在Simulink中,对物理系统的数学模型进行建模和仿真是非常简单的。模型在Simulink中是以图形框图的方式表示,用户可以在提供的模型库中找到各种模块。使用Simulink进行动态系统分析的主要优点之一,它使我们能够快速分析复杂系统的响应,而这些系统可能很难分析。Simulink能够从数学上近似解决我们无法或难以手动解决的数学模型。
通常,可以从物理定律中得出关于给定系统的数学方程,它是Simulink建模的基础。本次教程中,我们将演示如何导出数学模型,然后在Simulink中实现该模型。
文章目录
- 火车系统
- 受力分析和牛顿第二定律
- 构建Simulink模型
- 仿真模型
火车系统
在这个示例中,我们将考虑由引擎和车厢组成的玩具火车。假设火车仅在一个维度上(沿着轨道)行驶,我们希望对火车进行控制,使其平稳的启动和停止,并在稳定状态下具有最小的误差来跟踪给定速度。
火车头和车厢的质量分别用
M
1
M_1
M1 和
M
2
M_2
M2 表示。此外,火车头和车厢通过具有刚度
k
k
k 的联轴器连接。换句话说,将联轴器可以等效成弹簧常数为
k
k
k 的弹簧来建模。
F
F
F 表示火车头的牵引力,而
μ
mu
μ 表示滚动摩擦系统。

受力分析和牛顿第二定律
推导控制物理系统的数学方程式的第一步就是绘制系统的受力图,以下是针对我们的火车系统的分析:
