无人驾驶时代的室外组网技术研究
- 车载自组网
- 车载自组网简介
- 车载自组网特点
- 车载自组网组成及建构
- 主流自组网通信方式
- ZigBee
- WIFI
- Blue Tooth
- WiMAX
- DSRC
- 4G/5G
- 参考文献
车载自组网
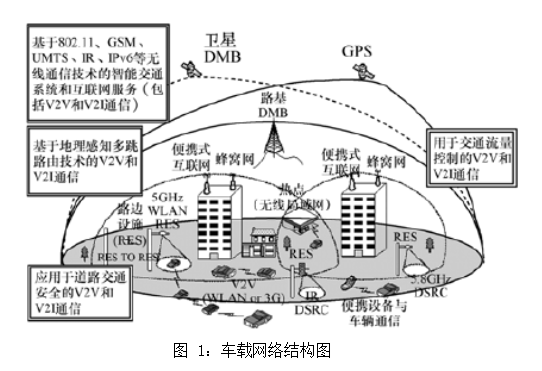
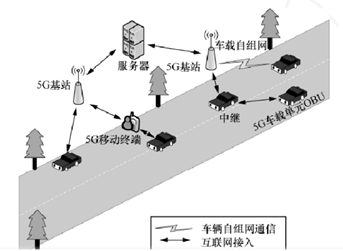
车辆通信网络就是在汽车上装载移动通信设备,为高速行驶中的车辆提供一种高速率的宽带无线接入方式,构建一个以车辆为载体的庞大的无线物联网,包括车辆内部各部件、车辆与车辆之间、车辆与路边基站之间的无线通信网络等,其网络架构如图1所示。根据通信距离划分,车辆通信网络主要包括车域网(VAN)和车辆自组网(VANET)两大类。车域网是指通过使用传感器、电子标签等,在移动车辆内部各部件之间构建无线局域网,并通过车载网关接入周边的无线广域网。它能使车辆内部及周围的设备直接或者间接通过无线协议进行通信。移动自组织网络(MANET)在交通道路上的应用被称之为车辆自组网,它为高速运动的车辆之间及运行在高速公路上的车辆提供了一种可能的高速率无线通信接入方式。
车载自组网简介
车载自组网是专门为车辆间通信而设计的自组织网络,它创造性地将自组网技术应用于车辆间通信,使司机能够在超视距的范围内获得其他车辆的状况信息(如车速、方向、位置、刹车板压力等)和实时路况信息。在2003年I1ru—T的汽车通信标准化会议上提出的车用自组织网络(VANET,vehicle ad-hocnetworks)技术。
自组网是一种无线分布式结构,强调的是多跳、自组织、无中心的概念。车载自组网的基本思想是在一定通信范围内的车辆可以相互交换各自的车速、位置等信息和车载传感器感知的数据,并自动的连接建立起一个移动的网络。节点的单跳通信范围只有几百米到一千米,每一个节点(车辆)不仅是一个收发器,同时还是一个路由器,因此采用多跳的方式把数据转发给更远的车辆。
车载自组网特点
车载自组网是极其特殊的移动自组织网络,它同样存在一般无线自组网所固有的问题,如隐藏点问题、暴露点问题、信道捕获问题等,不过也带有自身独特的特性。
车载自组网的主要特点包括:
①
由于节点高速移动性(速度大致在5-42m/s之间),导致网络拓扑结构变化快,路径寿命短,例如平均速度为100km/h的道路上,如果节点的覆盖半径为250m,则链路存在15s的概率仅为57%。
② 无线信道质量不稳定,受多种因素影响,其中包括路边建筑、道路情况、车辆类型和车辆相对速度等。
③ 节点通过发动机可以提供源源不断的电力支持,车辆的承载空间也可以确保天线的尺寸和其他额外的通信设备,同时还具有强大的计算能力和存储能力等。
④ 节点移动具有一定的规律性,只能沿着车道单/双向移动,具有一维性。
⑤ 道路的静态形状使得车辆移动是受限制的,车辆轨道一般可预测。
⑥ GPS能够为节点提供精确定位和精准时钟信息,利于获取自身位置信息和进行时钟同步。
⑦ GPS和电子地图相结合,利用路径规划功能,将使车载自组网路由策略的实现变得更为简单。
