读书笔记2:Bode图的理解
- 摘要
- 一、Bode图的认识
- 1、幅频(幅值vs频率) 特性曲线
- 备注:
- 2、相频(相位vs频率) 特性曲线
- 备注:
- 3、性能指标 - 响应快速性和稳定性
- 二、Bode图实例:ACS+直线模组调试
- 1、更正之前调试的错误:
- 2、性能分析实例:
摘要
记录目的:学会如何正确的分析Bode图,并应用到在实际驱动调试中。
2020.11.10:《控制系统设计指南》作者在第二章就安排讨论了频率域研究法,记录一下:
为在贯穿整个控制理论领域内论述实际问题,频率域描述是更为直观的。诸如,响应如何量化,系统的稳定性如何,他应该有怎样的稳定性,如何调试增益,抗扰动性能怎样等。控制理论就是从频率域开始形成并发展起来的。
与频率域相对的是时间域,时间域研究法尤为便捷,它易于理解,也易于测试,用一台示波器测试就立刻明了了。时间域通常是与用户、同事沟通的最好方式。因此,控制工程师应该既对时间域非常熟悉,也应该对频率域非常熟悉。时间域与频率域是两个有证实作用的映像,它们协同一起所能获得的对系统的理解比其中任何一个更为清晰。
问题回答:
- 响应如何量化
- 系统的稳定性如何
- 他应该有怎样的稳定性
- 如何调试增益
- 抗扰动性能怎样
- 。。。
一、Bode图的认识
直观上看,Bode图中有2条曲线。
1、幅频(幅值vs频率) 特性曲线
上半部分绘制的曲线是:因变量Amplitude(幅值,或者说 增益) 随 自变量 ω(ACS绘制定义域默认范围:15~3000Hz)变化而变化绘制出来的曲线。
函数对应关系为:

备注:
“1”的理解:输出响应幅值 与 输入信号幅值 相等;也即,在该情况下,输入到控制系统的信号的幅值得到了100%的输出还原(对于信号的2种基本属性:幅值与频率;这里显而易见,幅值参数只能表现输入与输出信号能量的区别,不能表达出输出信号与输入信号相位之间的关系)。

“0.707”的理解:输出响应幅值 比 输入信号幅值 小;小多少?小了30%,也即,在该情况下,输入到控制系统的信号的幅值 只得到了70.7%的输出还原。
