人工智能&自动驾驶
人工智能的应用
深度学习,神经网络,机器学习可实现的内容
行人识别 行人检测 行人计数 车辆识别 车辆计数 ,手写数字识别,手写汉字识别,手写字母识别,图片识别,目标检测,水果识别,花卉识别,颜色识别,形状识别,手势识别,安全帽识别,情绪识别,行人识别,车辆识别,行人计数,车辆计数,火焰识别,烟雾识别,安全帽识别
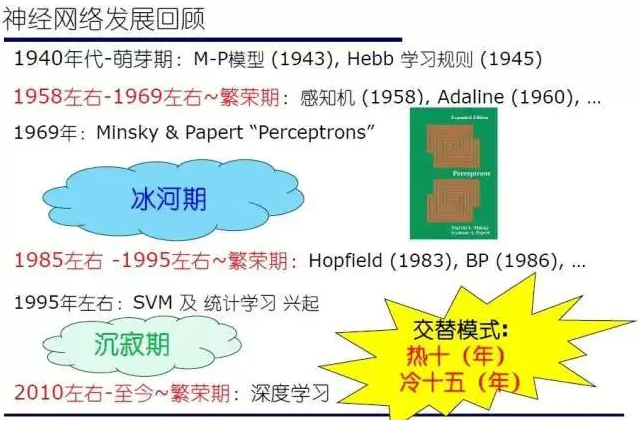
一 、神经网络的历史
神经网络的发展历史分成4个时期,启蒙时期(1890-1969),低潮时期(1969-1982),复兴时期(1982-1986),新时期(1986至今)
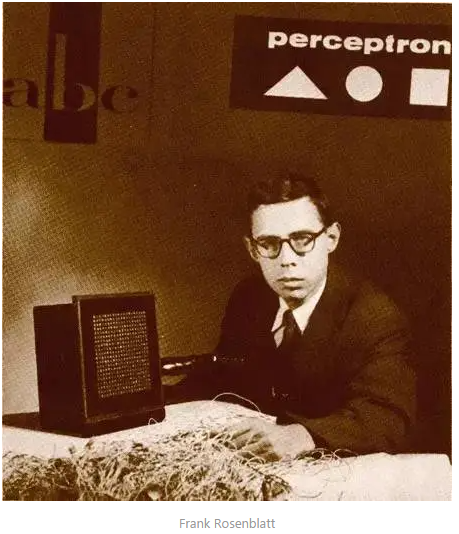
1958年,就职于Cornell航空实验室的Frank Rosenblatt发明了的一种称为感知器(Perceptron)的人工神经网络。它可以被视为一种最简单形式的前馈神经网络,是一种二元线性分类器(激活函数为sign(x))。感知机是人工神经网络的第一个实际应用,标志着神经网络进入了新的发展阶段。
感知器
1969年,Marvin Minsky 和 Seymour Papert 发表《Perceptrons: an introduction to computational geometry》一书,从数学的角度证明了单层神经网络具有有限的功能,甚至在面对简单的“异或”逻辑问题时也显得无能为力。此后,神经网络的研究陷入了很长一段时间的低迷期。

1974 年,Paul Werbos在哈佛大学攻读博士学位期间,就在其博士论文中发明了影响深远的著名BP神经网络学习算法。但没有引起重视。
1976年,美国Grossberg教授提出了著名的自适应共振理论ART(Adaptive Resonance Theory),其学习过程具有自组织和自稳定的特征。
1982年,David Parker重新发现了BP神经网络学习算法。
1983年,Hinton, G. E. 和 Sejnowski, T. J.设计了玻尔兹曼机,首次提出了“隐单元”的概念。在全连接的反馈神经网络中,包含了可见层和一个隐层,这就是玻尔兹曼机。
层数的增加可以为神经网络提供更大的灵活性,但参数的训练算法一直是制约多层神经网络发展的一个重要瓶颈。
神经网络由于其浅层结构,容易过拟合以及参数训练速度慢等原因,曾经火热的神经网络又慢慢的淡出了人们的视线。值得一提的是,1997年,Sepp Hochreiter和Jurgen Schmidhuber首先提出长短期记忆(LSTM)模型。
直到2006年,计算机处理速度和存储能力大大提高,为深度学习的提出铺平了道路.