车载自组网组成及建构
车载自组网组成部分:车、设施(包括路边基站、信号灯等)、卫星(提供GPS定位服务)、互联网(实现部署功能)等。
VANET网络可能被通信运营商、内容服务商、政府机构部署,或者由他们联合部署,构成一个混合架构的无线通信网络。根据欧洲车载通信联盟(C2C-CC)的定义,VANET的架构已被拓展到更广泛的范畴,分为车内通信( In-vehicle domain)、车间通信(Ad-hoc domain)和车路通信(Infrastructure domain) 三个域。车内通信(In-vehicle) 是车载单元(OBU) 与用户终端之间的通信,用户终端可以是某种具体设备,也可以是集成于OBU的虚拟模块,连接方式可以有线或无线的。车间通信(Ad-hoc domain)包括OBU之间的通信(V2V)以及OBU与路侧单元RSU之间的通信(V2R),通信方式可以是单跳也可以是多跳的。车路通信(Infrastructure domain) 是0BU、 RSU与基础设施之间的通信,如Satellite、 Hot Spot、3G、4G等,完成接入互联网的功能。对于RSU来说,连接可以是有线的。
这三个域中可能采用的无线接入方式包括IEEE 802. 11p (Ad-hoc domain)、Cellular Networks (2G/3G/4G用于 infrastructure domain)、 WLAN (802. 11a//g/n/ac 用于Infrastructure domain 或in-vehicle domain),Bluetooth(in-vehicle domain)等。VANET的应用可能用到不只一种通信方式。
主流自组网通信方式
ZigBee
ZigBee是基于IEEE802.15.4标准的低功耗局域网协议。根据国际标准规定,ZigBee技术是一种短距离、低功耗的无线通信技术,其特点是近距离、低复杂度、自组织、低功耗、低数据速率。主要适合用于自动控制和远程控制领域,可以嵌入各种设备(物联网设备居多)。
ZigBee被标准化为IEEE 802.15.4,工作频段有三个:868MHz-868.6MHz、902MHz-928MHz和2.4GHz-2.4835GHz,其中最后一个频段世界范围内通用,16个信道,并且该频段为免付费、免申请的无线电频段。三个频段传输速率分别为20kbps,40kbps以及250kbps。
典型应用场景:物联网、智能家居
ZigBee优缺点:
优点:低功耗、低成本、近距离、短时延、网络容量大、高安全、免执照频段、工作频段灵活、数据传输可靠、自组网能力强、自恢复能力强
缺点:成本高(成本难以低于10美金)、通信稳定性差(国内Zigbee技术主要采用ISM频段中的2.5G频率,其衍射能力弱,穿墙能力弱)、数据传输速率低、有效范围小、抗干扰性差、ZigBee协议没有开源,以及和IP协议下的对接比较复杂等。
ZigBee三种网络架构:
从网络配置上,ZigBee网络中有3种类型的节点:ZigBee协调点、ZigBee路由节点和ZigBee终端节点.
