提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
-
目录
前言:
一、使用HAL库生成代码
1、HAL库设置
二、程序编写
1.串口
2.gps.c
GPS.h
3、串口1开启接收
4、main.c
总结
前言:
使用stm3f103c8t6, GPS是NEO-6M
一、使用HAL库生成代码
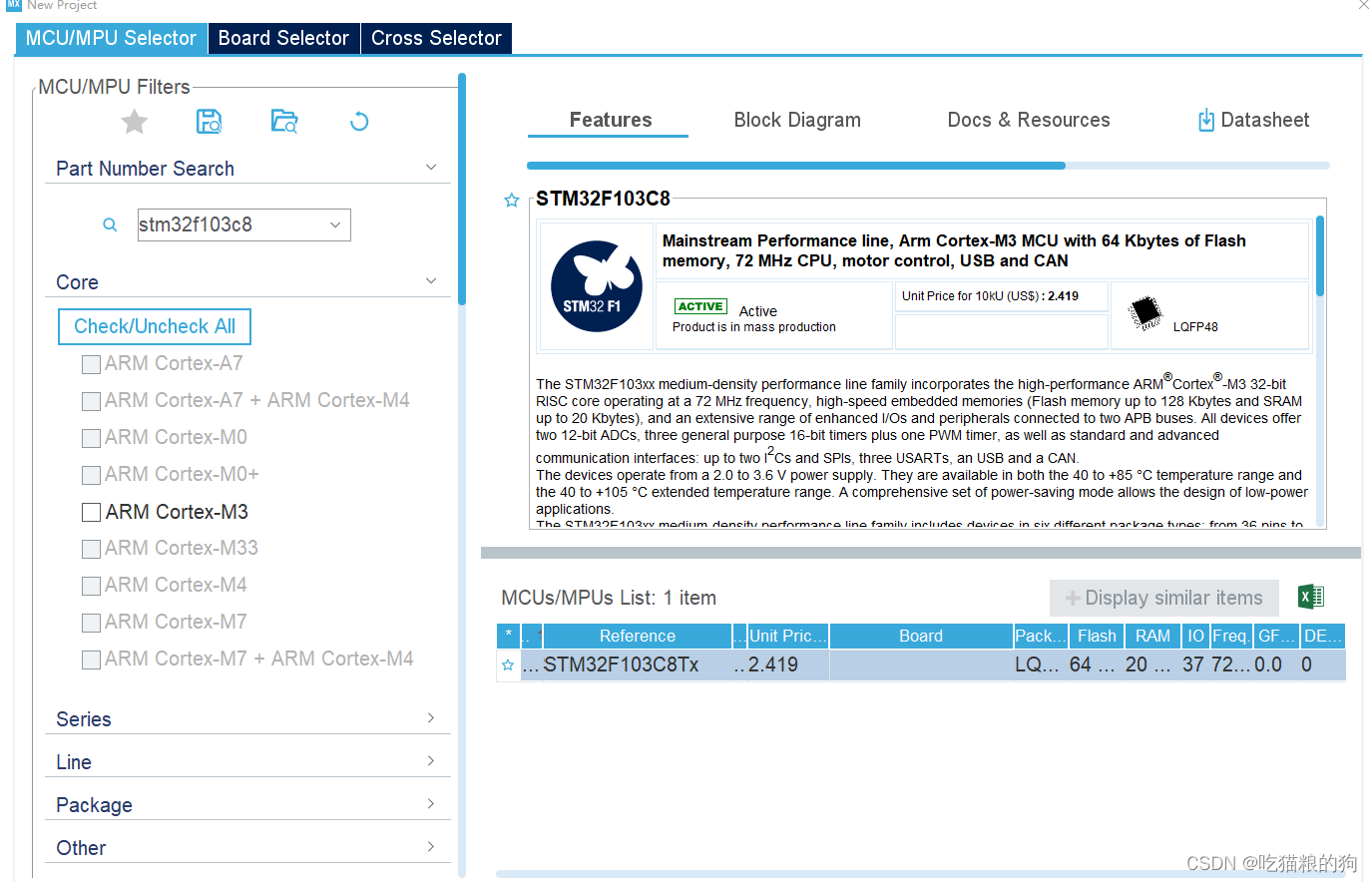
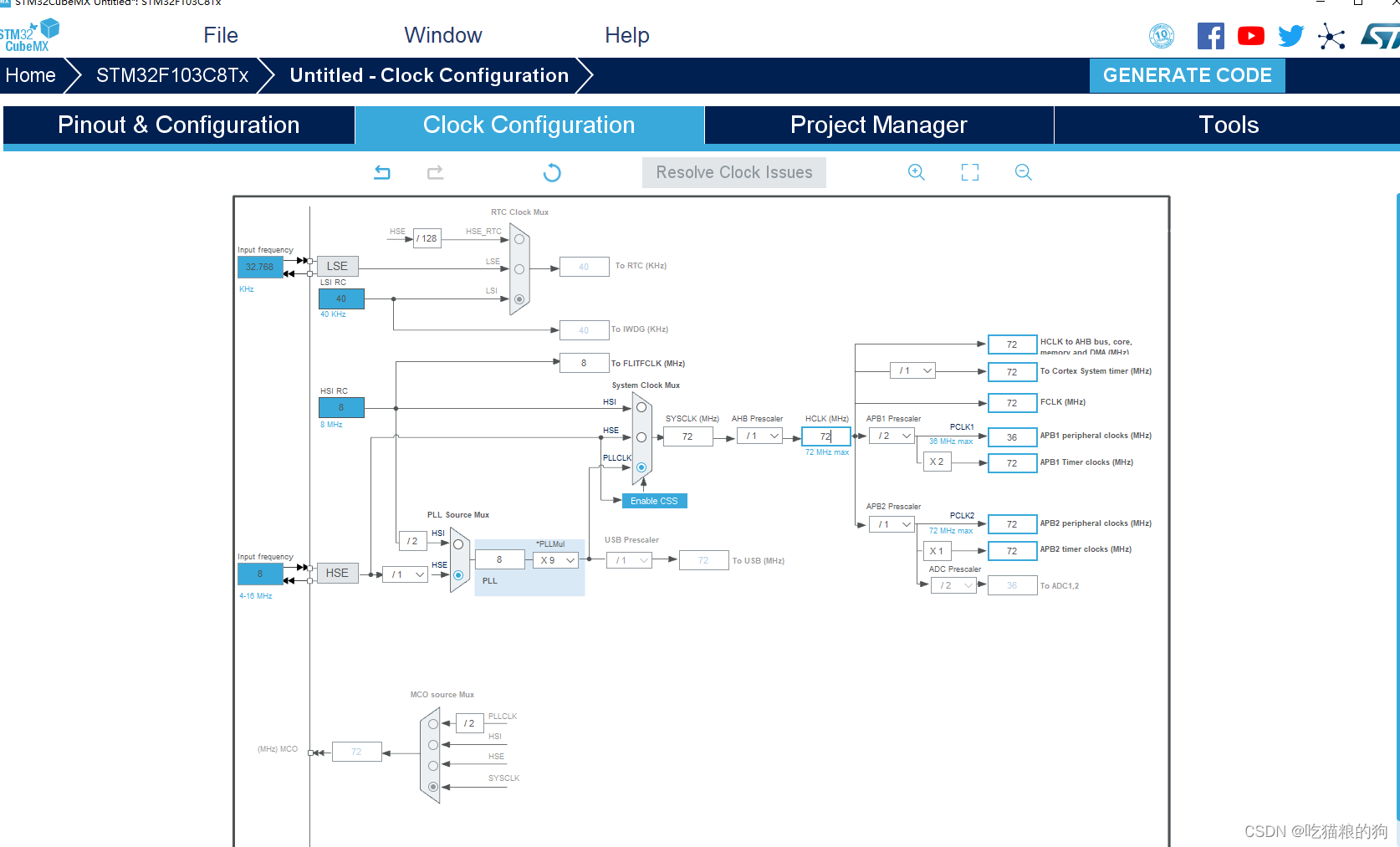
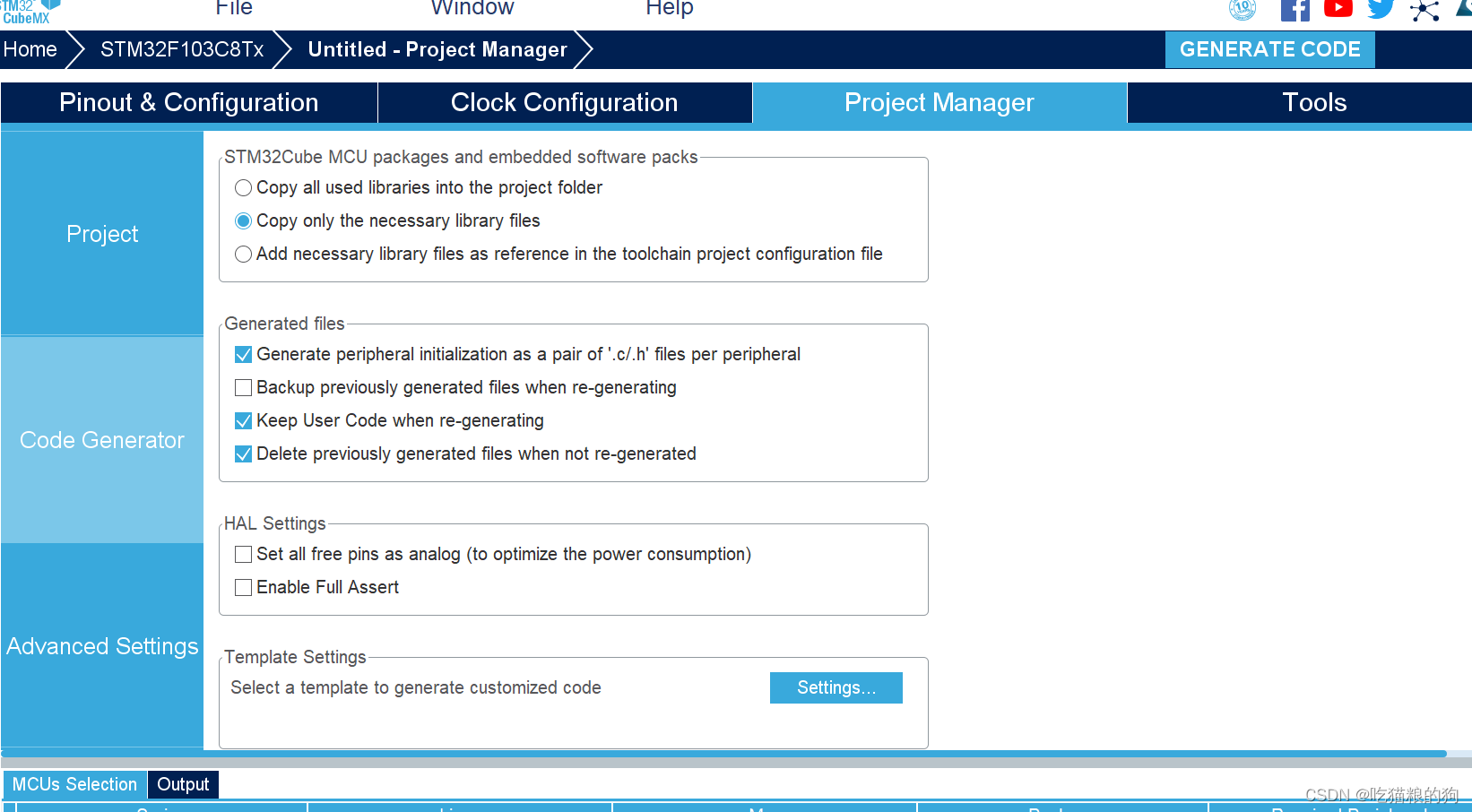
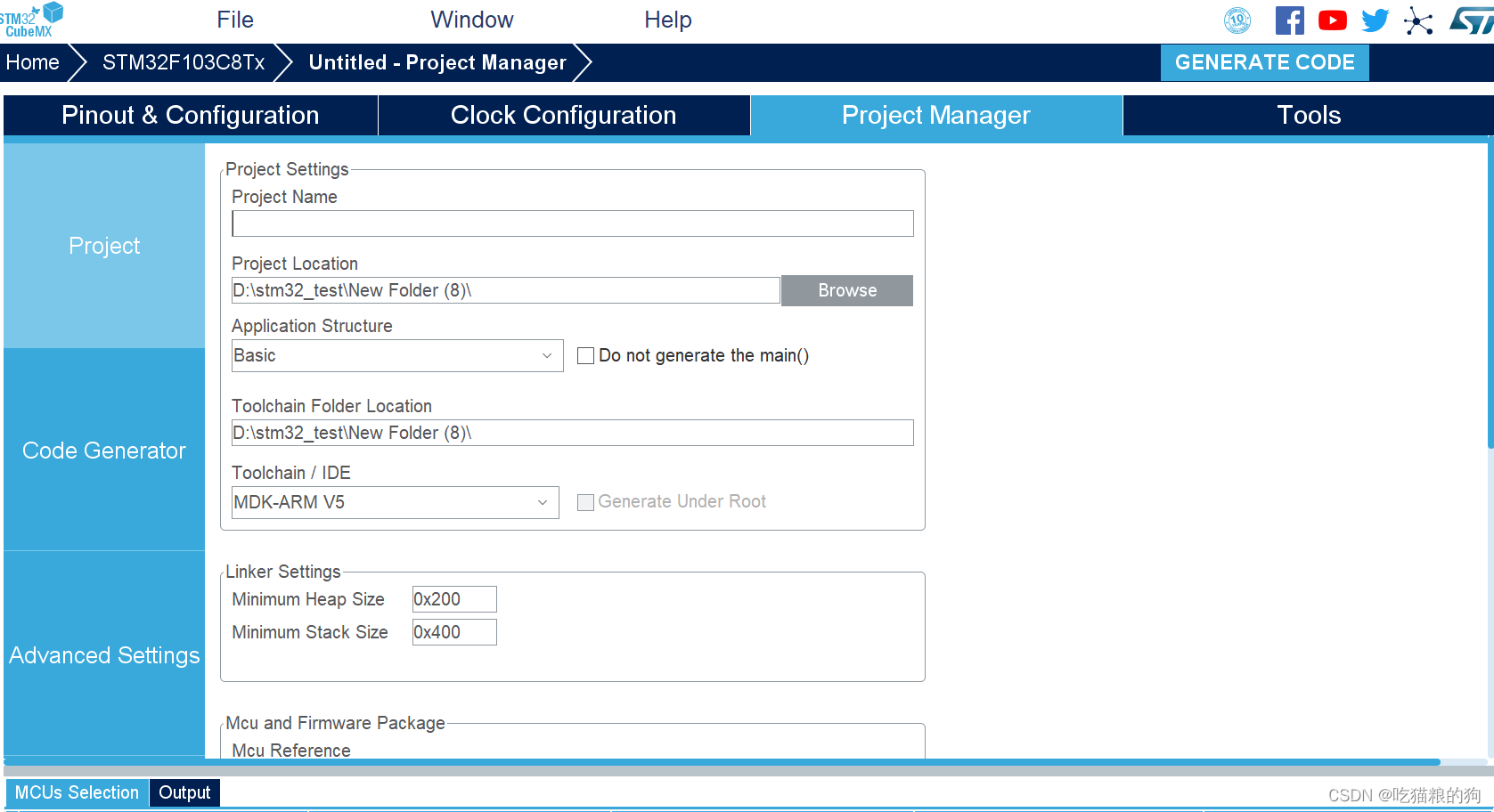
1、HAL库设置
选择使用的芯片
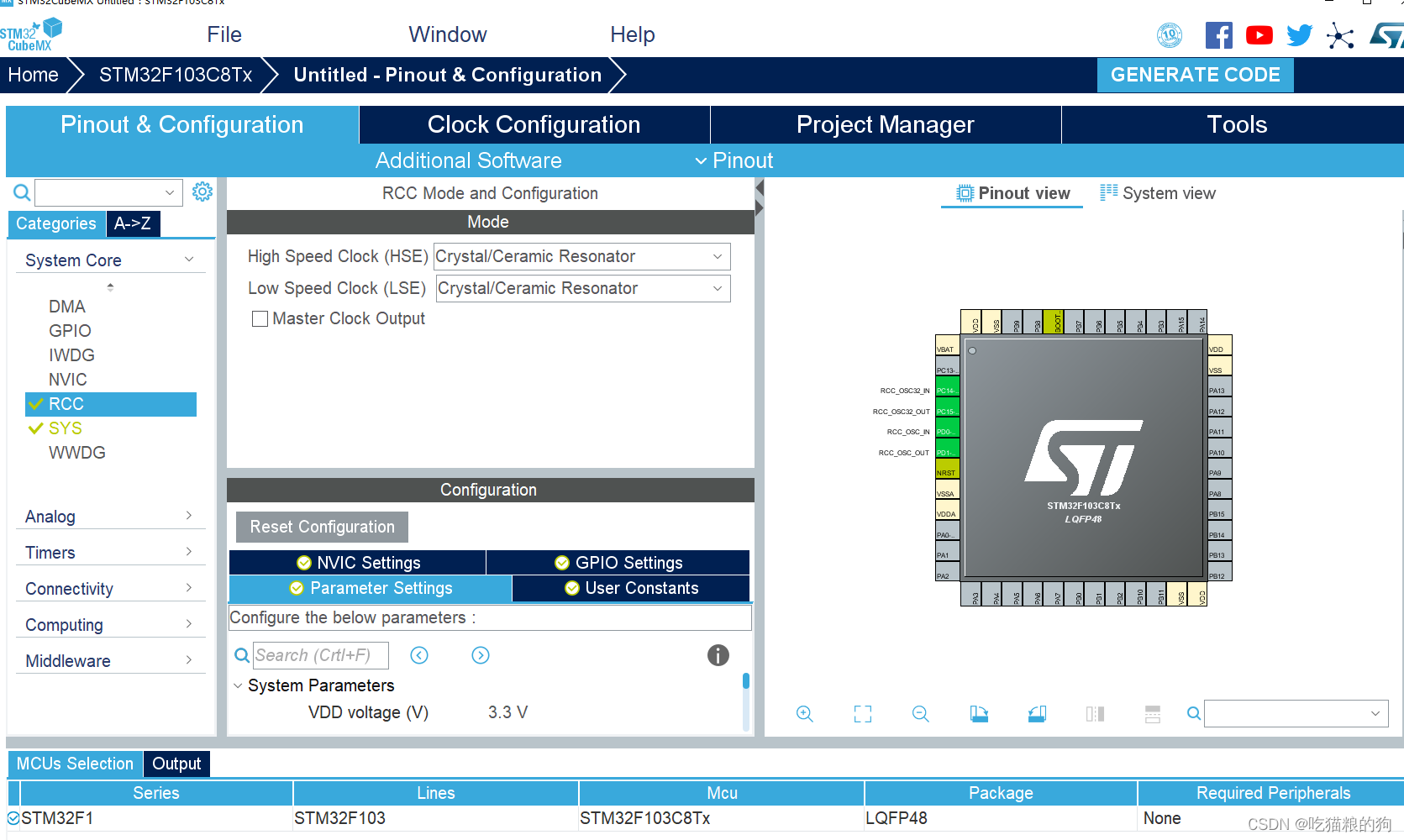
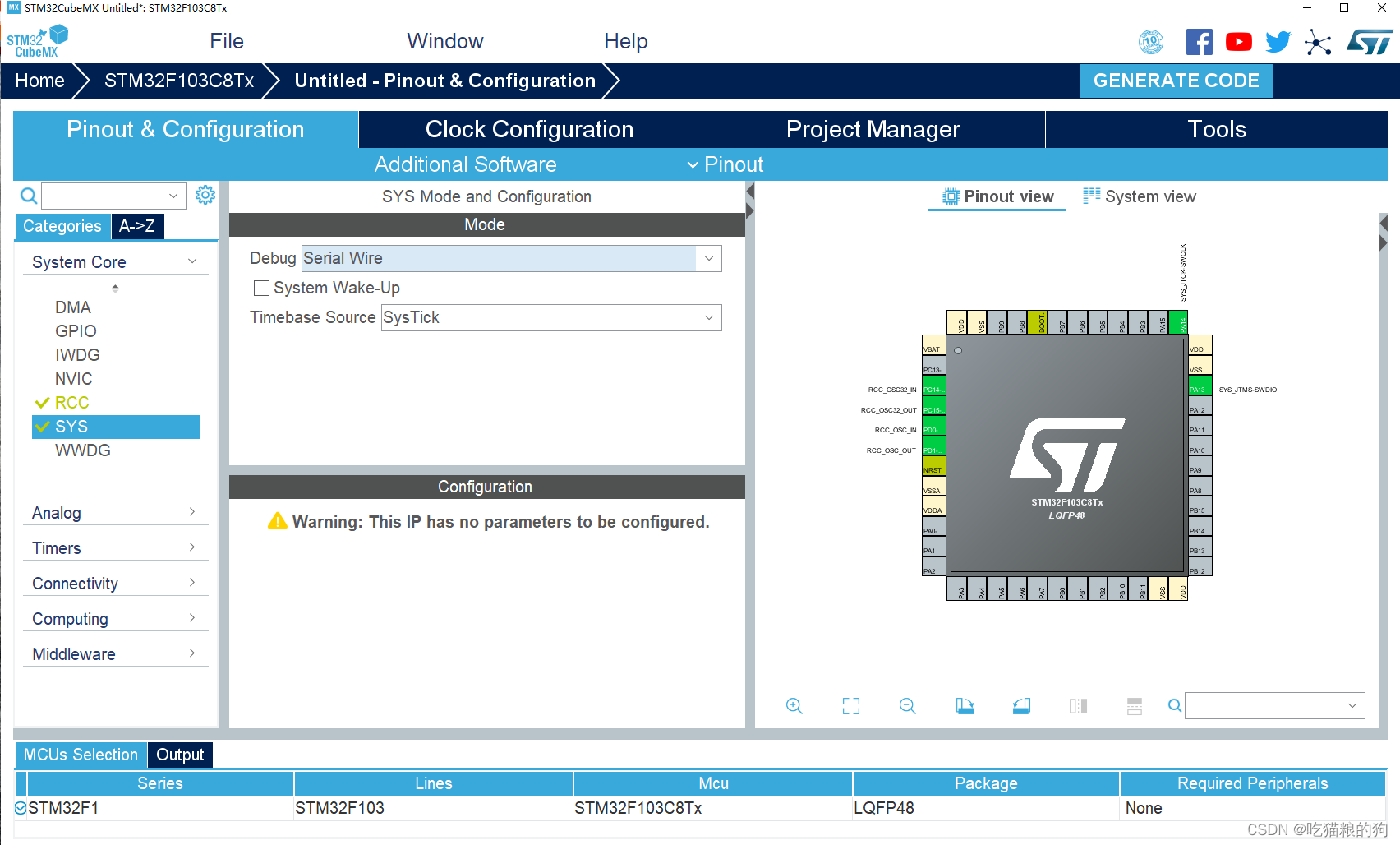
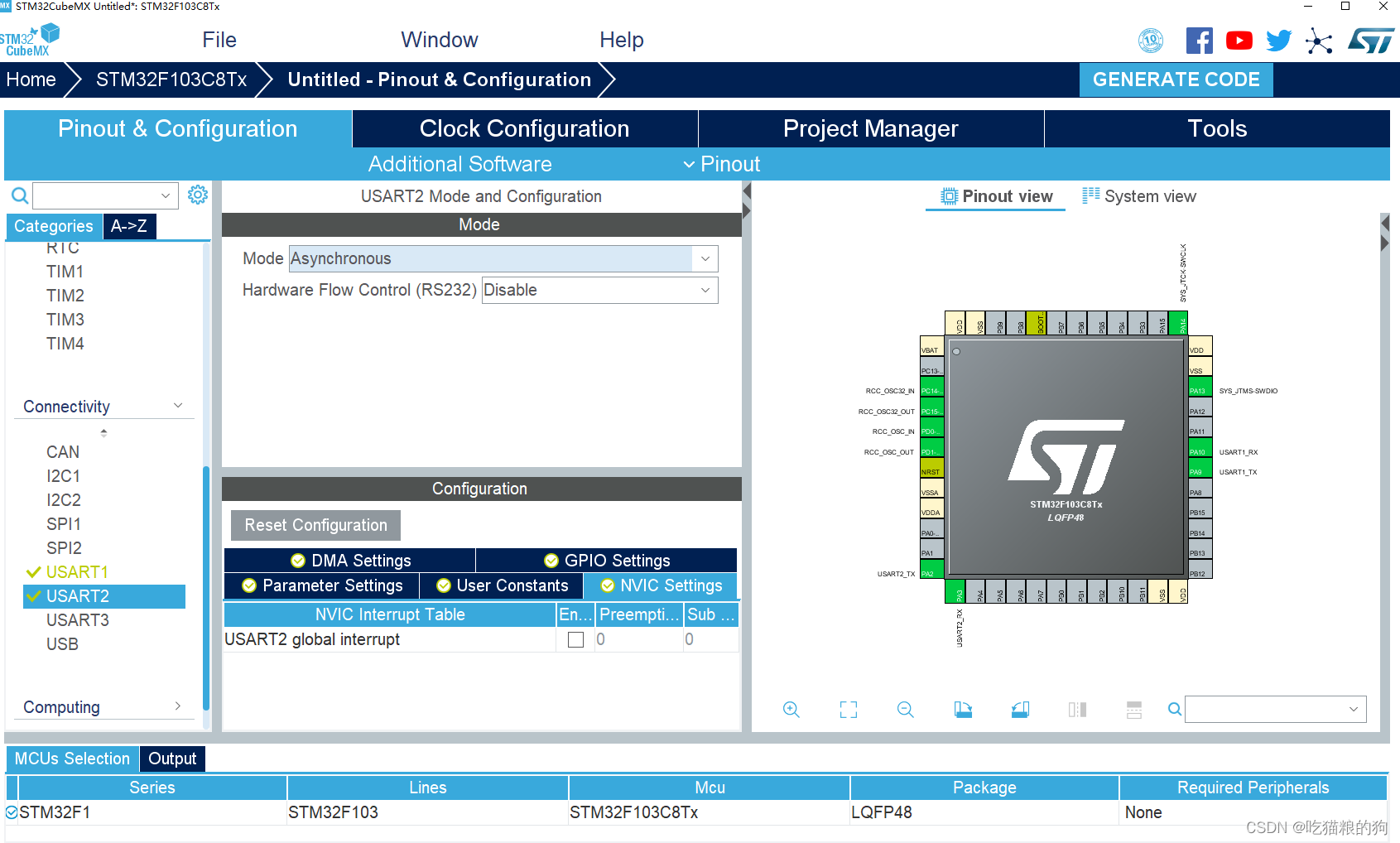
基础配置及打开串口
二、程序编写
1.串口
串口1用来和电脑通讯,串口2用来和GPS模块通讯,波特率设置为9600
printf重定向
在usart.c中添加这个函数