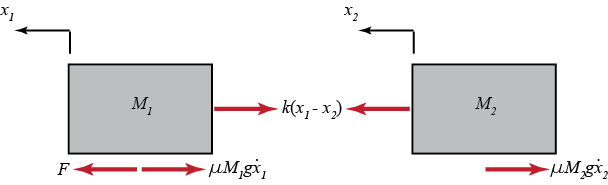
根据牛顿第二定律,我们知道作用在物体上的合力等于物理质量及其加速度的乘积。在这种情况下,水平方向上作用在火车头
M
1
M_1
M1 上的力由牵引力,弹力,摩擦力组成,作用在车厢
M
2
M_2
M2 上的力由弹力和摩擦力组成。在垂直方向上,重力和地面施加的法向力 (N=mg)平衡。因此,在最值方向上没有加速度。
我们将弹簧建模为弹力与形变成线性比例的关系。即
k
(
x
1
−
x
2
)
k(x_1-x_2)
k(x1−x2),其中
x
1
x_1
x1 和
x
2
x_2
x2 分别是火车头和车厢的位移。这里假设当
x
1
x_1
x1 和
x
2
x_2
x2 等于零时,弹簧没有形变。将摩擦力建模成与速度和法向力(等于重力)的乘积成线性比例的关系。
根据上述受力分析,在水平方向上应用牛顿第二定律可以得出以下列车系统控制方程:
Σ
F
1
=
F
−
k
(
x
1
−
x
2
)
−
μ
M
1
g
x
˙
1
=
M
1
x
¨
1
Sigma F_1 = F - k(x_1 - x_2) - mu M_1 g dot{x}_1 = M_1 ddot{x}_1
ΣF1=F−k(x1−x2)−μM1gx˙1=M1x¨1
Σ
F
2
=
k
(
x
1
−
x
2
)
−
μ
M
2
g
x
˙
2
=
M
