首先讲一下自动泊车和自主泊车的区别,自主泊车是自动泊车的高级形式,自动泊车仅仅是汽车找到车位后辅助驾驶者或者自动泊入停车位的过程,而自主泊车则是从汽车到达停车场到寻找车位、泊入车位都不需要人为干预,其智能程度远超自动泊车。而本文仅仅是对自动泊车中的路径规划算法进行介绍。
轨迹规划
轨迹规划的输入为车的位置、车位的位置和周围障碍物的位置,输出为泊车轨迹和泊车动作指令。
车辆运动模型
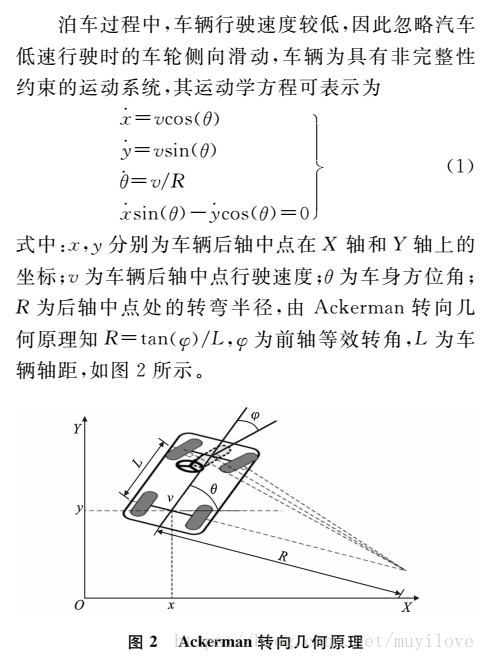
在低速倒车场景中,不考虑轮胎侧滑因素,车辆的运动轨迹仅与其前轮轴线中心点的转向角有关,而与泊车速度的大小无关,可以认为泊车的运动轨迹是由一个个圆弧组成。
圆弧直线法

最后
以上就是合适招牌最近收集整理的关于自动泊车中的路径规划算法轨迹规划的全部内容,更多相关自动泊车中内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复