#include "stdio.h" #include "string.h" int fputc(int ch, FILE *f) { HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff); return ch; } /** * 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx * 输入参数: 无 * 返 回 值: 无 * 说 明:无 */ int fgetc(FILE * f) { uint8_t ch = 0; while(HAL_UART_Receive(&huart1,&ch, 1, 0xffff)!=HAL_OK); return ch; }串口2波特率为9600void MX_USART2_UART_Init(void) { huart2.Instance = USART2; huart2.Init.BaudRate = 9600; //这里程序中默认为115200 huart2.Init.WordLength = UART_WORDLENGTH_8B; huart2.Init.StopBits = UART_STOPBITS_1; huart2.Init.Parity = UART_PARITY_NONE; huart2.Init.Mode = UART_MODE_TX_RX; huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart2.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart2) != HAL_OK) { Error_Handler(); } }
2.gps.c
代码如下(示例):
#include "gps.h"
#include "stdio.h"
#include "stdarg.h"
#include "string.h"
#include "math.h"
//m^n函数
//返回值:m^n次方.
uint32_t NMEA_Pow(uint8_t m,uint8_t n)
{
uint32_t result=1;
while(n--)result*=m;
return result;
}
void Andly_GPS(Mgps_msg *Mgps,uint8_t *buf)//解析定位信息
{
uint16_t i=0,j=0,k=0;
uint8_t *p1,dx;
uint32_t temp;
float rs;
p1 = strstr((const char *)buf,"RMC");
// char *json_buff;
if(buf[0]==0) buf[0]=1;//防止有时候首字节为0 出现解析失败