ZigBee协调点是3种类型ZigBee节点最为复杂的一种,一般由交流电源持续供电。一个ZigBee网络只有一个ZigBee协调点,它往往比网络中其它节点的功能更强大,是整个网络的主控节点。它负责发起建立新的网络、设定网络参数、管理网络中的节点以及存储网络中节点信息等,网络形成后也可以执行路由器的功能。ZigBee路由节点可以参与路由发现、消息转发,通过连接别的节点来扩展网络的覆盖范围等。ZigBee终端节点(ZigBee
End Device, ZE)可以是全功能节点FFD或者精简功能设备RFD ( Reduced-Function Device ,RFD ),它通过ZigBee协调点或者ZigBee路由节点连接到网络,但不允许其他任何节点通过它加入网络,ZigBee终端节点能够以非常低的功率运行。
Zigbee可以形成星型拓扑、树型拓扑和网状拓扑三种网络,可以根据实际项目需要来选择合适的Zigbee网络结构,三种Zigbee网络结构各有优势。
星形拓扑是最简单的一种拓扑形式,它包含一个Coordinator(协调者) 节点和一系列的 End Device(终端)节点。每一个End Device 节点只能和 Coordinator 节点进行通讯。如果需要在两个 End Device 节点之间进行通讯必须通过Coordinator 节点进行信息的转发。
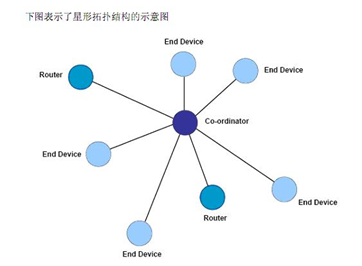
这种拓扑形式的缺点是节点之间的数据路由只有唯一的一个路径。Coordinator(协调者)有可能成为整个网络的瓶颈。实现星形网络拓扑不需要使用Zigbee 的网络层协议,因为本身IEEE 802.15.4的协议层就已经实现了星形拓扑形式,但是这需要开发者在应用层作更多的工作,包括自己处理信息的转发。
树形拓扑包括一个Coordinator(协调者)以及一系列的 Router(路由器) 和 End Device(终端)节点。Coordinator连接一系列的 Router 和 End Device,它的子节点的 Router也可以连接一系列的 Router 和End Device. 这样可以重复多个层级。树形拓扑的结构如下图所示:
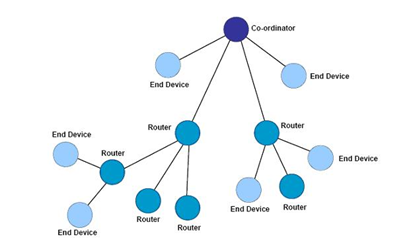
需要注意的是:Coordinator和 Router 节点可以包含自己的子节点;End Device 不能有自己的子节点;有同一个父节点的节点之间称为兄弟节点;有同一个祖父节点的节点之间称为堂兄弟节点。
树形拓扑中的通讯规则:每一个节点都只能和它的父节点和子节点之间通讯;
如果需要从一个节点向另一个节点发送数据,那么信息将沿着树的路径向上传递到最近的祖先节点然后再向下传递到目标节点。
这种拓扑方式的缺点就是信息只有唯一的路由通道。另外信息的路由是由协议栈层处理的,整个的路由过程对于应用层是完全透明的。
Mesh拓扑(网状拓扑) 包含一个Coordinator和一系列的Router 和End Device。这种网络拓扑形式和树形拓扑相同;请参考上面所提到的树形网络拓扑。但是,网状网络拓扑具有更加灵活的信息路由规则,在可能的情况下,路由节点之间可以直接的通讯。这种路由机制使得信息的通讯变得更有效率,而且意味这一旦一个路由路径出现了问题,信息可以自动的沿着其它的路由路径进行传输。网状拓扑的示意图如下所示:
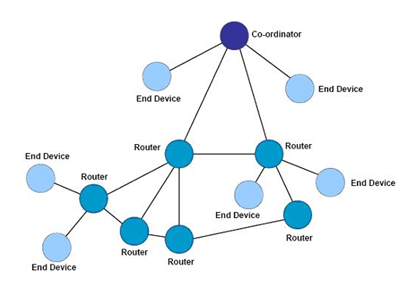
通常在支持网状网络的实现上,网络层会提供相应的路由探索功能,这一特性使得网络层可以找到信息传输的最优化的路径。 需要注意的是,以上所提到的特性都是由网络层来实现,应用层不需要进行任何的参与。
MESH网状网络拓扑结构的网络具有强大的功能,网络可以通过“多级跳”的方式来通信;该拓扑结构还可以组成极为复杂的网络;网络还具备自组织、自愈功能;而星型和树型网络适合多节点、距离相对较近的应用。
