4_DMA1, DmaCh0, Enable);
}
void initUART4(void)
{
en_result_t enRet = Ok;
stc_irq_regi_conf_t stcIrqRegiCfg;
/*配置串口使用的时钟和基本通信配置*/
const stc_usart_uart_init_t stcInitCfg = {
UsartIntClkCkOutput,
UsartClkDiv_1,
UsartDataBits8,
UsartDataLsbFirst,
UsartOneStopBit,
UsartParityNone,
UsartSampleBit8,
UsartStartBitFallEdge,
UsartRtsEnable,
};
DmaInit();
/*打开时钟*/
PWC_Fcg1PeriphClockCmd(PWC_FCG1_PERIPH_USART4, Enable);
/*配置相应的IO作为串口的RX引脚*/
PORT_SetFunc(USART4_RX_PORT, USART4_RX_PIN, USART4_RX_FUNC, Disable);
/*初始化串口配置*/
enRet = USART_UART_Init(M4_USART4, &stcInitCfg);
if (enRet != Ok)while (1);
/*串口波特率设置*/
enRet = USART_SetBaudrate(M4_USART4, USART4_BAUDRATE);
if (enRet != Ok)while (1);
/*设置串口接收中断舍弃*/
/*设置串口接收错误中断*/
stcIrqRegiCfg.enIRQn = USART4_ERR_IRQn;
stcIrqRegiCfg.pfnCallback = &Usart4ErrIrqCallback;
stcIrqRegiCfg.enIntSrc = INT_USART4_EI;
enIrqRegistration(&stcIrqRegiCfg);
NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);
NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);
NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);
/*设置接收超时中断*/
stcIrqRegiCfg.enIRQn = USART4_RTO_IRQn;
stcIrqRegiCfg.pfnCallback = &Usart4TimeoutIrqCallback;
stcIrqRegiCfg.enIntSrc = INT_USART4_RTO;
enIrqRegistration(&stcIrqRegiCfg);
NVIC_SetPriority(stcIrqRegiCfg.enIRQn, DDL_IRQ_PRIORITY_DEFAULT);
NVIC_ClearPendingIRQ(stcIrqRegiCfg.enIRQn);
NVIC_EnableIRQ(stcIrqRegiCfg.enIRQn);
USART_FuncCmd(M4_USART4, UsartRx, Enable);//使能接收
USART_FuncCmd(M4_USART4, UsartRxInt, Enable);//使能接收中断
USART_FuncCmd(M4_USART4, UsartTimeOut, Enable);//使能超时
USART_FuncCmd(M4_USART4, UsartTimeOutInt, Enable);//使能超时中断
}项目中只需要用到串口数据的接收,所以这边没有DMA发送的内容。
六 总结
综上,便可以通过串口接收超时中断或者串口接收超时中断+DMA进行接收了。通过DEBUG也可以看到ecd_buf中的数据按顺序排列为0x00,0x00,0xDD,0x2E,0x38,0x77,与逻辑分析仪中的一致:
最后
以上就是隐形星星最近收集整理的关于【嵌入式】HC32F460串口接收超时中断+DMA一 项目背景二 原理说明三 设计实现--超时定时器部分四 设计实现--串口部分五 设计实现--DMA部分六 总结的全部内容,更多相关【嵌入式】HC32F460串口接收超时中断+DMA一内容请搜索靠谱客的其他文章。








发表评论 取消回复