二 、机器学习与 传统编程检测的不同
 人工编写检测规则
人工编写检测规则
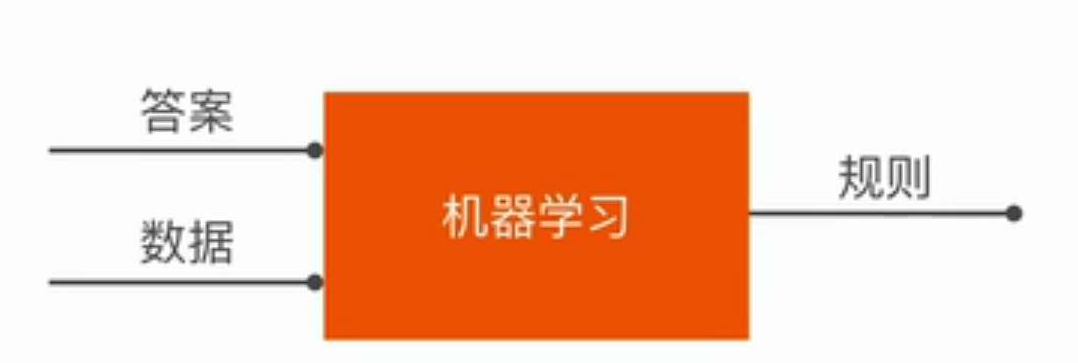
机器自动生成算法
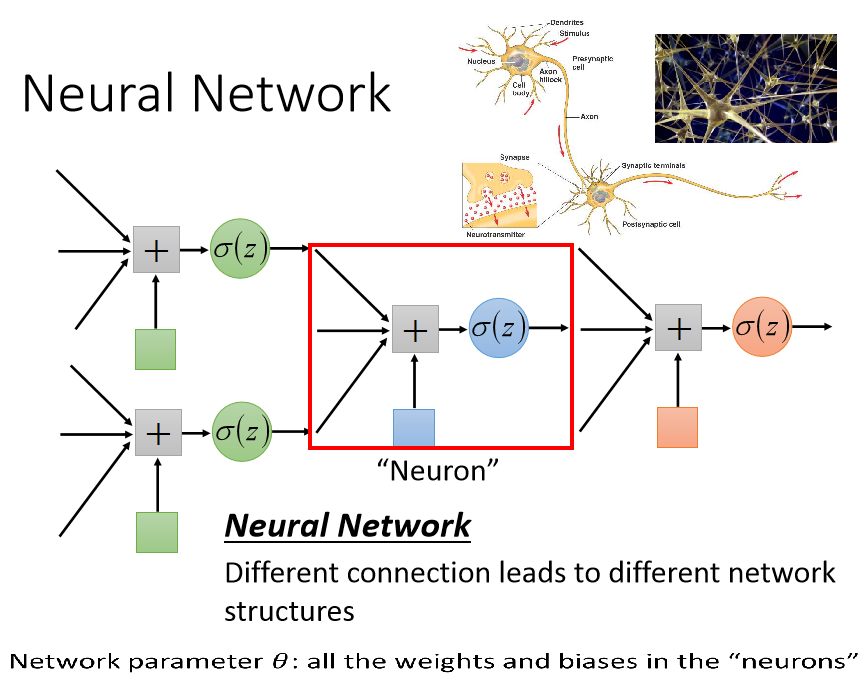
三、什么是神经网络
深度学习神经网络是基于 仿生学基础
但切法足够的底层理论支撑
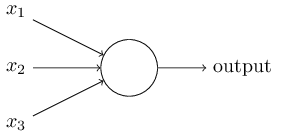
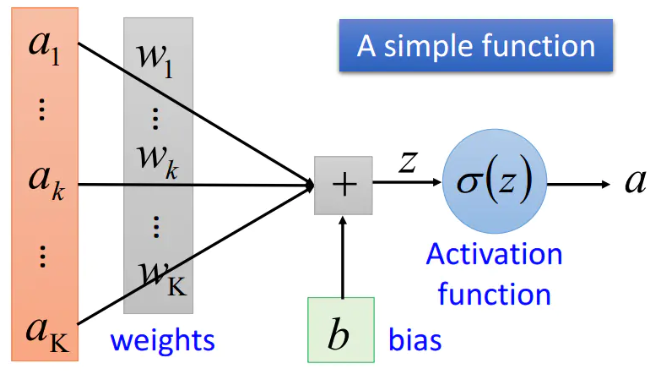
 神经元表达式
神经元表达式
z = a_1w_1+a_2w_2+a_iw_i+…+a_Kw_K+b
神经元的不同连接方式形成的网络架构也各不相同。神经网络的参数包括所有神经元的(weights)权重和(biases) 偏置。