同样,对于 “” 的理解:这个需要从功率的角度理解,比如,涉及到天线,分析天线发射功率的衰减。功率正比于幅值的平方(为什么?暂时不知道),2分之根号2 的平方是1/2;也即,-3dB表示的是,此时,控制系统输出的功率(能量)比 输入的功率 小了,小了也就是损失了,损失了多少,损失了50%,损失了一半。所以,也称-3dB点 叫 半功率点。
-3dB在Bode图分析中经常被提到,比如:增益下降3dB的频率点就是功率下降的一半,3dB带宽,-3dB带宽,-3dB对应的频率称为截止频率等等。这些是什么意思?慢慢来~


“0.316”的理解:同样,从幅值上理解是:输出幅值(Output) 比 输入幅值(Input) 小了70%左右;从能量功率角度理解是:0.316^2 = 0.099,输出能量 大约是 输入能量的10%,损失了90%。
2、相频(相位vs频率) 特性曲线
Bode图下半部分绘制的曲线是:因变量Phase(相位,或者说 相角) 自变量 ω 变化而变化绘制出来的曲线。
函数对应关系:

备注:
“phase = 0°”的理解:输出信号 与输入信号之间的相位 相差 0°或者相差整数个360°。
“phase = -180°”的理解:输出信号 比 输入信号之间的相位 滞后 180°,系统处于临界稳定状态。
3、性能指标 - 响应快速性和稳定性
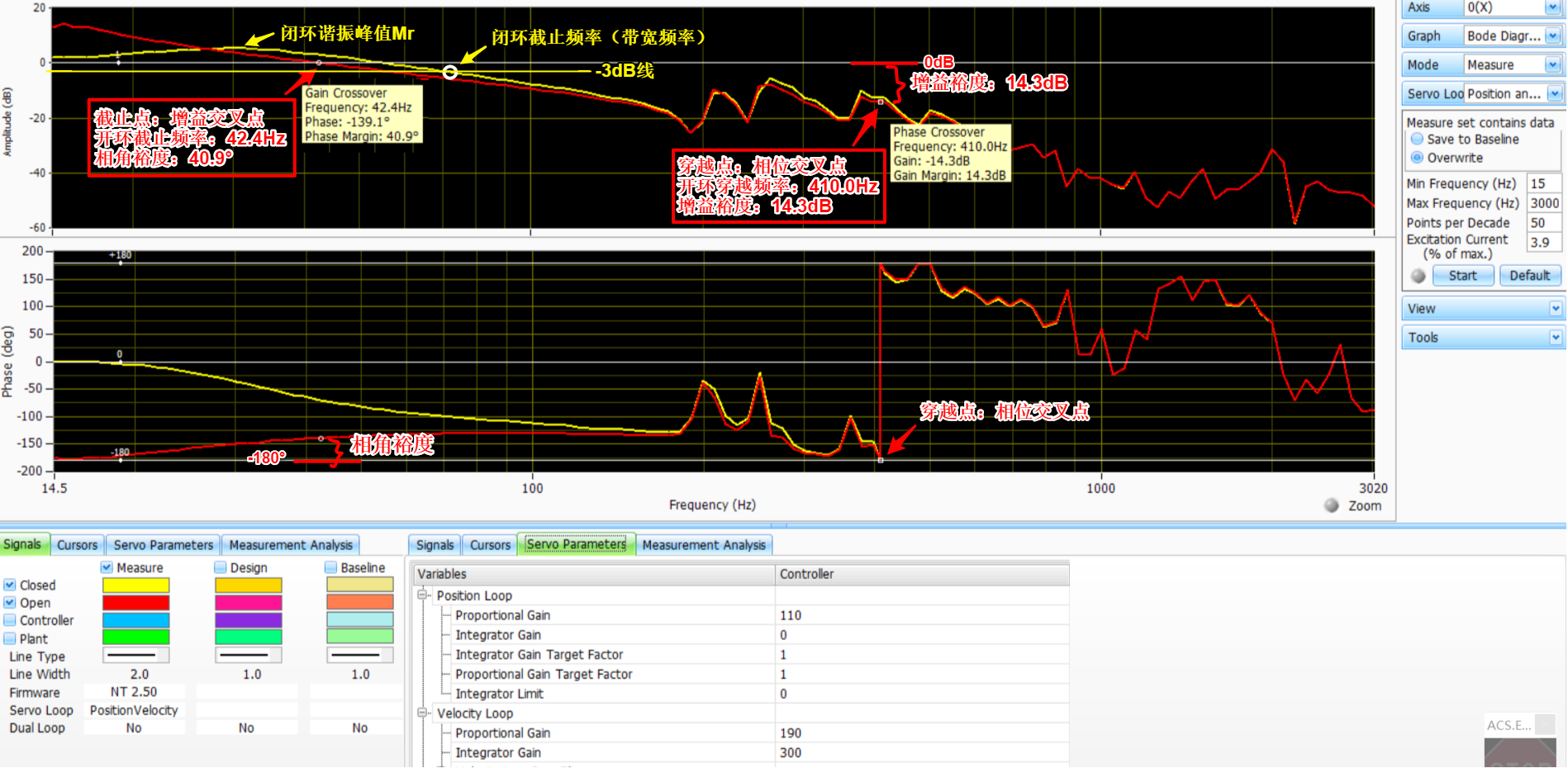
截止频率:在开环Bode图中,是增益曲线与0dB线的交叉点,称为开环截止频率,也称剪切频率,记做 ωc(omega cut);在闭环Bode图中,是增益曲线与-3dB线的交叉点,称为闭环截止频率,也称为带宽频率,记为ωb;频率范围(0,ωb),称为系统的带宽。对于输入端信号,带宽大,则跟踪控制信号的能力强;而另一方面,抑制输入端高频干扰的能力则弱,因此系统带宽的选择在设计中应折中考虑,不能一味求大。(摘自:自动控制原理(胡寿松版))
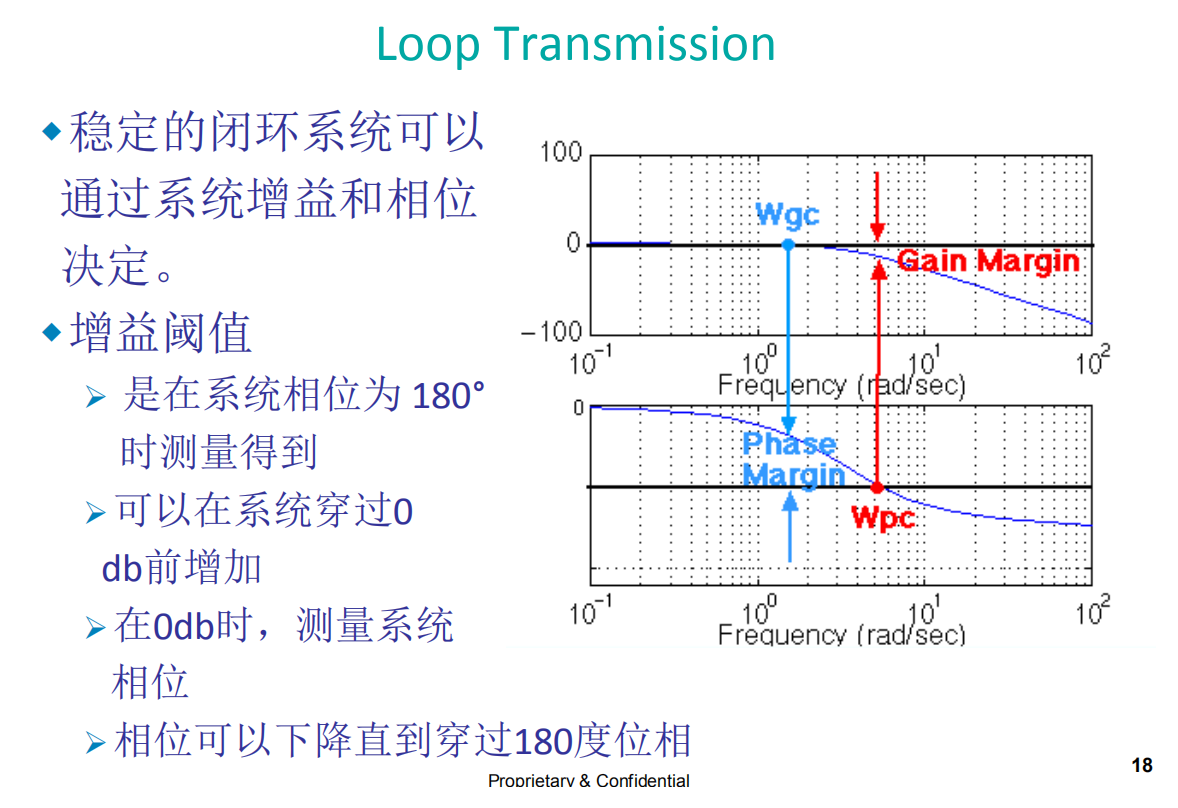
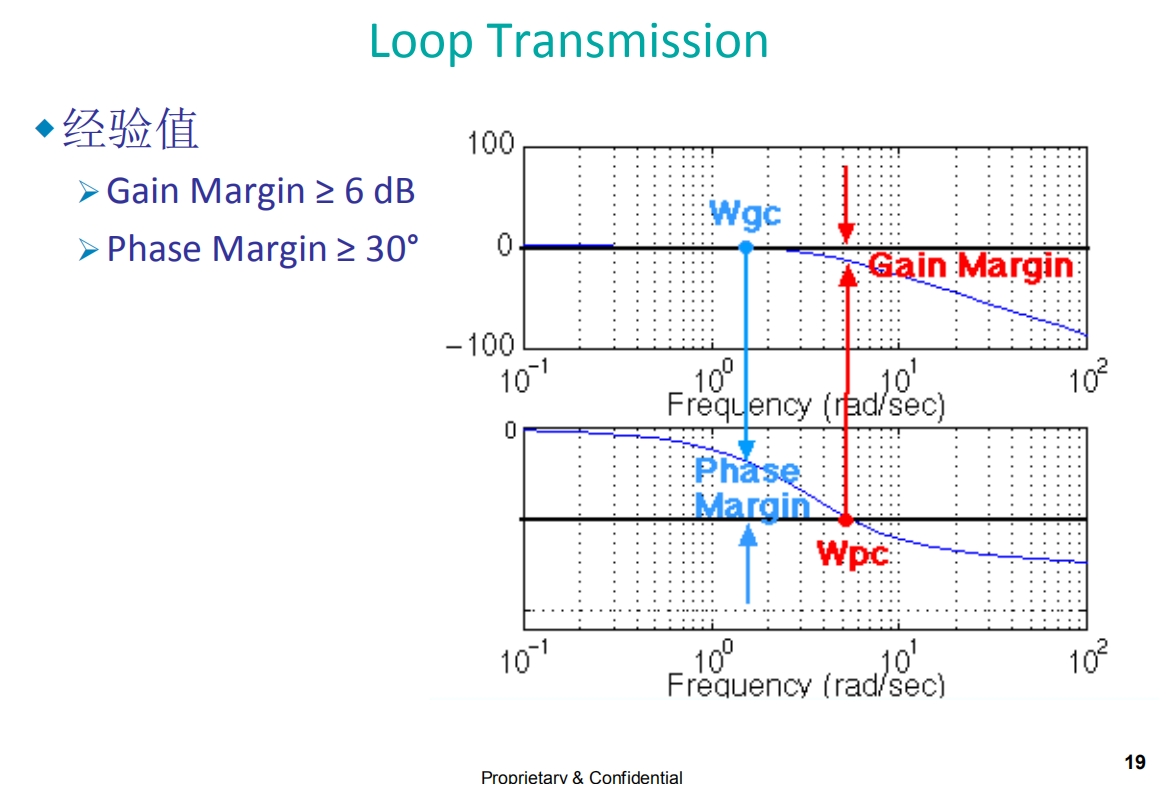
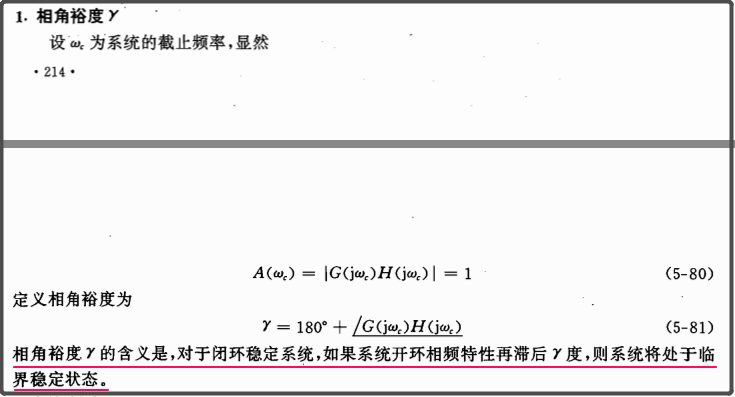
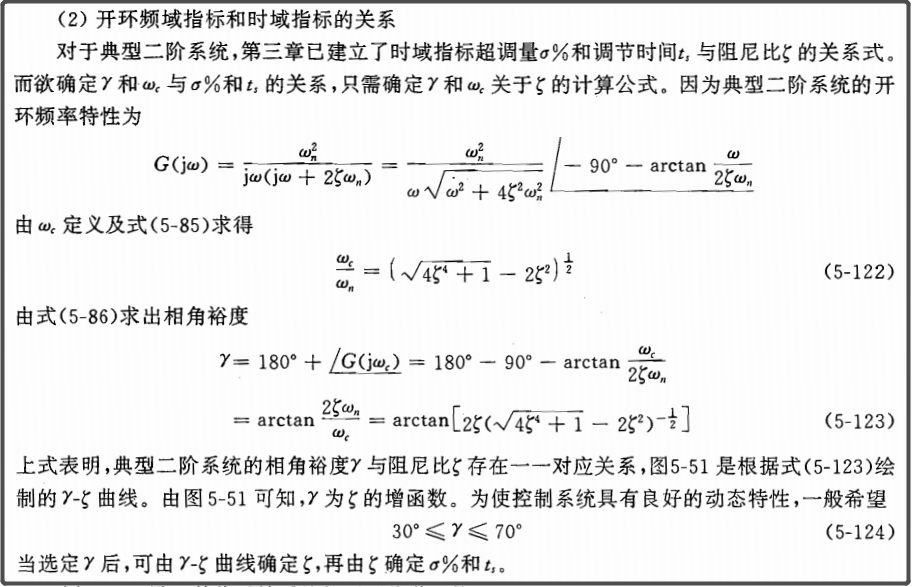