WIFI
Wi-Fi是一种无线局域网通信技术,全称Wireless-Fidelity,无线保真,IEEE组织的IEEE 802.11标准制定了以太网的技术标准。Wi-Fi终端指使用高频无线电信号发送和接收数据,使用以太网通信协议,通信距离通常在几十米。
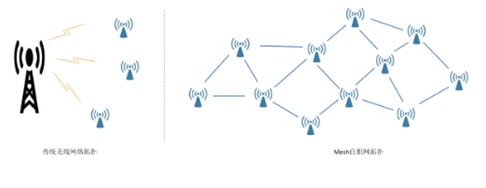
目前,基于WIFI的无线网状(Mesh) 组网技术不仅具有WIFI本身的优势,还解决了WIFI的覆盖范围小的问题,因此会有广泛的应用空间和很好的发展前景。
WIFI优缺点
优点:Wi-Fi的优点是局域网部署无需使用电线,降低部署和扩充的成本。另外,根据Wi-Fi联盟指定,“Wi-Fi认证”是向后兼容的,它指定一套全球统一标准:不同于移动电话,任何Wi-Fi标准设备将在世界上任何地方正确运行。
缺点:Wi-Fi的缺点是通信距离有限,稳定性差,功耗较大,组网能力差,安全性也较差。
WIFI两种扑形式
WIFI模块包括两种类型的拓扑形式:基础网(Infra) 和自组网(Adhoc) 。
AP,也就是无线接入点,是一个无线网络的创建者,是网络的中心节点。一般家庭或办公室使用的无线路由器就是一个AP;STA站点,每一个连接到无线网络中的终端(如笔记本电脑、PDA及其它可以联网的用户设备)都可称为一个站点。
基于AP组建的基础无线网络(Infra)
Infra也称为基础网,是由AP创建,众多STA加入所组成的无线网络,这种类型的网络的特点是AP是整个网络的中心,网络中所有的通信都通过AP来转发完成。
基于自组网的无线网络(Adhoc)
Adhoc也称为自组网,是仅由两个及以上STA自己组成,网络中不存在AP,这种类型的网络是一种松散的结构,网络中所有的STA都可以直接通信。
这两种模式的区别在于: Adhoc模式没有主设备,不通过无线AP或无线宽带路由直接通信,可以通过多张无线网卡之间使用相同的SSID (服务集标识)组成一个网络群体进行通信,因为无线网卡有软路由功能。Adhoc模式最多只能连接256台具有无线网卡的电脑。
基于WIFI的MESH自组网技术
MESH自组网是一种与传统无线网络完全不同的新型无线网络。它是一种动态地建立新的链接和其他节点相连的一项技术,它具有自组网、自修复、多跳级联、节点自我管理等优点,可以大幅降低网络部署的成本和复杂程度。
在使用Wi-Fi mesh网络之前,吞吐量是需要考虑的最重要因素之一。对于需要最高吞吐量和最快Wi-Fi速度的情况,传统的APs可能更适合。在mesh WiFi配置中,用户必须要考虑到从一个中继器到下一个中继器的巨大带宽损失;对于mesh APs之间的每一个无线链路,吞吐量都会比之前的AP下降50%左右,这就意味着mesh网络的网络吞吐量不会太大。
兼容性也是一个问题。尽管IEEE的802.11标准和Wi-Fi联盟的Wi-Fi Easy Mesh标准由来已久,但大多数mesh APs在不同的供应商之间并不兼容。所以,为了安全起见,坚持使用一个品牌,也许是同一种型号是有道理的。可以考虑在手边保留一些额外的mesh APs,用于替换或mesh扩展,以防将来无法购买该模型。
Blue Tooth
蓝牙(BlueTooth)是一种设备之间进行无线通信的技术,可实现固定设备、移动设备和楼宇个人域网之间的短距离数据交换,蓝牙可连接多个设备,克服了数据同步的难题。蓝牙使用短波特高频(UHF)无线电波,经由2.4至2.485GHz的ISM频段来进行通信,通信距离从几米到几百米不等。
蓝牙优缺点
优点 :
“低功耗蓝牙”模式下实现了低功耗,覆盖范围增强,最大范围可超过100米
支持复杂网络:针对一对一连接最优化,并支持星形拓扑的一对多连接等