2
x
¨
2
Sigma F_2 = k(x_1 - x_2) - mu M_2 g dot{x}_2 = M_2 ddot{x}_2
ΣF2=k(x1−x2)−μM2gx˙2=M2x¨2
构建Simulink模型
我们将构建两个模型(每个质量一个),通过表达式
Σ
F
=
m
a
Sigma F = ma
ΣF=ma 或
a
=
(
Σ
F
)
/
m
a=(Sigma F)/m
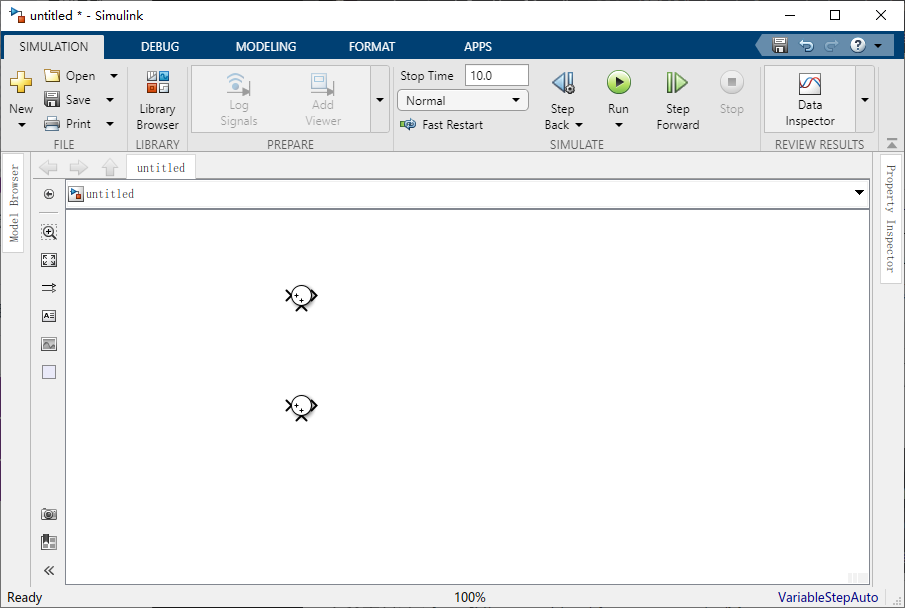
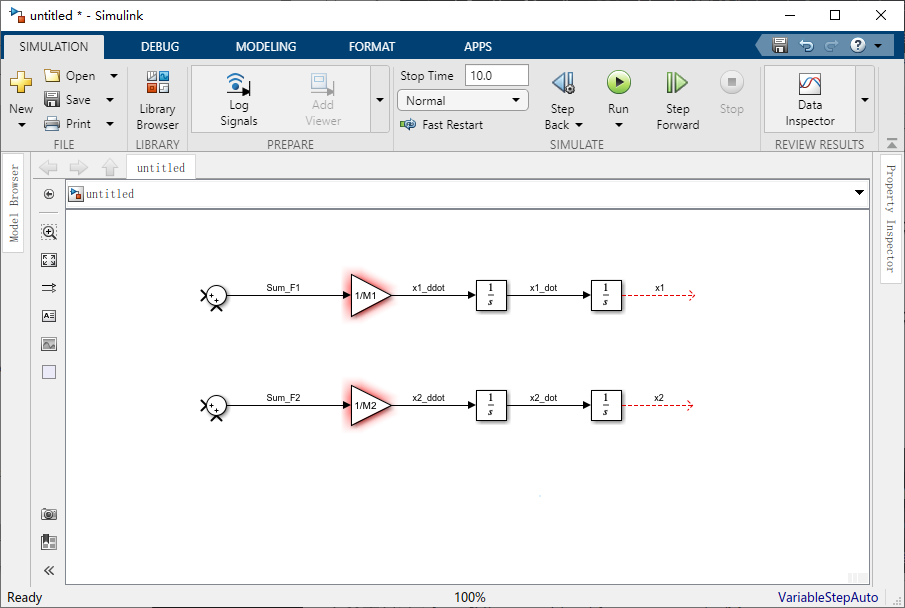
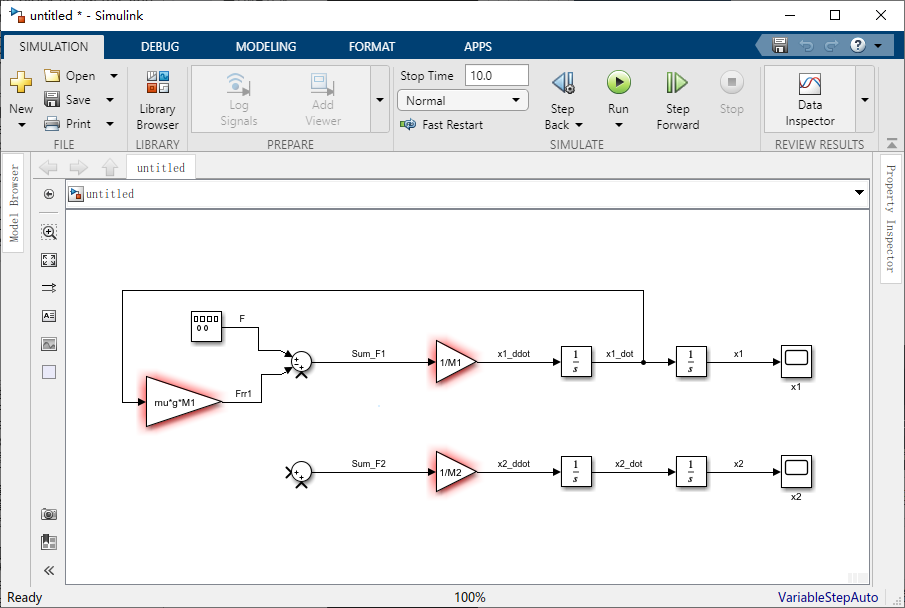
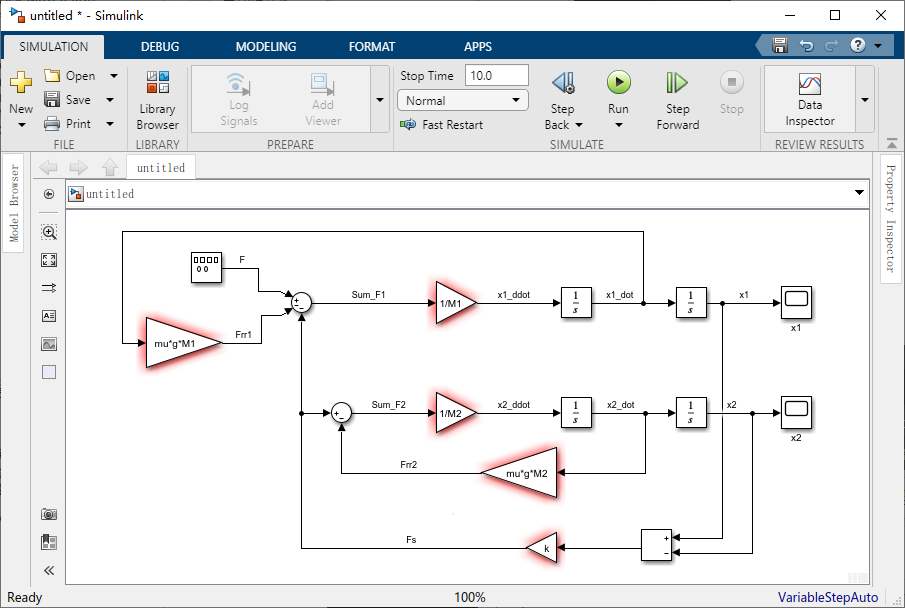
a=(ΣF)/m。首先,打开Simulink并新建一个模型窗口,然后将两个求和模块(Math Operations库)拖到窗口中,并将它们放置在合适的位置,如下所示:
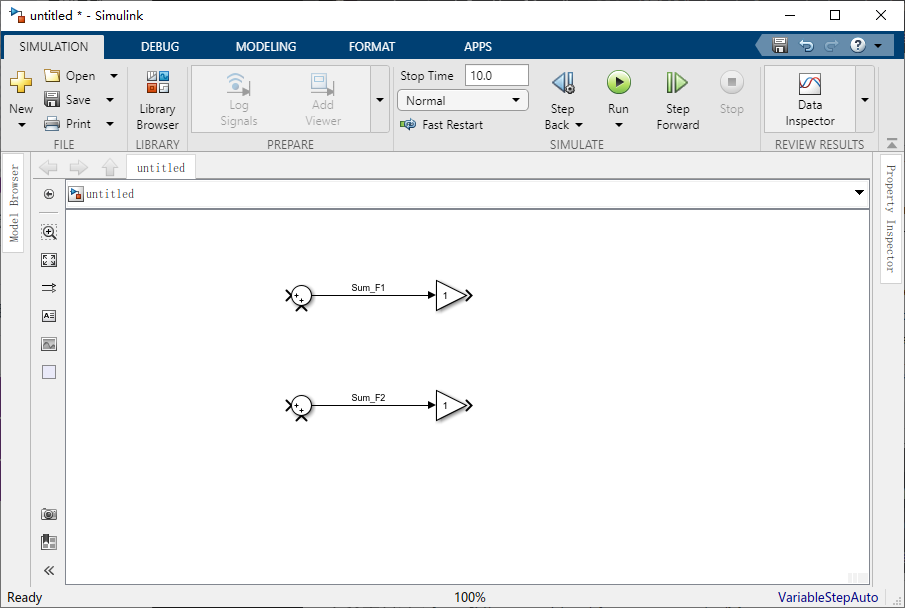
这些 sum模块中每个模块的输出表示作用在每个质量上的力之和。将每个输出信号乘以
1
/
M
1/M