如果说,一个神经元是一个简单函数$function,那么神经网络就是一个简单函数集
深度学习中的“深度”是指神经网络的层数有很多
一个深度神经网络识别手写体的例子
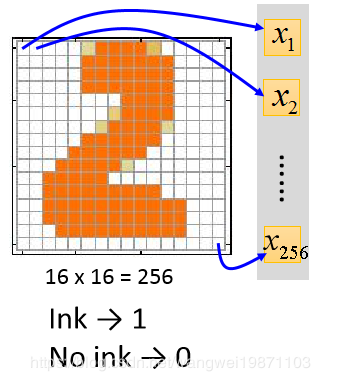
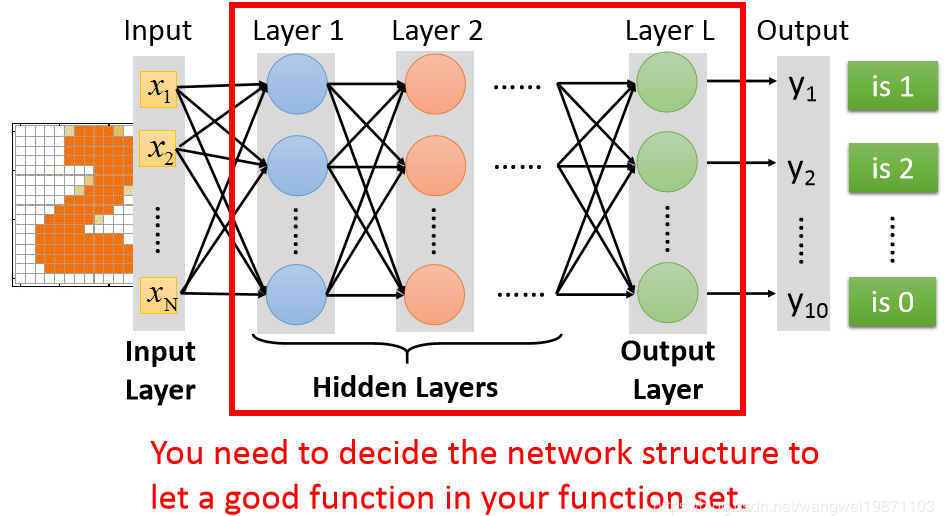

那么问题来了,隐藏层多少层好呢,每一层的神经元个数多少好呢,这个没有很准确的答案,很多的是根据经验试错和直觉得来的,也就是实际结果得出来的
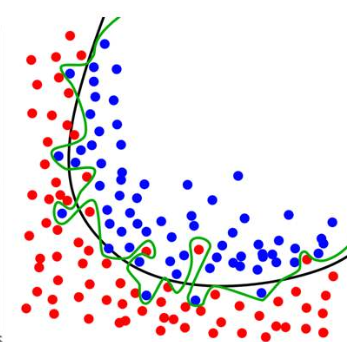
神经网络既不能欠拟合也不能过拟合
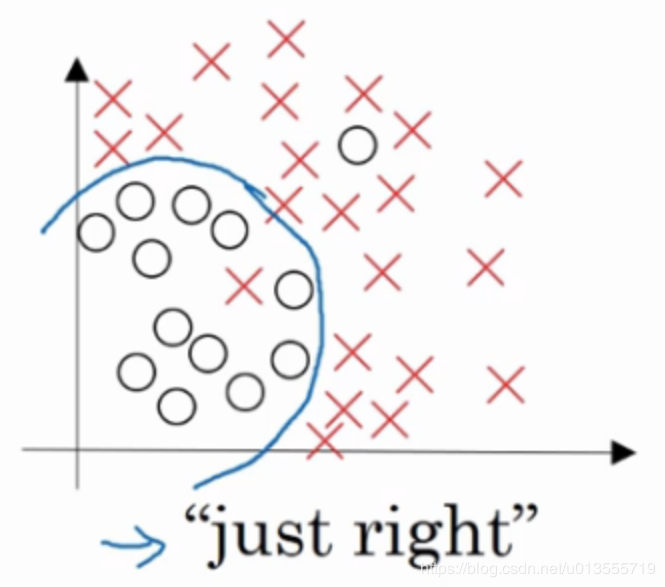
适度拟合
