1 简介
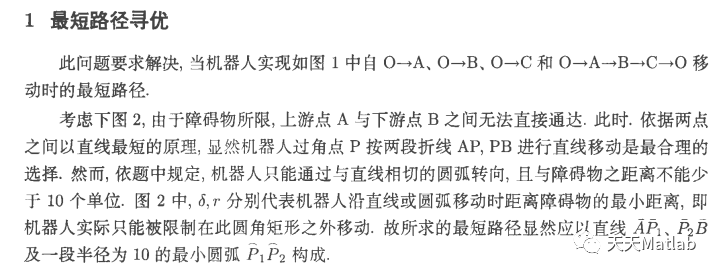
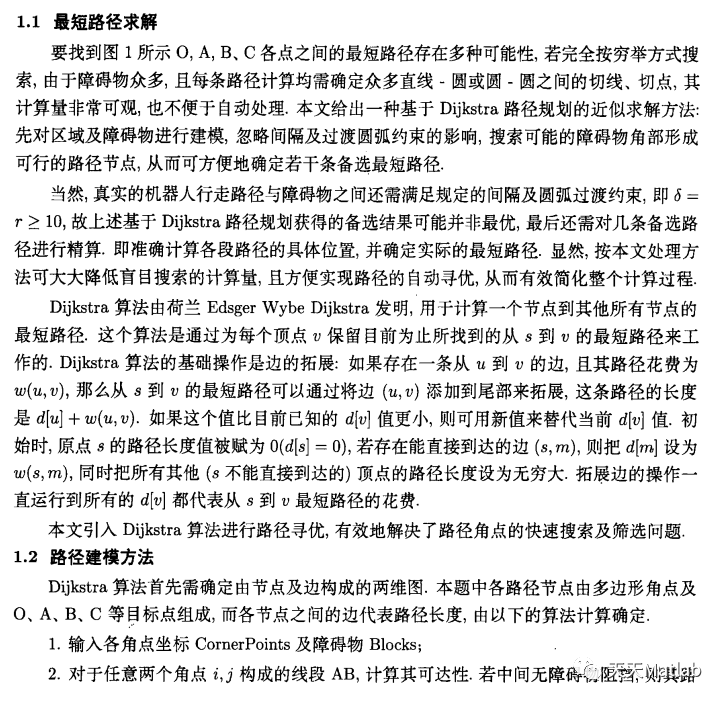
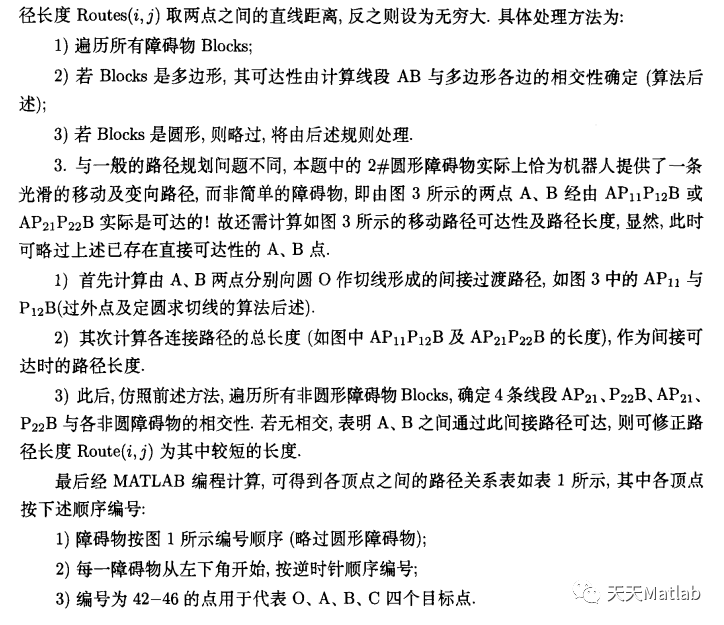
移动机器人的避障问题是移动机器人控制领域的研究热点。针对给定的移动机器人避障问题 , 探讨了最短路径及最短时间路径的路径规划问题。对于最短路径问题 ,建立 了简化的路径网格模型 ,将其抽象为由节点及边构成的两维图,再使用经典的Dijkstra算法获得可行的最短路径;对于最短时间路径问题 , 通过分析移动机器人弯道运行的速度曲线, 基于几何方法得出了移动时间与过渡圆弧圆心之间严格的数学关系 , 此后借助matlab优化函数获得最佳的移动路径算法可为类似机器人避障问题的解决提供借鉴。
2 部分代码
cmap = [1 1 1; ...0 0 0; ...1 0 0; ...0 0 1; ...0 1 0; ...1 1 0; ...0.9 0.9 0.9; %路径10.8 0.8 0.8; %路径20.7 0.7 0.7; %路径30.6 0.6 0.6; %路径40.5 0.
最后
以上就是感性舞蹈最近收集整理的关于【多机器人路径规划】基于Dijkstra算法实现多机器人路径规划问题附matlab代码的全部内容,更多相关【多机器人路径规划】基于Dijkstra算法实现多机器人路径规划问题附matlab代码内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。

![[论文]一种用于水下机器人分布式编队控制的自适应自组织神经网络方法](https://www.shuijiaxian.com/files_image/reation/bcimg17.png)






发表评论 取消回复