智能连接:增加设置设备间连接频率的支持,Ipv6网络支持。
较高安全性:使用AES-128 CCM加密算法进行数据包加密和认证。
蓝牙模块体积很小,便于集成。
可以建立临时性的对等连接(Ad-hoc Connection):根据蓝牙设备在网络中的角色,可分为主设备(Master)与从设备(Slave)。
缺点:
蓝牙的各个版本不兼容,组网能力差;网络节点少,不适合多点布控。
连接到物联网的三种常见无线通信技术优缺点对比
蓝牙mesh
蓝牙mesh网络是2017年批准的蓝牙标准,这是一种组网技术,蓝牙4.0以上支持BLE低功耗的芯片都支持。蓝牙5.0是蓝牙的最新标准,主要是提高2倍的传输速度和4倍的传输距离,和蓝牙mesh是两个概念。
蓝牙mesh的网络节点类型如下图
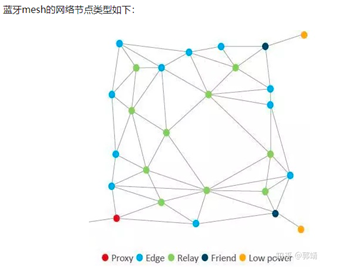
Proxy(代理节点):通过代理节点,手机和pad等支持蓝牙的设备可以访问网络中的每一个设备。
Edge(边缘节点):普通的节点,不支持中继等功能,只是普通收发数据。
Relay (中继节点) :可以作为消息的中继,转发给其他节点,本身也可以接受消息。
Friend+Low power节点:这两个节点是配合使用的,Friend节点可以缓存Low power节点的信息,这样low power节点可以处于休眠状态,定时唤醒,从Friend节点取回消息,满足低功耗的应用。
蓝牙Mesh与Zigbee不同,它不用路由协议,而是使用网络泛洪管理技术,简单说就是一个节点发出的数据,将会被所有支持中继的节点进行转发,但不会被无限转发,已经转发该数据的节点将不再进行转发,同时,蓝牙Mesh有一些特殊机制,比如数据包生存周期(Time To Live)管理,也是有效的防止了数据的无限转发。
蓝牙mesh的网络特点如下:
①网络无需中心节点
蓝牙Mesh与其他Mesh拓扑的很大不同,无需中心网关,节点与节点通信,节点的入网,均是通过配置实现
②节点信息,入网可配置
节点通过配置完成入网,无繁琐的入网交互流程及对应入网过程路由表的建立
③采用洪流(Flooding)模式进行通信
与一般的Mesh基于路由表通信相比,蓝牙Mesh利用广播+中继接收转发的机制,完成消息的传递;
④通信采用发布/订阅模型
节点发布信息,将消息发送至对应地址,订阅该地址的节点,将收到消息;这一特点,可以实现一对多的控制以及多对一的控制;比如一个开关可以控制三个灯泡,一个灯泡可以被三个开关控制。这个特性也是充分利用了蓝牙Mesh广播通信的优势;
⑤两重安全机制
蓝牙Mesh采取了应用层安全密钥及网络安全密钥,来保护网络的安全;网络安全密钥应用于整个网络,而应用层密钥则专门保护专门的终端节点;比如,灯控的消息可以被同一网络的开关,执行器等转发,而开关,执行器转发过程,无法解密具体的应用数据,即使同一网络,也无法实现灯的控制 (这加大了破解网络的难度)
⑥低功耗支持
针对低功耗如电池供电节点,可制定其他的节点作为低功耗节点的Friend节点,当低功耗节点进入睡眠后,Friend节点可以替代接收低功耗节点消息,并在低功耗节点唤醒后,将数据传递给低功耗节点;
⑦代理支持
针对已实现BLE 4.0/4.2协议的传统BLE设备,可通过代理节点,实现传统BLE节点加入Mesh网络;代理节点与传统BLE节点通过特定GATT Profile进行消息传递。
WiMAX
WiMAX的全名是微波接入全球互通(worldwide inter operability for micro wave access),用于推广基于IEEE 802.16和ETSI HiperMAN协议的无线宽带接入设备,目的是确保不同无线宽带接入设备之间的兼容性和互操作性。
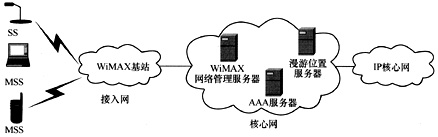
