参数
| T, с | Вид возмущения |
| 0.2 | 2e^(−kT)sin(3kT) + 0.1 |
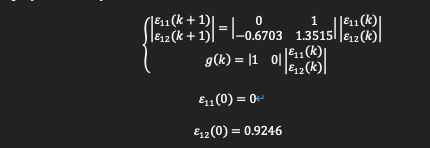
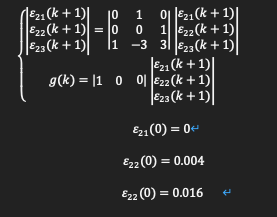
建立离散状态方程
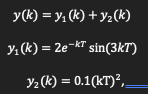
干扰信号有如下形式:
![]()
取样时间为T=0.2.
分解成两个信号加的形式
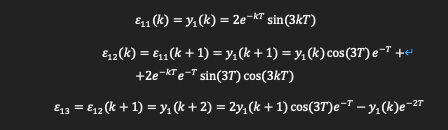
对于第一个信号
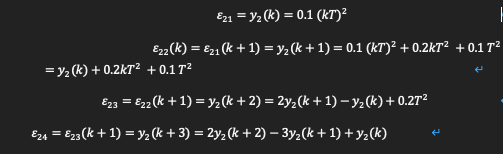
对于第二个信号:
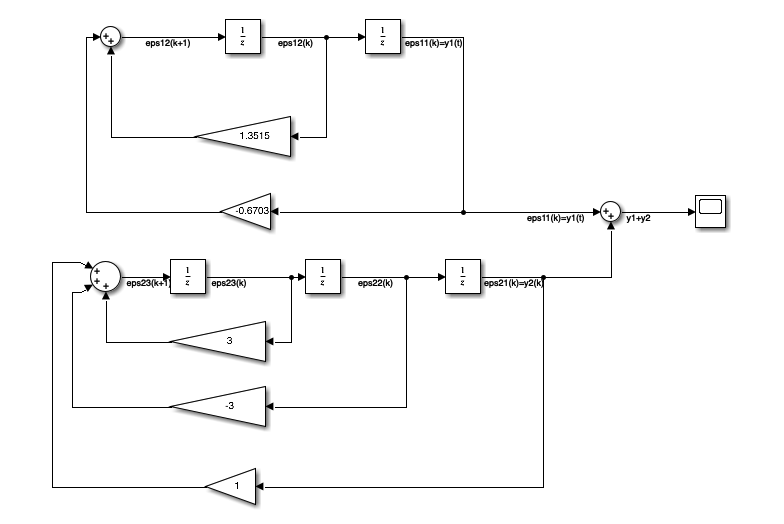
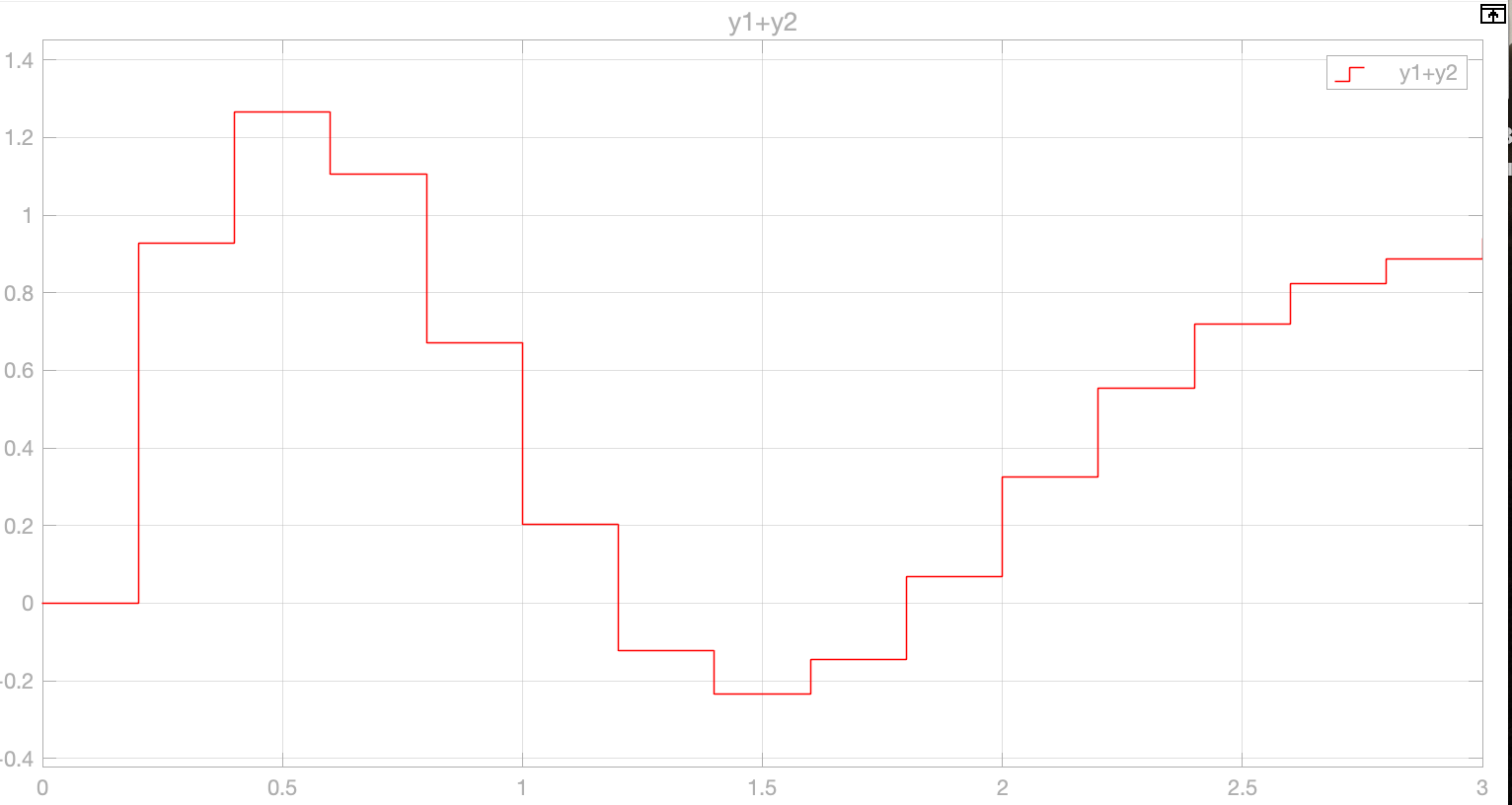
根据状态方程建立simulink模型
相关文章:
使用simulink仿真连续(离散)线性定长系统全维渐进状态观测器_Giiwedin的博客-CSDN博客
使用drem对控制系统进行参数估计simulink仿真_Giiwedin的博客-CSDN博客
对给定干扰信号的simulink数字控制系统仿真_Giiwedin的博客-CSDN博客_simulink扰动信号
二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机数学模型
二相混合式步进电机开环细分控制simulink建模仿真含模型文件_Giiwedin的博客-CSDN博客
最后
以上就是欢喜朋友最近收集整理的关于对给定干扰信号的simulink数字控制系统仿真参数建立离散状态方程的全部内容,更多相关对给定干扰信号内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复