• 复杂程度适中,数据拟合适度的分类器,数据拟合程度相对合理,我们称之为"适度拟合"是介于过拟合和欠拟合中间的一类
#
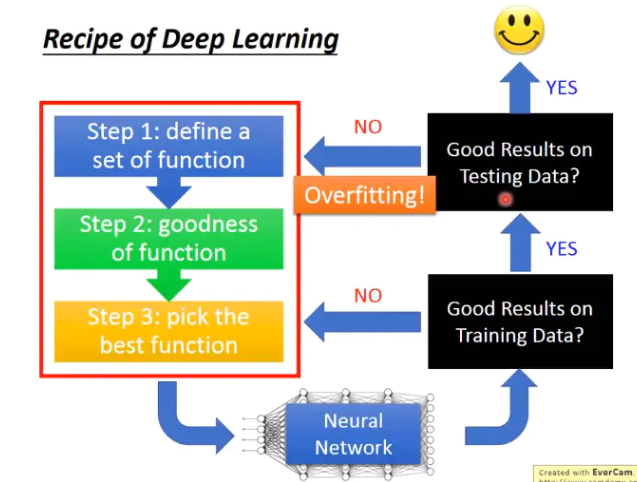
过拟合 : 在测试集上测试有很好的结果,但在数据集
我们需要修改直到我们在训练集上有比较满意的结果,然后我们才可以在测试集测试,如果测试集上是比较好的效果,那我们的模型训练至此结束,如果不行,那就是训练集好测试集不好,就是过拟合了,我们就需要从头开始从新考虑模型的创建,创建完毕后还是需要先考虑训练集,直至训练集和测试集双优
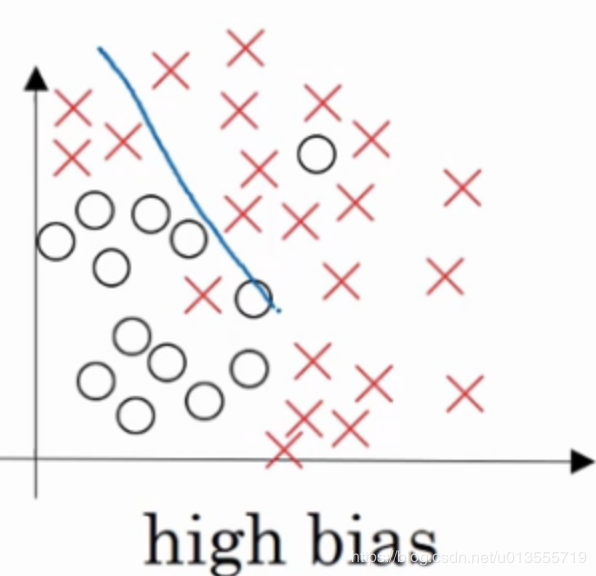
欠拟合
• "欠拟合(underfitting)"当数据不能够很好的拟合数据时,有较大的误差.