WiMAX系统的网络结构包括WiMAX终端、WiMAX无线接入网和WiMAX核心网3部分,如下图所示。根据所采用的标准以及应用场景不同,WiMAX终端包括固定(802.16-2004)、便携和移动(802.16e)三种类型。而WiMAX接入网主要指基站,需要支持无线资源管理等功能,有时为方便和其他网络互联互通,还需要包含认证和业务授权(ASA)服务器。而核心网主要用于解决用户认证、漫游等功能及作为与其他网络之间的接口。
WiMAX 技术为了提高移动 WiMAX系统性能,采用了许多先进关键技术,主要包括正交频分复用(OFDM)、正交频分多址(OFDMA)、混合自动请求重传(Hybrid Automatic Repeat Request,HARQ)、自适应编码(Adaptive Modulation and Coding,AMC),自适应天线系统(Adaptive Antenna System,AAS)和多输入多输出(Multiple Input Multiple Output,MIMO)等技术,这些技术应用于应急通信,可以有效的提升应急通信系统的性能,实现可视化通信。
典型应用场景:抢险救灾,随身WIFI
WiMAX特点
传输距离远:无线信号传输距离最远可达50km,并能覆盖半径达1.6公里的范围,是3G基站的10倍。
传输速率高:可实现高达74.
81Mb/s的传输速度。
容量高: WiMAX 的一个基站可以同时接入数百个远端用户站。
灵活的信道宽度: WiMAX 能在信道宽度和连接用户数量之间取得平衡,其信道宽度由1. 5MHz到20MHz不等。
QoS性能:可向用户提供具有QoS性能的数据、视频、话音业务。
丰富的多媒体通信服务:能够实现电信级的多媒体通信服务。
保密性:支持安全传输,并提供鉴权与数字加密等功能。
由于上述特点及其建网快、见效早的优点,WiMAX 具有重要现实意义与战略价值。
WiMAX组网技术
在 IEEE802.16-2004 协议中规定了两种组网模式即 PMP 模式和 Mesh 模式。PMP 模式即点到多点的组网模式,在目前的通信系统中被广泛使用。该组网方式必须包括一个基站和一些用户站,基站作为唯一主节点,所有用过站必须通过该主节点接入核心网。目前大规模使用蜂窝网络就是基于该组网模式。本组网模式具有技术成熟、搭建便捷、易于管理等诸多优点,是目前应用的主流技术。Mesh 是一种新型的组网模式,在网络中个能存在多个主节点,是一个无主的网络模型。网络中各用户节点可以通过多跳的方式接入能够使用的主节点。因此本组网方式具有很强的健壮性和灵活性。目前在军事领域已经开始得到运用。但是在协议中对于该组网方式并没有给出具体详细的定义只是在一些方面做了限制。目前在 Mesh 组网在路由协议等方面还不够成熟。IEEE802.16e 标准在 IEEE802.16-2004 的基础上增加了切换功能这样便可以提供移动服务。因此,采用 IEEE802.16e 组网可以增加对移动性宽带接入的支持,这在应急通信网络中的建设显得非常有必要。
移动 WiMAX 网络在实际组网时可以参考现有的 GSM/CDMA 蜂窝状网络。采用基于 IEEE802.16e 标准的网络可以为用户提供稳定、高质量的固定和移动的语音服务以及高带宽的移动数据业务。需要大规模组网时可以采用典型的 3 频点多基站移动组网方式。
DSRC
DSRC(Dedicated Short Range Communications)即专用短程通信技术,DSRC是一种高效的无线通信技术,提供高速的数据传输,并保证通信链路的低延时和低干扰。安装了车载单元(OBU)的车辆和路边单元(RSU),通过DSRC专用短程通信技术可实现车辆间通信(V2V)和车辆与路边基础设施通信(V2I)。DSRC是ITS标准体系框架中的重要组成部分,是整个智能交通服务系统的基础。DSRC可以实现在特定小区域内(通常为数十米)对高速运动下的移动目标的识别和双向通信,DSRC可实时传输图像、语音和数据信息,实现V2I、V2V及V2P的双向通信,DSRC广泛地应用在ETC不停车收费、出入控制、车队管理、信息服务等领域,并在车辆识别、驾驶员识别、路网与车辆之间信息交互、车载自组网等方面具备得天独厚的优势。
