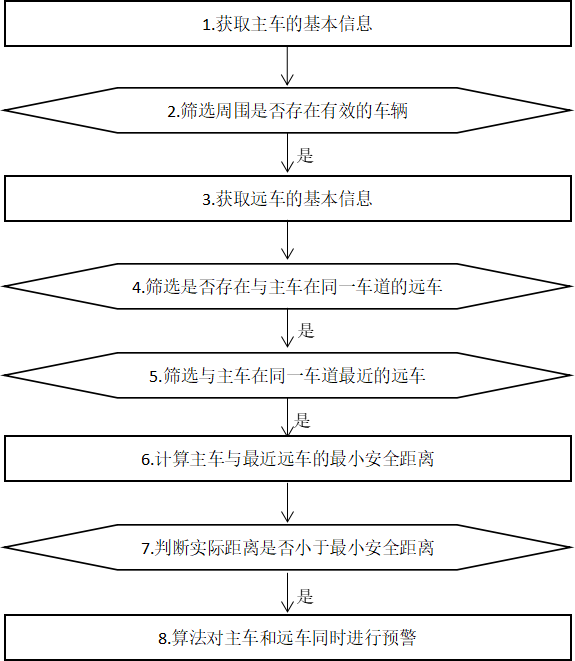
关于C-V2X前向碰撞预警的算法实现,首先需要了解一下前向碰撞预警算法流程图,如下图所示:
背景技术:
本算法主要是基于V2X通信技术,在道路交通中,车辆与车辆之间通过该项技术进行数据交互,将自身的各项基本信息(如位置信息、经度纬度、速度信息、车辆的状态信息)发送给其他车辆,同时也将接收其他车辆的基本信息然后进行算法处理操作,从而有效的避免事故的发生。
技术实现要素:
- 主车可以获取自身的相关信息,包括位置信息、航向角信息、速度信息等,并将自身信息通过广播发送给其他车辆。
- 筛选出周围有效车辆,并获取其他车辆的基本信息。
- 判断周围有效车辆的航向角是否与本车相同,同时也要判断出两车的横向距离差(两车距离的相对宽度)。行驶方向相同,相对宽度控制在一定范围内,即可视为在同一车道上。
- 筛选出与主车在同一车道的并且距离最近的车辆。
- 根据本车基本信息以及远车的基本信息进行最小安全距离的计算,计算公式如下:

这五个阶段所产生的距离总和为最小安全距离。
6. 判断最小安全距离是否大于两车的实际距离。
7. 满足预警条件,判断两车的相对关系分情况进行预警。
判断方向角是否为同向可以采取控制两车的航向角差值控制在某一范围内,例如A车的航向角为65度,B车的航向角为70度,两车的航向角差值的绝对值≤5,我们则认为这两辆车的航向角相同,即行驶方向相同。
如何计算两车的相对宽度,前提是两辆车的航向角相同,如下图所示:
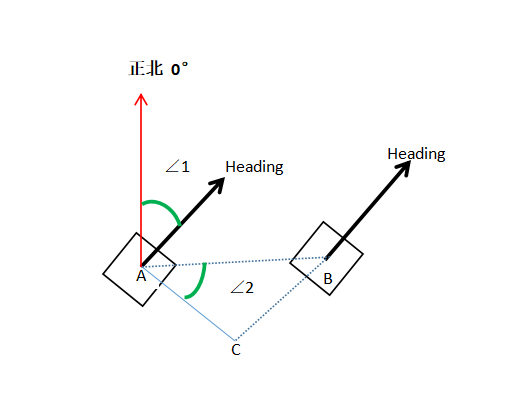
假设车辆A和车辆B为行驶方向相同的车辆,我们想要得到两车位置的相对宽度,如图AC的距离,我们只需要以下3步:
- 确定车A和车B的直线距离,即虚线AB的长度,根据车A和车B的经度和纬度信息可以很容易得到车辆的直线距离的长度。
- 确定∠2的大小,在图中我们不难发现,∠1和∠2为同一个角的余角,所以∠1和∠2相等,又因为∠1为航向角Heading,所以∠2也为Heading大小。
- 确定AC的长度由图很容易得出AC=AB*cos∠2 = AB*cos∠1。
如果我们车A和车B航向角相同,并且相对宽度为2米。我们即可认为两车在同一车道上,满足碰撞的前提条件。
最小安全的距离的计算,假设驾驶员反应的时间为T,制动协调时间为t1,减速增长时间为t2,静止时安全距离为d,根据汽车制动动力学,最小安全距离的计算公式如下:

VS、VF 分别为主车和远车的车速,a为车辆制动安全的加速度,计算出车辆的最小安全距离,然后和车辆的实际距离进行比较,如果最小安全距离大于车辆的实际距离,前向碰撞预警将会触发。
在实际测试中,如果主车和远车在同一车道上行驶,判断条件为:主车的航向角与远车的航向角偏差在一定范围内,并且车辆的相对宽度小于一定的距离。主车行驶速度大于远车的行驶速度,并且主车的相对方位为远车的后方,通过算法计算出的最小安全距离S大于主车和远车的实际距离,算法将会对主车进行预警,如下图所示:

如果主车和远车在同一车道上行驶,判断条件为:主车的航向角与远车的航向角偏差在一定范围内,并且车辆的相对宽度小于一定的距离。主车的行驶速度小于远车的行驶速度,并且主车的相对方位为远车的前方,通过算法计算出的最小安全距离S大于主车和远车的实际距离,算法将会对主车进行预警,如下所示:

结论得出在前向碰撞预警算法触发时,算法将会对前车和后车进行同时预警,算法将会对前车提示预警“注意后方车辆”,算法同时对后方车辆提示预警“注意前方车辆慢速行驶”,当实际情况不满足算法触发条件后,前车、后车的预警消息将会同时消失。
更多内容可关注北京大椽科技有限公司官网:www.dachuantek.com
最后
以上就是健壮百合最近收集整理的关于基于C-V2X前向碰撞预警算法的实现的全部内容,更多相关基于C-V2X前向碰撞预警算法内容请搜索靠谱客的其他文章。








发表评论 取消回复