四、深度学习的基本方式
- 确定模型,从而确定函数映射空间;
- 将训练数据应用于函数空间,对模型进行训练;
- 找出最好的模型;
- 预测,我们可以将训练好的模型应用到unseen data上(这也是我们最终的目的)
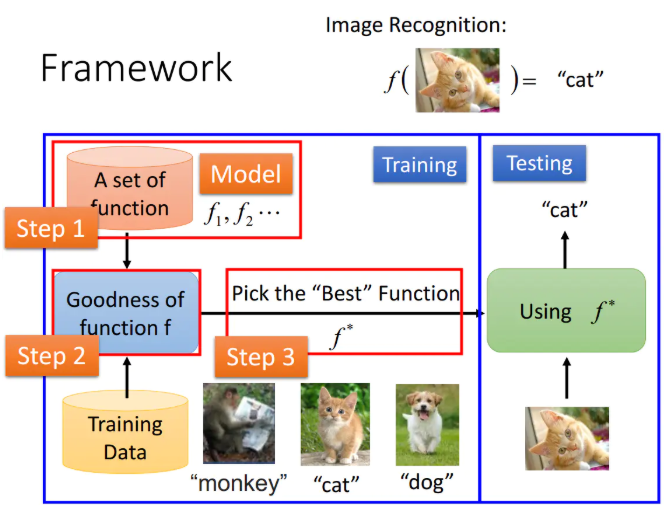
神经网络设计三步曲
1 定义一个功能
2 选择一个好的网络
3 选择最好的功能的网络
四、神经网络类型分类
DNN CNN RNN 三种
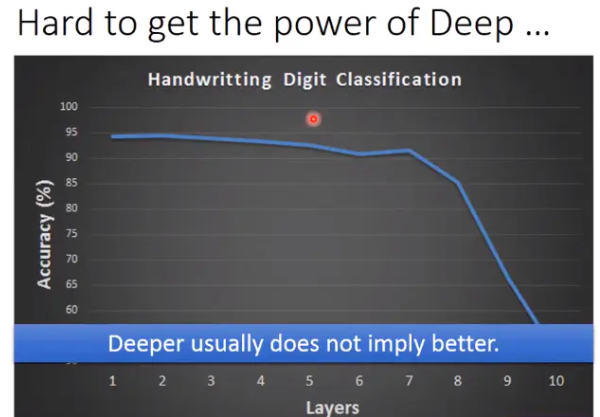
CNN的layer层数越深,得到的word Error就越低,因为层数越深,参数就会越多,同时就会得到更好的结果,但是层数量越多 ,越容易过拟合
1、网络层数不是越深越好
神经网络的胖矮和瘦高区别
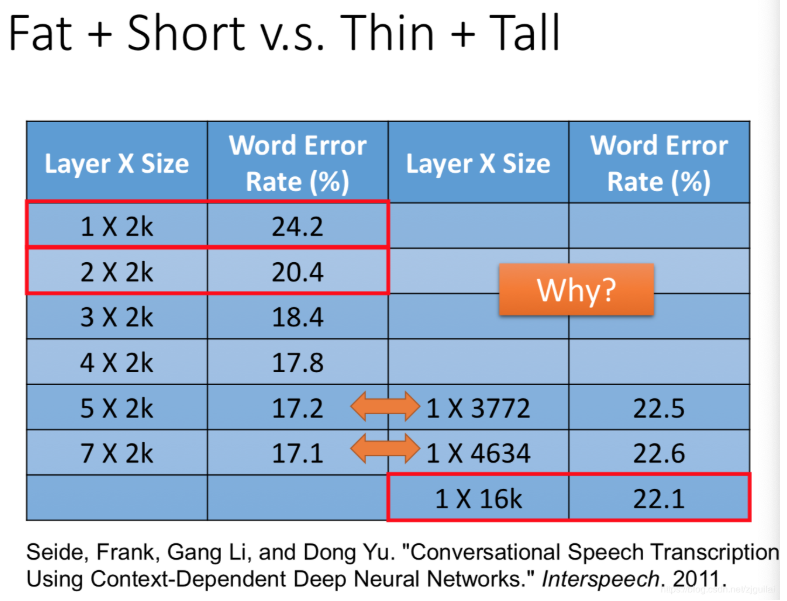
那么我们拿两个参数几乎一样的参数的cnn但是层数不一样,一个是高瘦,另一个是矮胖的比较哪个更好呢?例如: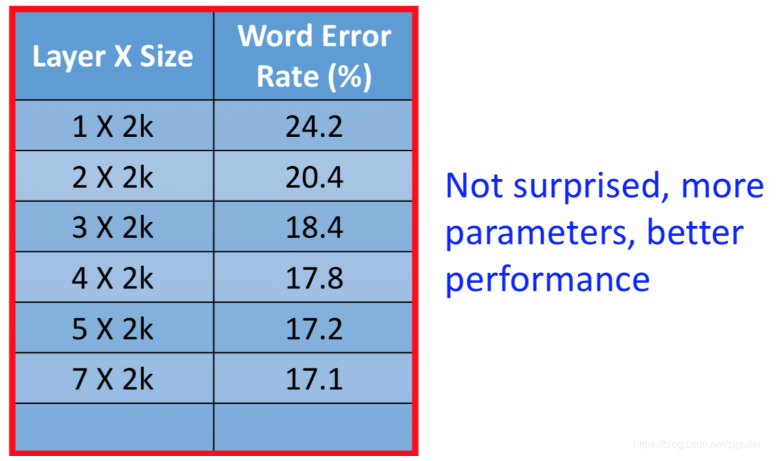
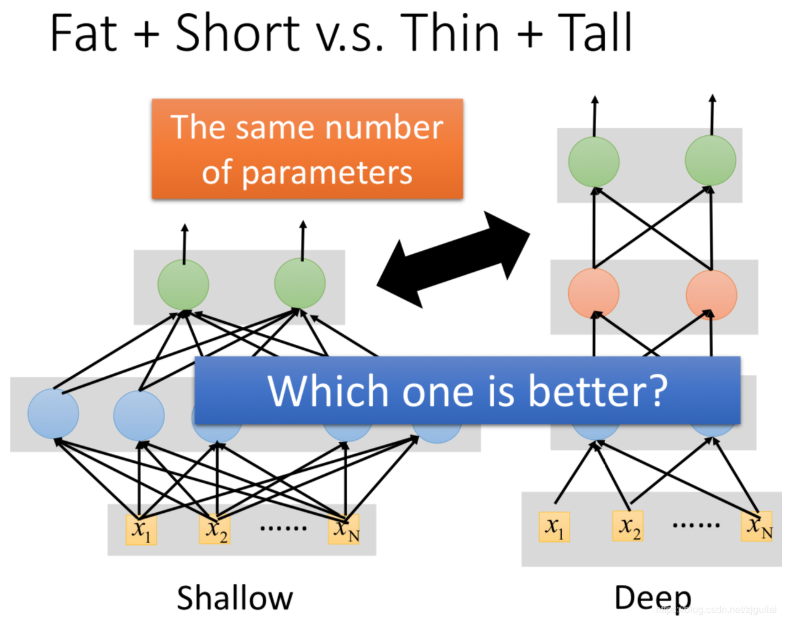
图中箭头双方模型的参数数目是接近的。我们会发现,一层的矮胖的network的performance的能力是有限的,那么怎么来衡量呢???为什么会这样子呢??
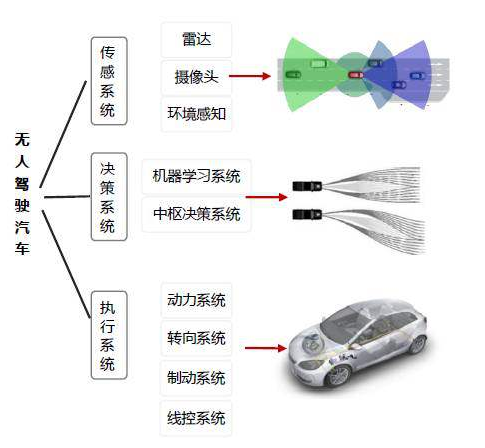
自动驾驶
通常来说,一辆无人驾驶汽车装备有许多不同类型的主传感器。每一种类型的传感器都各有优劣,因此,来自不同传感器的传感数据应该有效地进行融合。现在无人驾驶中普遍使用的传感器包括以下几种:
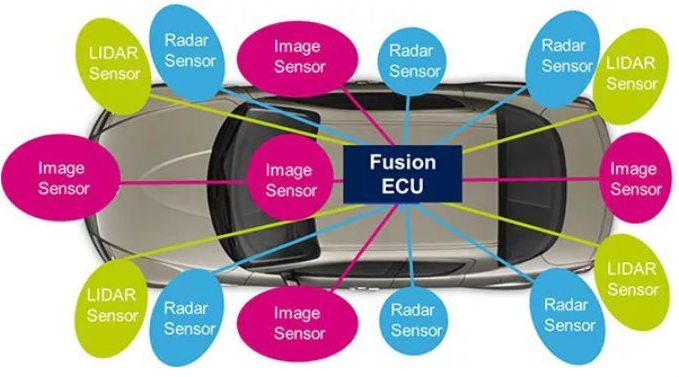
GPS/IMU、LIDAR、摄像头、雷达和声呐