DSRC是国际上专门开发适用于车辆通信的技术,1992年由美国材料与试验协会(ASTM)最早提出。2010年7月正式颁布的IEEE
802.11p是IEEE 802.11协议在车辆领域的推广与扩充,主要规定了DSRC协议的媒体访问控制层(MAC)和物理层(PHY)标准。IEEE 1609标准则是以802.11p通信协议为基础的高层标准,是IEEE针对无线通信技术应用于车辆环境时所定义出的通信系统架构以及一系列标准化的服务和接口。
典型应用场景:高速公路ETC
DSRC优缺点
优点:
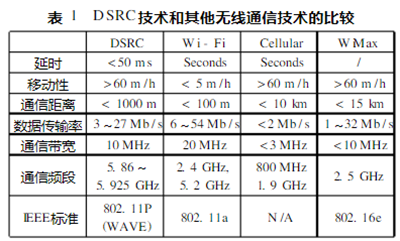
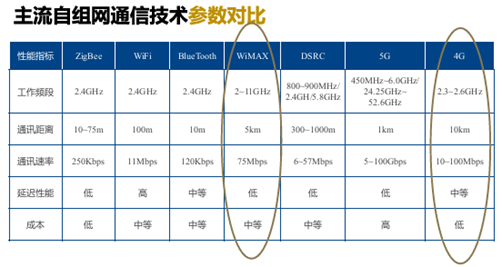
由上表可以看出DSRC在性能上优于WIFI、蜂窝网络等无线通信技术,跟WiMAX技术相比,在性能上不相上下,但是在实现的复杂度和成本上,DSRC远远比WiMAX具有优势。
缺点:
DSRC 技术也存在明显不足。首先是短距离覆盖问题。如果汽车通过DSRC网关接入互联网,会受到DSRC沿路边覆盖范围的约束,尤其是在高速公路上。即使通过多跳通信来扩展 DSRC 的覆盖范围,但也不能保证在任意时刻可以为车辆接入提供一条可用的链路。另外,即使链路存在,考虑到高速移动环境下复杂的网络拓扑结构,数据包的路由问题也是一个挑战。多级连跳通信以及路由问题大大降低了 DSRC 高可靠和低时延的性能。DSRC 的另外一个弊端就是基于 CSMA/CA(Carrier Sense Multiple Ac⁃cess with Collision
Detection)的接入技术。在高密度场景下,车辆之间的信道接入竞争会变得更加强烈,从而导致由高速数据传输碰撞以及信道接入延迟而引发的性能下降。除此之外,DSRC 难以实现大规模商用,其路边设施投入大,商业盈利模式不清晰,且DSRC 主要针对道路难以覆盖,无法满足车辆离路后获取服务的应用场景。
DSRC与C-V2X
DSRC在美国已经经过多年开发测试,后期随着蜂窝移动通信技术发展才出现了C-V2X(Cellular V2X,即以蜂窝通信技术为基础的V2X)技术。
基于802.11p的DSRC技术的组网需要新建大量路侧单元roadside unit,这种类基站设备的新建成本较大,其硬件产品成本也比较高昂。而C-V2X直接利用现有蜂窝网络,使用现有基站和频段,组网成本明显降低。由于随着蜂窝通信技术的发展,我国在LTE布局多年,网络覆盖全国大部分地区,是全球最大的LTE市场,5G通信将2020年开始商用,所以在中国市场C-V2X应用更加广。
4G/5G
进入21世纪后,蜂窝移动通信得到了快速的发展,技术水平和行业生态都飞速进步。于是,人们开始研究使用蜂窝通信技术(Cellular),用于车联网通信。目主流的蜂窝通信技术标准是4G LTE及5G。
LTE-V2X是给车联网量身定制的LTE。LTE-V2X依托现有的LTE基站,避免了重复建设,而且工作距离远比DSRC大,提供了更高的带宽,更高的传输速率,更大的覆盖范围。

LTE-V2X技术包括集中式(LTE-V-Cell)和分布式(LTE-V-Direct)两个工作模式。LTE-V-Cell需要基站作为控制中心,实现大带宽、大覆盖通信,而LTE-V-Direct可以无需基站作为支撑,可直接实现车辆与车辆,车辆与周边环境节点的可靠通信。
LTE-V2X和DSRC进行对比时,有一项指标,LTE-V是不如DSRC的,那就是时延。时延在车联网里,就意味着生死。所以,如果要支持远程驾驶或自动驾驶,这个网络的时延,必须是个位数的毫秒级(ms)。