相角裕度(phase margin, PM):也称相位裕度或相位余裕,记为(gamma)。指的是 开环截止频率点对应相位曲线的相位 距离 -180 °这条线还有多少距离 ,还有多少余量;其中,-180°这条线代表的是系统临界稳定,表达的是相位如果再滞后一点点,比如滞后了-185°,系统就不稳定了。裕度用正数表示,裕度值 = 180° - 相位滞后量;计算举例:在开环截止频率 ωc点,系统输出信号相角(相频曲线)是-150°,也即,比输入信号相位滞后了150°,相角裕度就是30°。
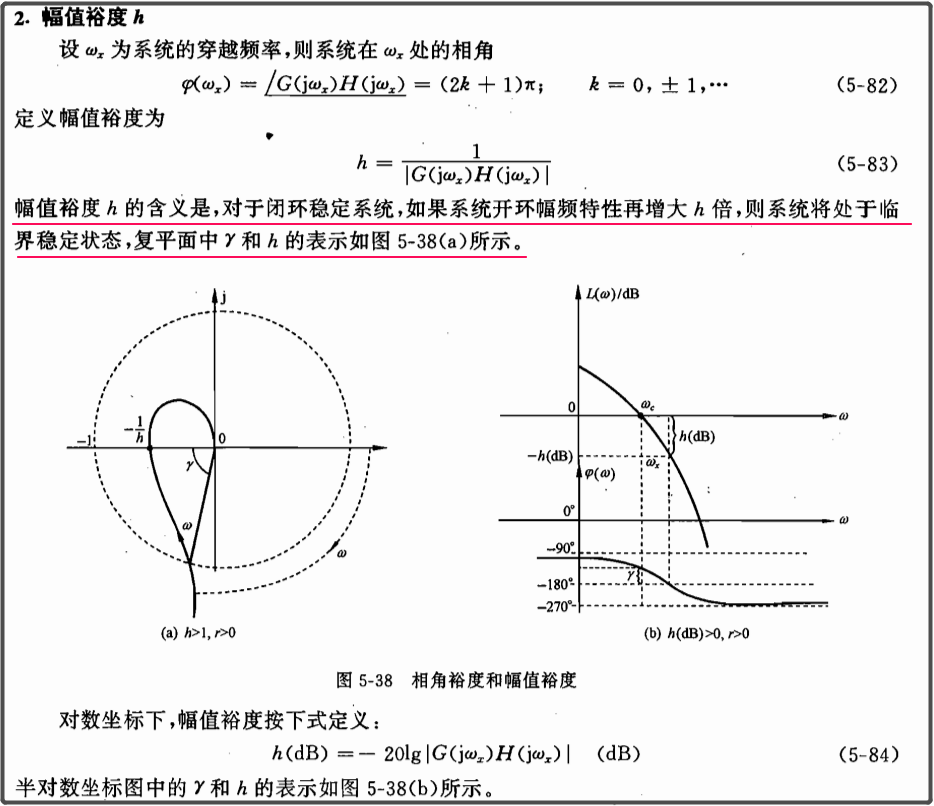
穿越频率: 在开环Bode图中,是相频曲线与-180°线交叉点,称该点对应的频率值为 穿越频率,也称 相角交界频率,记为:ωx。这个频率是用来求增益裕度。
增益裕度(gain margin, GM):系统增益曲线在穿越点频率处的 增益数值,用dB单位描述,称为 增益裕度,也称 幅值裕度,记为。增益裕度表达的是系统在穿越频率这个点,判断系统是不是稳定的,要看增益裕度够不够高,增益裕度越高(离0dB水平线往下越远),表示系统在这个穿越点响应的幅值衰减的越多,越不容易造成共振(这样理解共振,准确吗?)。