通过高达200Hz频率的全球定位和惯性更新数据以帮助无人车完成自我定位。GPS是一个相对准确的定位用传感器,但是它的更新频率过低,仅仅有10Hz,不足以提供足够实时的位置更新。IMU的准确度随着时间降低,在长时间人并不能保证位置更新的准确性,但是它有着GPS所欠缺的实时性,IMU的更新频率可以达到200Hz或者更高。通过整合GPS与IMU,我们可以为车辆定位提供既准确又足够实时的位置更新。
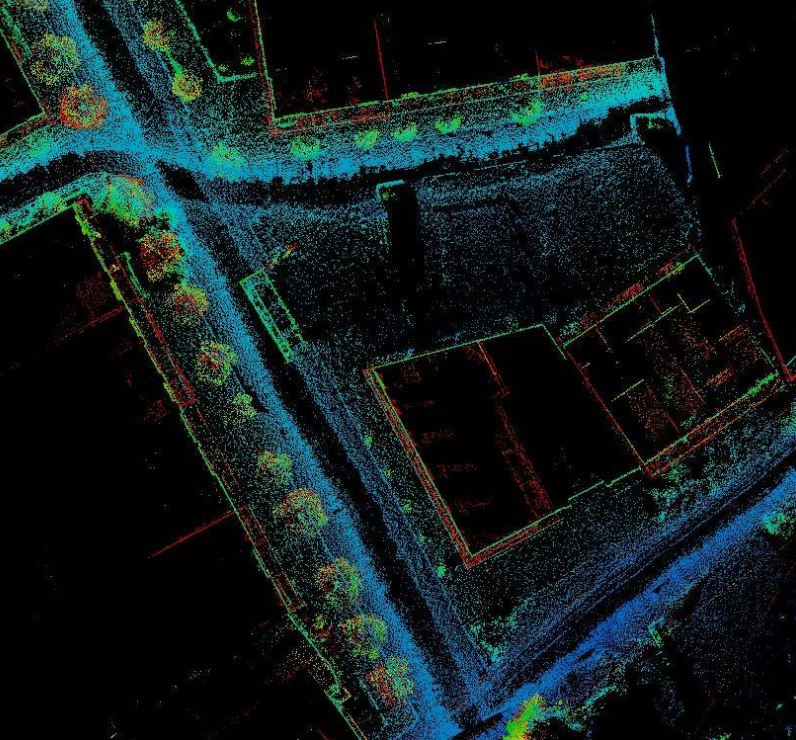
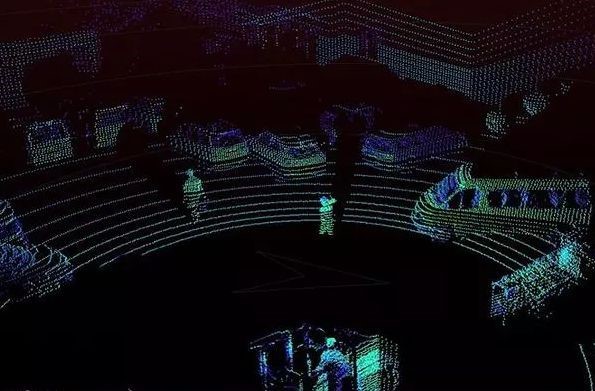
激光雷达LIDAR

激光雷达可被用来绘制地图、定位以及避障。雷达的准确度非常高,因此在无人车设计中雷达通常被作为主传感器使用。激光雷达是以激光为光源,通过探测激光与被探测无相互作用的光波信号来完成遥感测量。激光雷达可以用来产生高精度地图,并针对高精地图完成移动车辆的定位;以及满足避障的要求。以Velodyne 64-束激光雷达为例,它可完成10Hz
旋转并每秒可达130万次读数。
摄像头
广泛用在物体识别以及物体追踪等场景中,像车道线检测、交通灯侦测、人行道检测中都以摄像头为主要解决方案。
雷达和声呐
雷达和声呐系统是避障的最后一道保障。一般是紧急功能中使用。雷达和声呐系统产生的数据不需要过多的处理,通常可被控制处理器采用,并不需要主计算流水线的介入,可实现转向、刹车、或预张紧安全带等紧急功能。
(1)超声波雷达
超声波雷达是利用传感器内的超声波发生器产生40KHz的超声波,再由接收探头接收经障碍物反射回来的超声波,根据超声波反射接收的时间差计算与障碍物之间的距离。超声波雷达成本较低,探测距离近精度高,且不受光线条件的影响,因此常用于泊车系统中。
(2)毫米波雷达:ADAS核心传感器
毫米波是指波长在1mm到10mm之间的电磁波,换算成频率后,毫米波的频率位于30GHz到300GHz之间。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。