1/M 将得到每个质量块相应的加速度,现在,将两个 “Gain” 模块(Math Operations库)拖到窗口中,并在其中一个 “Sum” 模块的输出处添加标签 “Sum_F1” 和 “Sum_F2”,模型看起来会更加清晰,通过双击两条信号线并输入所需要的标签来完成这个操作。
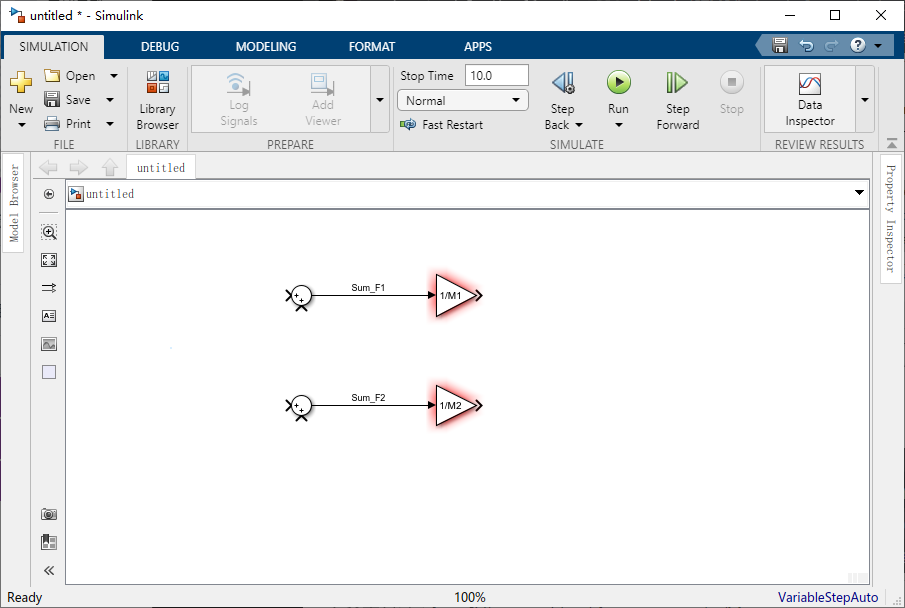
将这些增益模块默认的 K 更改为对应的质量块
1
/
M
1/M
1/M ,我们在MATLAB工作区中定义变量 M1 和 M2。因此我们只需要在每个增益模块中输入相应的变量名称即可。双击上方的增益模块,然后再 “Gain” 字段中输入 “1/M1” 和 “1/M2”。
你会注意到修改后,“Gain” 有一层红色,这是没有定义 M1 和 M2。后续赋值后这个就会消失。
这个“Gain”模块输出的是每个物体(火车头和车厢)的加速度,我们上面推导的控制方程式取决于物体的速度和位移。由于可以通过积分加速度来获得速度,而我们再积分速度来获得位置,因此我们可以使用积分器模块来生成这些信号。从 Continuous库中将拖动四个Integrator模块到窗口中。
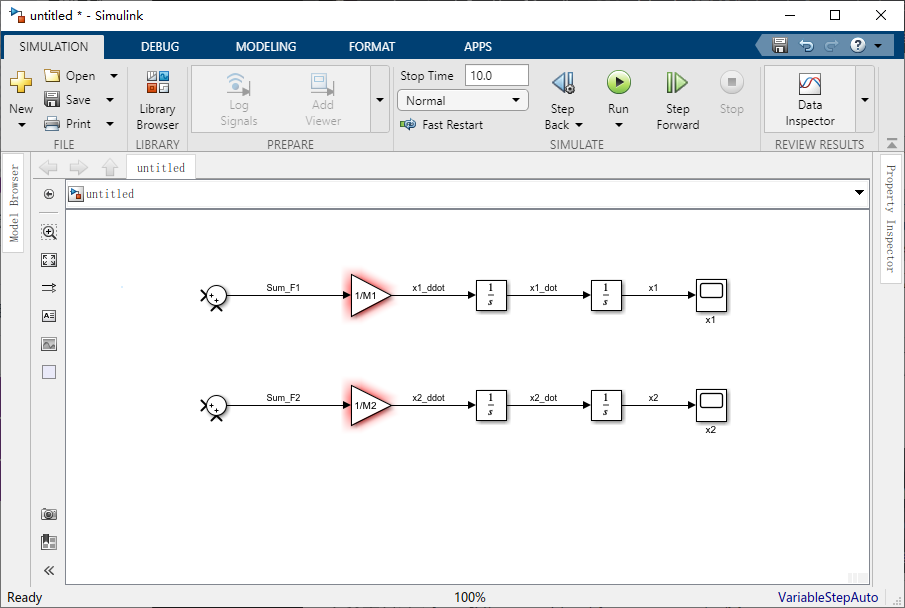
现在,将两个 Scope 从Sinks库中拖动到窗口中,并连接到这些积分器的输出,将它们分别标记为 “x1” 和 “x2”。