buf=strstr((const char *)buf,"RMC");
if(strstr((const char *)buf,"RMC")!=NULL)
{
buf=strstr((const char *)buf,",A");
i=NMEA_Comma_Pos(buf,2);//第N个逗号所在位置
j=i;k=i;
for(i;i<i+10;i++)
{
if(buf[i]==',') break;
Mgps->latitude[i-j]=buf[i];//维度
if(buf[i]!='.')Mgps->lat[i-k]=buf[i];//维度
else k=k+1;
}
i=NMEA_Comma_Pos(buf,1);//第N个逗号所在位置
j=i;k=i;
for(i;i<i+20;i++)
{
if(buf[i]==',') break;
Mgps->Location[i-j]=buf[i];//定位A V
if(buf[i]!='.')Mgps->lat[i-k]=buf[i];//维度
else k=k+1;
}
i=NMEA_Comma_Pos(buf,4);//第N个逗号所在位置
j=i;k=i;
for(i;i<i+11;i++)
{
if(buf[i]==',') break;
Mgps->longitude[i-j]=buf[i];//经度
if(buf[i]!='.')Mgps->lon[i-k]=buf[i];//经度
else k=k+1;
}
}
}
uint8_t NMEA_Comma_Pos(uint8_t *buf,uint8_t cx)
{
uint8_t *p=buf;
while(cx)
{
if(*buf=='*'||*buf<' '||*buf>'z')return 0XFF;//遇到'*'或者非法字符,则不存在第cx个逗号
if(*buf==',')cx--;
buf++;
}
return buf-p;
}
//str转换为数字,以','或者'*'结束
//buf:数字存储区
//dx:小数点位数,返回给调用函数
//返回值:转换后的数值
int NMEA_Str2num(uint8_t *buf,uint8_t*dx)
{
uint8_t *p=buf;
uint32_t ires=0,fres=0;
uint8_t ilen=0,flen=0,i;
uint8_t mask=0;
int res;
while(1) //得到整数和小数的长度
{
if(*p=='-'){mask|=0X02;p++;}//是负数
if(*p==','||(*p=='*'))break;//遇到结束了
if(*p=='.'){mask|=0X01;p++;}//遇到小数点了