毫米波雷达在导弹制导、目标监视和截获、炮火控制和跟踪、高速通信、卫星遥感等领域都有广泛的应用。近些年,随着毫米波雷达技术水平的提升和成本的下降,毫米波雷达开始应用于汽车领域。
毫米波雷达关键技术主要由国外电子公司掌控。毫米波雷达系统主要包括天线、收发模块、信号处理模块,而MMIC(MonolithicMicrowaveIntegratedCircuit)芯片和天线PCB板(PrintedCircuitBoard)是毫米波雷达的硬件核心。
目前毫米波雷达关键技术主要被Bosch、Continental、Denso、Autoliv等零部件巨头垄断,特别是77GHz产品技术只有Bosch、Continental、Denso、Delphi等少数几家公司掌握。

感知
在获得传感信息之后,数据将被推送至感知子系统以充分了解无人车所处的周围环境。
在这里感知子系统主要做的是三件事:定位、物体识别以及物体追踪。
定位
GPS以较低的更新频繁提供相对准确的位置信息;IMU则以较高的更新频率提供准确性偏低的位置信息。我们可使用卡尔曼滤波来整合两类数据各自的优势 ,合并提供准确且实时的位置信息玩意儿新。IMU每5ms更新一次,但是期间误差不断累积精度不断降低。所幸的是,每100ms可以得到一次GPS数据更新,以帮助我们校正IMU积累的误差。因此,我们最终可以获得实时并准确的位置信息。然而,我们不能仅仅依靠这样的数据组合以完成定位工作。原因有三:其一、这样的定位精度仅在一米之内;其二:GPS信号有着天然的多路径问题将引入噪声干扰;其三,GPS必须在非封闭的环境下工作,因此在诸如隧道等场景中GPS都不适用。
基于视觉的定位原理:
此作为补充方案,摄像头也被用于定位。简化来说,基于视觉的定位由三个基本步骤组成:
- 通过对立体图像的三角剖分,将首先获得视差图用以计算每个点的深度信息;
- 通过匹配连续立体图像帧之间的显著特征,可通过不同帧之间的特征建立相关性,并由此估计这两帖之间的运行情况 ;