现在我们准备添加每个物体上的作用力。首先,我们需要调整每个 “Sum” 模块上的输入来表示作用力的个数。由于总共有三个作用在火车头上的力,双击相应的 “Sum” 模块并将 “List of signs” 字段更改为 “|+++”。符号 “|” 用作隔离。只有两个力作用在车厢上,因此我们不用考虑 “M2” 的 “Sum” 模块。
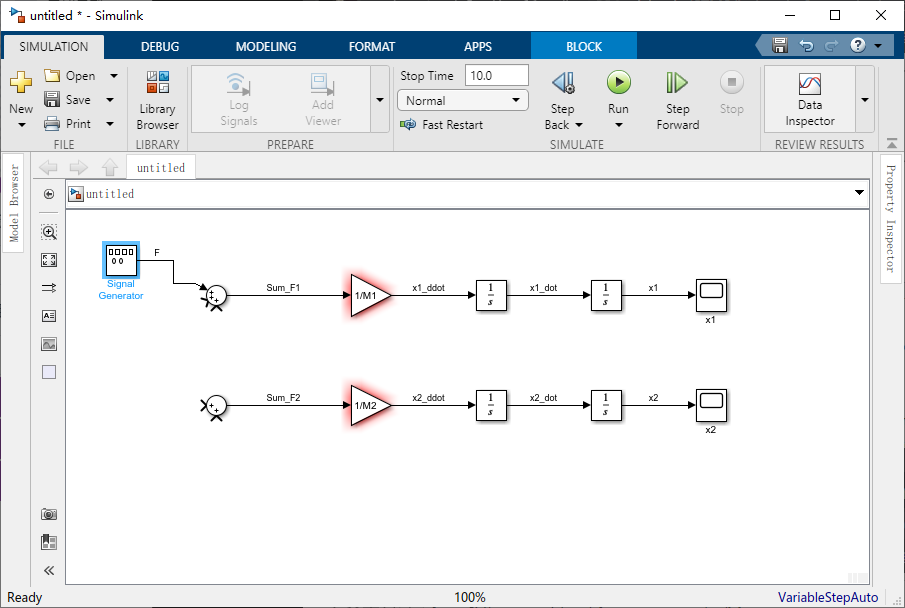
作用在火车头上的第一个力就是牵引力
F
F
F 。 从 Sources库中拖动一个 Signal Generator模块到窗口中,并将其连接到相应的 Sum模块的最上面输入,该信号标记为 “F”。
作用在火车头上的下一个力是摩擦力,回想一下,摩擦力的建模如下:
F
r
r
,
1
=
μ
g
M
1
x
˙
1
F_{rr,1} = mu g M_1 dot{x}_1
Frr,1=μgM1x˙1
为了产生这个力,我们可以提取速度信号并乘以适当的增益。将一个增益模块拖到窗口中,并拉出 “x1_dot” 信号,并将其连接到该新的增益模块的输入,将增益模块的输出连接到 “Sum” 的第二个输入。双击新的 “Gain” 输入 mu*g*M1。由于摩擦力是负,所以将 “Sum”的符号改成 “|±+”。并将新的 “Gain” 输出标记成 “Frr1” 。
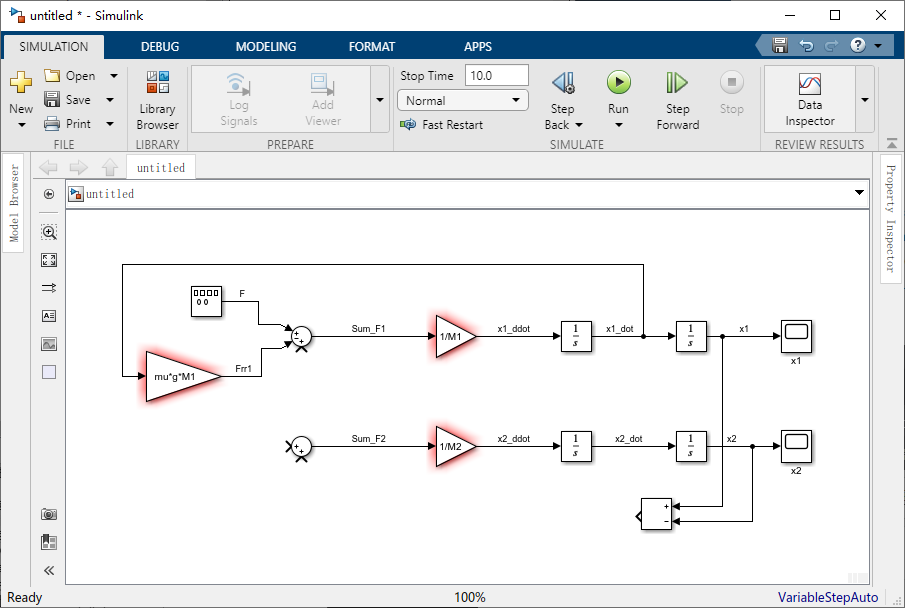
作用在火车头上的最后一个力是弹力,回想一下,弹力的建模为