else if(*p>'9'||(*p<'0')) //有非法字符
{
ilen=0;
flen=0;
break;
}
if(mask&0X01)flen++;
else ilen++;
p++;
}
if(mask&0X02)buf++; //去掉负号
for(i=0;i<ilen;i++) //得到整数部分数据
{
ires+=NMEA_Pow(10,ilen-1-i)*(buf[i]-'0');
}
if(flen>5)flen=5; //最多取5位小数
*dx=flen; //小数点位数
for(i=0;i<flen;i++) //得到小数部分数据
{
fres+=NMEA_Pow(10,flen-1-i)*(buf[ilen+1+i]-'0');
}
res=ires*NMEA_Pow(10,flen)+fres;
if(mask&0X02)res=-res;
return res;
}
GPS.h
#ifndef __gps_H
#define __gps_H
#include "main.h"
#include "string.h"
#include "stdio.h"
#include "usart.h"
typedef struct
{
uint8_t latitude[10]; //纬度
uint8_t longitude[11]; //经度
uint8_t Location[1]; //定位有效A 定位无效V
uint8_t lat[20]; //纬度
uint8_t lon[20];
uint8_t latt; //经度
}Mgps_msg;
extern Mgps_msg Mgps;
void Andly_GPS(Mgps_msg *Mgps,uint8_t *buf);
uint8_t NMEA_Comma_Pos(uint8_t *buf,uint8_t cx);
void Gps_Msg_Show(void);//显示GPS定位信息
int NMEA_Str2num(uint8_t *buf,uint8_t*dx);
#endif
3、串口1开启接收
void HAL_UART_RxCpltCallback(UART_HandleTypeDef * huart)
{
if(huart->Instance == USART2)
{
//
HAL_UART_Transmit(&huart1,OTA_buff,1,100);//串口1发送接收buff里的东西
HAL_UART_Receive_IT(&huart2,USART2_RX_BUF,1); //重新开启串口3接收中断
if(USART2_RX_STA<1023) //还可以接收数据
{
OTA_buff[USART2_RX_STA]=USART2_RX_BUF[0];
USART2_RX_STA++; //记录接收到的值
if(strstr((const char *)OTA_buff,"RMC")!=NULL)
{
GPS_flag =1;//接到RMC
}
}
}
}
4、main.c
HAL_UART_Receive_IT(&huart2,USART2_RX_BUF,1);
if(GPS_flag ==1){
Andly_GPS(&Mgps,OTA_buff);
char *la= NULL;
la = Mgps.latitude;
printf("纬度:");
printf("rn%srn",Mgps.latitude);
char *lo= NULL;
lo = Mgps.longitude;
printf("经度:");
printf("rn%sn",Mgps.longitude);
HAL_Delay(100);
}
总结
解析到的GPS存放在Mgps.longitude和Mgps.latitude中
最后
以上就是腼腆大门最近收集整理的关于STM32GPS定位 NEO_6M前言:一、使用HAL库生成代码二、程序编写3、串口1开启接收4、main.c总结的全部内容,更多相关STM32GPS定位内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复