机甲大师-球体追踪

球体追踪是通过MU视觉传感器,调用球体识别算法,将识别到的球体纵坐标、横坐标、高度、宽度等信息反馈到控制板上,控制板将该信息处理并执。
接下来我们就要用机甲大师来完成实验。
硬件连接:
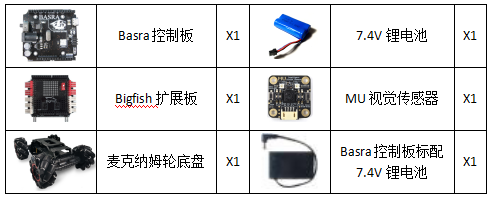
准备好实验所需要的硬件,我们介绍下MU视觉传感器以及硬件方面的知识点

MU 视觉传感器是一款用于图像识别的传感器,其a内置的深度学习引擎可以识别多种目标物体,例如颜色检测、球体检测、人体检测、卡片识别等。检测结果可以通过 UART 或 I2C 进 行输出,体积小巧,功耗低,所有算法本地处理,无须联网,可广泛应用于智能玩具、人工智能教具等产品或领域。
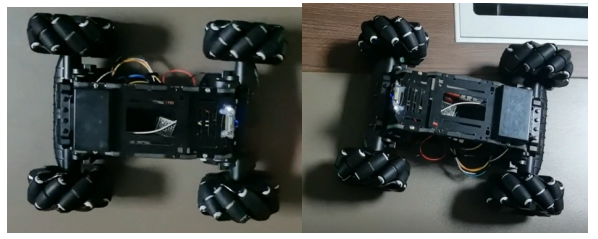
- 初识麦克纳姆轮

麦克纳姆轮是瑞典麦克纳姆公司的专利。该车轮是一种可以全方向移动的装置,这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,全向移动经常是麦克纳姆轮必需的功能,全向移动意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用全向轮或麦克纳姆轮这两种特殊轮子。

近年来,智能存储机器人的软硬件技术不断成熟,随着我国仓储物流的升级,物流装备正从自动化向智能化发展,其中,麦克纳姆轮智能仓储机器人的应用,进行智能拣选,智能分拣和智能搬运。
- 设置MU视觉传感器
I2C模式:
将模块左侧输出模式拨码开关1拨至下方,2拨至上方,切换至I2C模式;
将模块输出接口SDA口接至Arduino对应的SDA口,SCL口接至Arduino对应的SCL口。
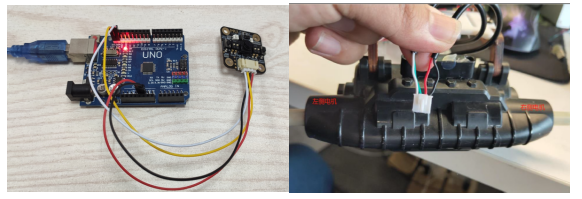
- 连接电机
| 编号 | 线颜色 | 线程说明 | 控制板引脚 |
| 1 | 白色 | 左侧电机 负 | D6 |
| 2 | 绿色 | 左侧电机 正 | D5 |
| 3 | 红色 | 右侧电机 正 | D9 |
| 4 | 黑色 | 右侧电机 负 | D10 |
- 最终效果
案例实现:
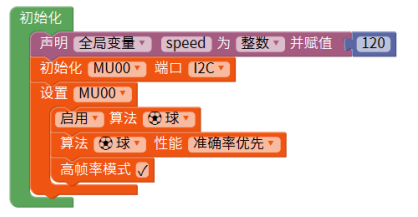
初始化我们定义一个全局变量“speed”,并为其赋值120,该变量主要控制小车的移动速度。
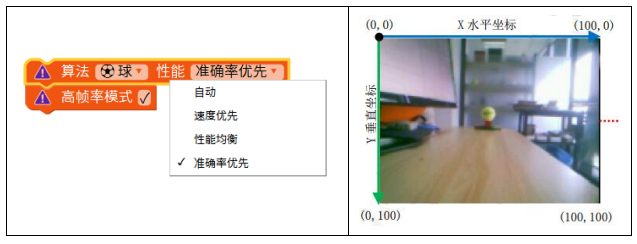
我们可以通过代码调整球体性能以及高帧率模式,当然,开启高帧率模式识别效果会更好,但同时也更耗电。右图则是MU视觉识别的范围坐标。
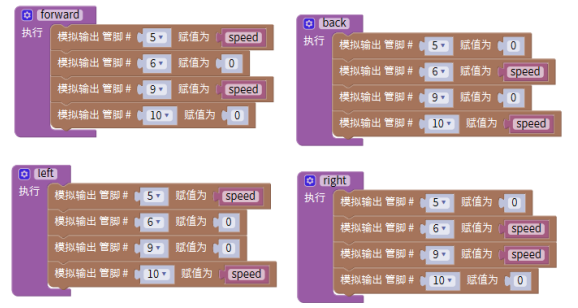
接下来我们定义好4个函数,主要用来控制小车的前进、后退、左转、右转。这里我们说明一下,4个引脚都为模拟输出引脚,所以我们可以为其赋值一个0~255的值。

该代码块为循环语句,一直循环执行检测球体,当检测到球体时,将识别到的球体坐标返回处理执行
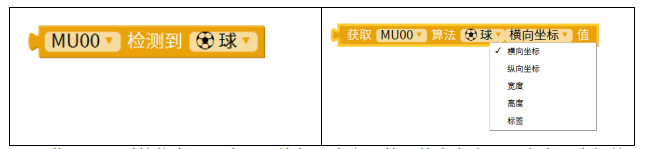
获取识别到的信息主要由这两块代码来完成的,其中高度以及宽度,我们并没有使用到,同学们可以自由发挥,尝试下会出现什么意想不到的效果吧。
机甲大师-球体追踪
进入群聊,共享更多人工智能、Arduino教学资源,QQ群聊:812112744
最后
以上就是能干乐曲最近收集整理的关于通过Arduino自制机甲大师-球体追踪的全部内容,更多相关通过Arduino自制机甲大师-球体追踪内容请搜索靠谱客的其他文章。








发表评论 取消回复