F
s
=
k
(
x
1
−
x
2
)
F_s = k(x_1-x_2)
Fs=k(x1−x2)
因此,我们需要生成信号
x
1
−
x
2
x_1-x_2
x1−x2 ,然后可以将其乘以增益
k
k
k 来创建弹力。将减法模块(或求和模块或加法模块)拖到窗口中,为了更改该模块的方向,可以右击该模块,然后从出现的菜单Rotate & Flip > Flip block或者选中该模块,使用快捷键Ctrl-I。现在,将 “x2” 的信号连接到减法模块的负输入,同样,将 “x1” 的信号连接到减法模块的正输入。
现在,我们将这个差值乘以弹簧常数以产生弹力。将一个增益模块拖到窗口中,将增益模块的值改为 “k” ,并将减法模块的输出连到增益模块的输入。然后将增益模块的输出连接到火车头的求和模块的第三个输入,并标记信号 “Fs” ,由于弹簧力沿负方向作用在火车头上,因此有必要将 “Sum” 模块的符号改成 “|±-” 。
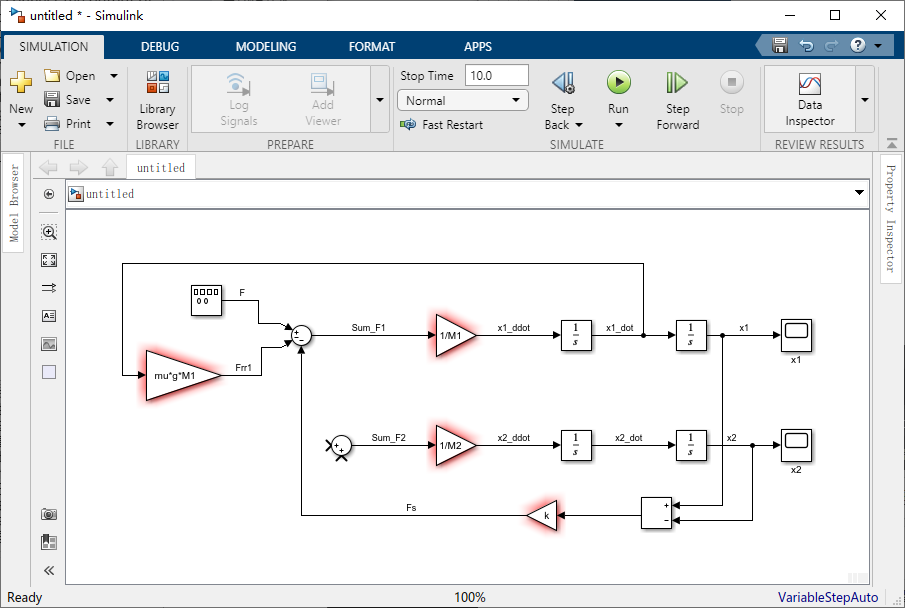
现在,我们可以对车厢施加作用里,对于第一个力,我们将使用刚产生的弹簧力。只是沿正方向施加到车厢上,只需将弹力 “Fs” 连接到车厢的 “Sum” 模块的第一个输入上。
施加到车厢上的第二个力是摩擦力,该力的产生与火车头类似,注意符号为负。
到此建模完成,我们只需要提供适当的输入并选择感兴趣的输出即可。系统的输入信号是火车头产生的力