- 通过比较捕捉到的显著特征和已知地图上的点来计算车辆的当前位置。
然而,基于视觉的定位方法对照明条件非常敏感,因此其使用受限并可靠性有限。
基于立体视觉测距的流程图:
为了在地图中定位运动的车辆,我们使用粒子滤波的方法来关联已知地图和激光雷达测量过程。粒子滤波可以在10厘米的精度内达到实时定位的效果,在城市的复杂环境中尤为有效。然而,激光雷达也有其固有的缺点:空气悬浮颗粒影响。为此,需要多传感器融合。
7. 物体识别与跟踪
激光雷达可提供精准的深度信息,因此常被用于在无人驾驶中执行物体识别和追踪的任务。近年来,深度学习技术得到了快速的发展,通过深度深度学习可达到较显著的物体识别和追踪精度。
五、深度学习的问题## 标题
批评AI像中世纪炼金术
google AI 实验室的研究人员 表示:他的领域已经偏离了科学和工程学的界限而变成了“ 炼金术”, 研究人员其实并不知道为什么某些算法行之有效,而其他算法徒劳无益,人工智能程序倾向于以人类创造者不理解的方式解决问题。但目前的问题不同:研究人员不仅不了解他们的AI程序的问题解决技术,他们也不了解他们用来构建这些程序的技术,像炼金术一样,把一种金属变成另一种金属,但却不明白为什么会产生此变化
Rahimi说:“人工智能领域存在一种‘痛苦’。我们中有很多人都感觉自己使用的是外星技术。”
持反对观点者:
Facebook的首席人工智能科学家Yann LeCun担心将过多的精力从前沿技术转移到核心理解上,可能会减缓创新速度并阻碍人工智能的实际应用。他表示,“这不是炼金术,而是工程学,工程学本就很混乱。”
Yann LeCun回应说,在科学技术史上,工程学上的进步几乎总是先于理论认识:望远镜诞生先于光学理论,蒸汽机先于热力学,飞机先于空气动力学,无线电和数据通信先于信息论,计算机先于计算机科学。
最后
以上就是聪慧康乃馨最近收集整理的关于人工智能&自动驾驶的全部内容,更多相关人工智能&自动驾驶内容请搜索靠谱客的其他文章。








发表评论 取消回复