LTE做不到,但是5G作为LTE的演进,可以做到。5G的时延,可以达到1ms,足以满足要求。LTE会演进到5G,LTE-V就演进为5G NR-V2X。除了时延之外,5G还拥有很多LTE不具备的优点——它拥有更高的带宽,支持更大数量的连接,还支持更高的移动速度。
LTE-V2X与5G -V2X关系
C-V2X目前主要包括LTE-V2X和5GNR-V2X两个大的标准阶段,其中LTE-V2X标准在3GPP的R14、R15中完成,NR-V2X标准则在3GPP的R16、R17中完成。
LTE-V2X经历了R14和R15两个版本的迭代之后已经趋于成熟。而在R16标准中,NR-V2X与LTE-V2X是互补的关系,不是替代关系,且在标准规范中已制定了两者在设备内如何共存,这意味着两者是长期共存的(R16标准冻结的同时,3GPP已经启动了R17研究工作)。
参考文献
https://wenku.baidu.com/view/6e40089264ce0508763231126edb6f1aff00710f.html
http://www.elecfans.com/baike/qichedianzi/cheshendianzixitong/20110706205228.html
https://wenku.baidu.com/view/b581c30302d276a201292e31.html
http://www.elecfans.com/baike/tongxingjishu/wuxiantongxin/20171106575784.html
https://www.21ic.com/iot/net/TD-LTE/201905/893419.htm
https://www.21ic.com/article/877916.html
https://wenku.baidu.com/view/1c23630b6c85ec3a87c2c51c.html
https://www.iiot.com/news/154.html
http://www.elecfans.com/tongxin/201910291100300.html
https://my.oschina.net/ssdlinux/blog/3009020
https://zhuanlan.zhihu.com/p/52692110
https://www.eefocus.com/communication/215580
https://wenku.baidu.com/view/ce50e1d63186bceb19e8bb93.html
https://zhuanlan.zhihu.com/p/24073800
https://www.zte.com.cn/china/about/magazine/ztecommunications/2011/3/cn_665/234823.html
https://wenku.baidu.com/view/7f8ec6333968011ca30091c4.html
https://zhuanlan.zhihu.com/p/144150064
https://www.ednchina.com/news/20171018V2X.html
https://zhuanlan.zhihu.com/p/51408781
https://zhuanlan.zhihu.com/p/61919647
http://www.cena.com.cn/infocom/20200712/107771.html
最后
以上就是无心雪糕最近收集整理的关于无人驾驶时代的室外组网技术研究的全部内容,更多相关无人驾驶时代内容请搜索靠谱客的其他文章。








发表评论 取消回复