F
F
F 。在Simulink模型中,我们已经将
F
F
F 定义为信号发生器模块的输出。我们将观察并最终尝试控制火车头的速度。从Sinks库向窗口中拖动一个 Scope。在 “x1_dot” 信号引出以根线,然后连接到Scope上,并标记为 x1_dot。
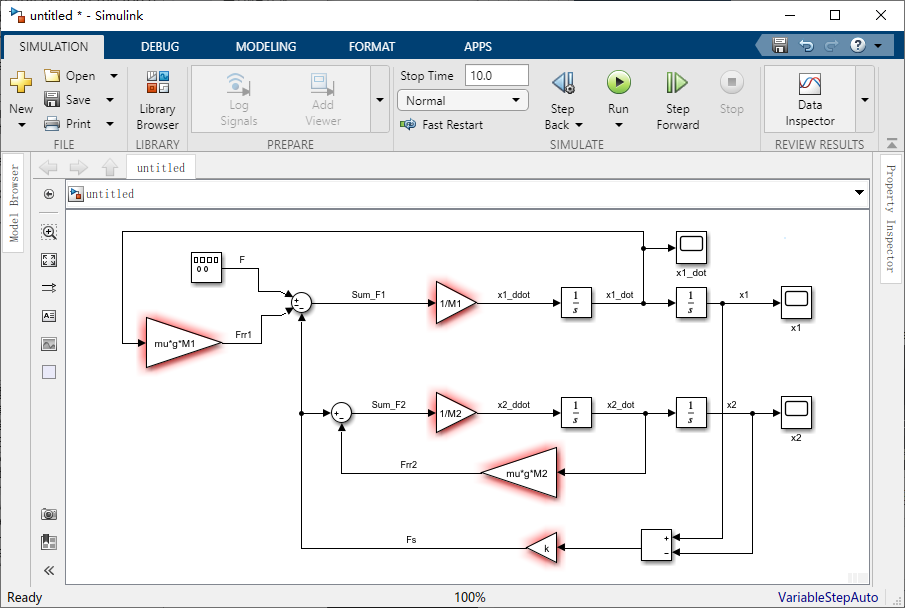
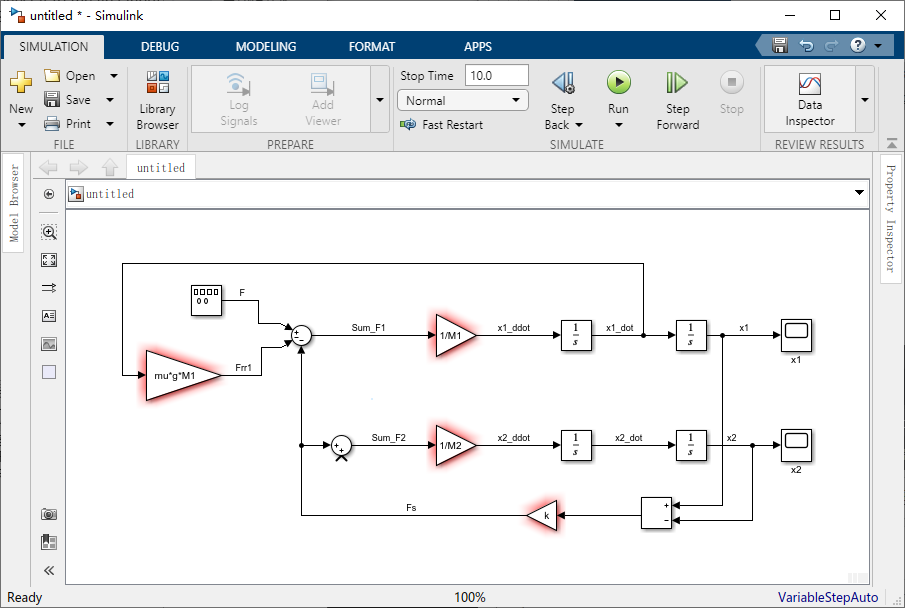
现在,模型已经完成,可以选择保存。
仿真模型
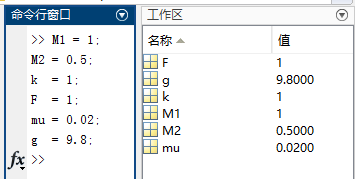
在仿真模型之前,我们需要对模型中使用的每个变量分配数值,对于火车系统,我们选择如下:
- M 1 M_1 M1 = 1 kg
- M 2 M_2 M2 = 0.5 kg
- k k k = 1 N/m
- F F F = 1 N
- μ mu μ = 0.02 s/m
- g g g = 9.8 m/s^2
M1 = 1;
M2 = 0.5;
k = 1;
F = 1;
mu = 0.02;
g = 9.8;
现在,我们需要为火车头提供适当的输入,双击信号发生器(输入“F”)。从“Wave form”中选择“square”,然后将“Frequency” 设置为 “0.001”,将单位设置为“Hertz”,另外还需要将 “Amplitude” 设置为 -1,注意设置为 -1 表示 方波先是正,后是负。