稳定裕度
稳定裕度:综合相角裕度和增益裕度,这2个指标,才能综合判断系统的稳定程度。求解相角裕度需要找到截止频率点,求解增益裕度需要找到穿越频率点。
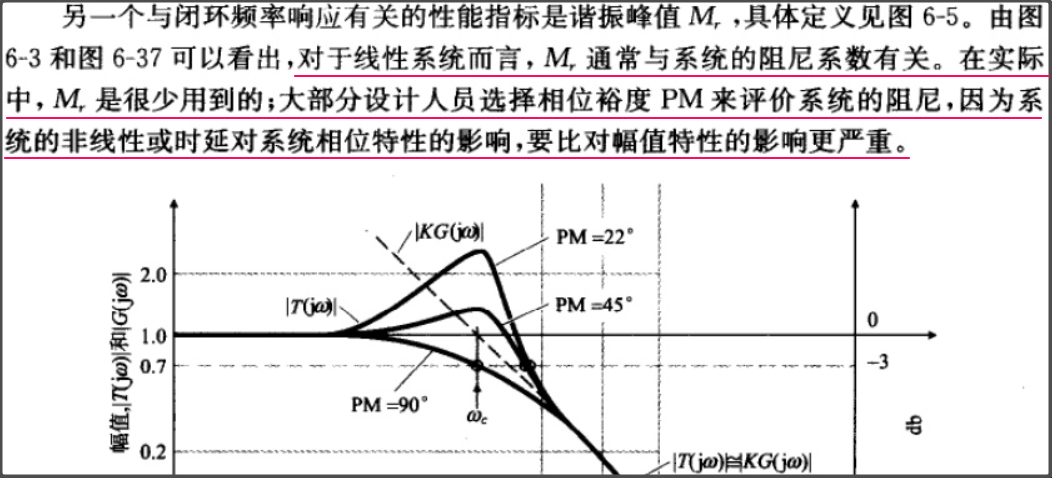
凸峰 - 谐振峰值Mr
凸峰:是闭环Bode图增益曲线在0dB线上方的最高峰值,对应时域指标中的超调量。

二、Bode图实例:ACS+直线模组调试
1、更正之前调试的错误:
图中标注的穿越点要 修改成 截止点
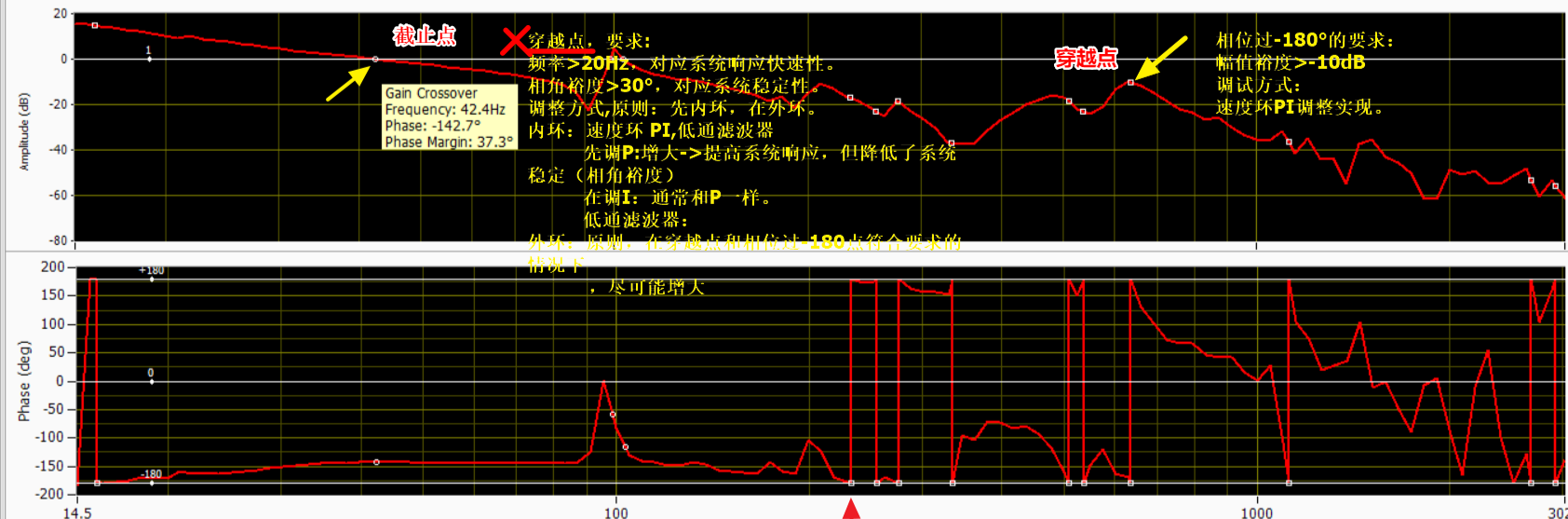
2、性能分析实例:
最后
以上就是乐观汉堡最近收集整理的关于《控制系统设计指南》读书笔记2:Bode图的理解摘要一、Bode图的认识二、Bode图实例:ACS+直线模组调试的全部内容,更多相关《控制系统设计指南》读书笔记2:Bode图内容请搜索靠谱客的其他文章。








发表评论 取消回复