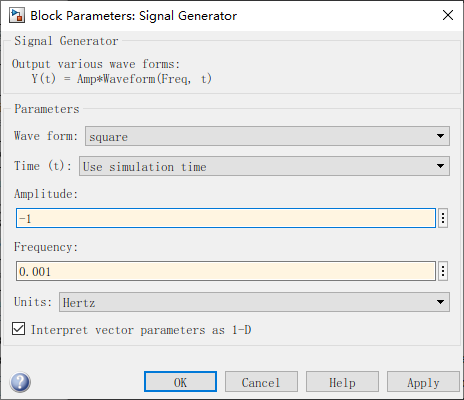
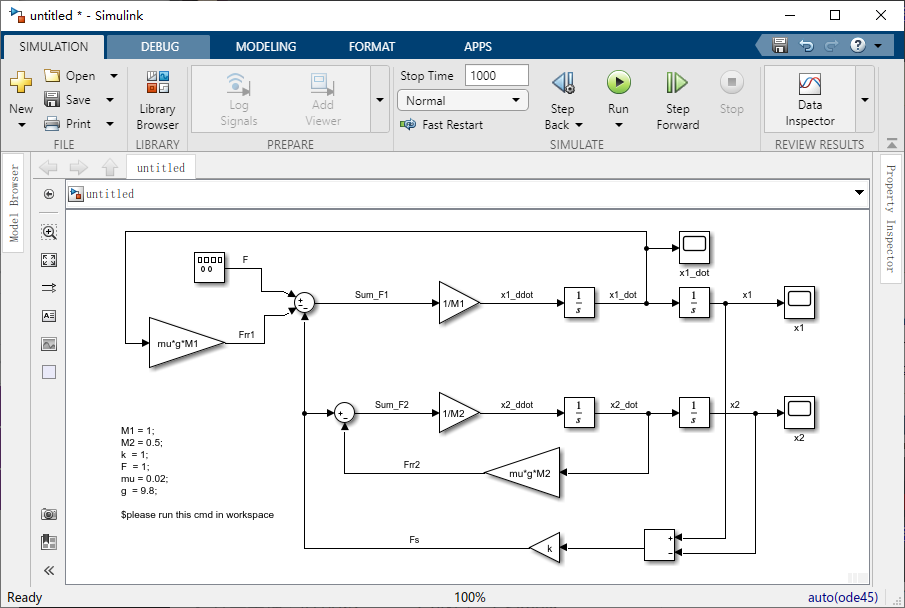
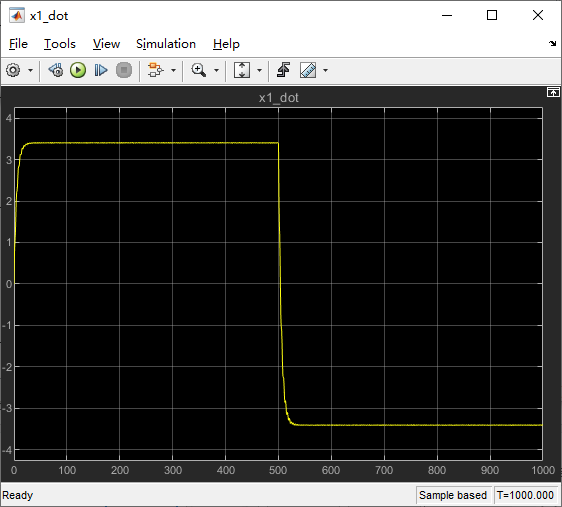
仿真运行之前的最后一个步骤选择适当的仿真时间。要查看 0.001 Hz 方波的一个周期。我们要进行 1000s 的仿真。从模型窗口的顶部将 Stop Time 设置为 1000。
现在,运行仿真,并打开 “x1_dot” ,可以看出速度先为正后为负。
在该教程中,我们从第一部分对火车系统进行了数学建模,然后再Simulink中搭建了模型框图,现在可以用Simscape替代Simulink进行物理建模,Simscape是Simulink新增的一个工具箱,它使用户可以直接用物理的模块(例如惯性,关节,电阻器或者电感器)来对系统进行建模。使用Simuscape可使用户仿真物理系统而无需导出控制数学方程式。
下一个教程,我们将为火车系统设计控制器。
最后
以上就是认真秀发最近收集整理的关于控制教程 —— 介绍篇:8.基于Simulink为火车系统建模的全部内容,更多相关控制教程内容请搜索靠谱客的其他文章。








发表评论 取消回复