概要
CODE;000
内涵协同感知的内容,后文对架构和应用层描述较多,通信方面描述较少
自动驾驶有两个关键特征:感知和操控(maneuvering)。若想更好的增强这两个功能,将V2X通信技术融入到汽车中比单独从汽车上下功夫会产生更好的效果。本文发布时所普遍使用的第一代V2X是以“为驾驶员提供预警信息”为出发点,并未具备自动驾驶场景所需要的一些功能,要实现后者,势必要对其进行改进。这篇文章完成了以下工作:
- 介绍自动驾驶研究的技术背景(2015时间点)
- 介绍了自动驾驶的使用场景(案例)
- 以自动驾驶为使用场景的通信技术的功能性需求、性能需求
- 目前的V2X通信标准
- 应用于协同自动驾驶的消息扩展
1.技术背景
感知和操控在传统汽车中是交由传感器独立完成的,但因传感器精度有限及应用场景的复杂性,很难完成大范围环境感知与控制车辆间协作(比如A车要向B车所在车道变道,B车只有高频次的对前方物体进行探测才能避免碰撞,这对传感器的精度、使用频率要求都很高;但若A可以向B发个变道预警,那么B在未收到预警时就可降低探测的频率)。将通信与自动汽车结合对感知和操控的增强体现在以下两个方面:
- 协同感知 :通过相互交换传感器信息增加感知范围;
- 协同操控 :使一组自动汽车根据一个集中式或分散式的决策指定策略协同驾驶。
2.使用案例
列队行驶:一个车队由一个leading和多个Following组成,队内成员以较高频率交换互相的数据,维持车之间较小的间隔,从而保证道路通行能力并提高安全性和舒适性;多车道时,也有可能不存在leading,车辆控制部署在每一个成员车辆中,这种情况下一辆车的故障会或多或少的影响整个车队,从而导致车队的编队更稳定。
协同变车道:借助路边单元,车辆相互共享彼此的计划行驶轨迹,从而协商和调整彼此的行动。
协同交叉路口管理:这里需要一个协调机制来确保车的轨迹不会相互重叠(防止碰撞呗),一种可能的方案是通过路边单元来分配车的相对优先级。
协同感知:车之间共享感知信息以完成对更大范围的感知。(有时候也可利用路边传感器的信息)
3.通信需求
从期望实现的功能出发对通信提出要求:功能性需求
-
可传输更大量的车辆状态数据:比起过去的位置速度等信息,通过通信传输的信息量更大,比如可能要求传输在未来几面内的预测形式路径等信息。
-
队列管理:这里的队列指车队的成员列表,这个列表的创建和变更都需要管理机制进行管理。
-
谈判策略:当车道变更等需要其他车辆配合的行为发生时,需要相关车辆通过协商决定下一步的动作。
-
交叉口管理:1G-V2X通过周期性广播交叉口的信息实现绿灯最优速度查询、交通灯时长变化等功能(这都是以听从交通灯的管控为前提的);自动驾驶允许传输更加详细的信息,控制中心将为车辆分配优先级,可能不再需要交通灯的调控。
-
协作感知:目前车辆通信交换的信息很粗糙(如一个粗糙的时间分类和大致的定位信息),协作感知要求可以交换彼此更详细的信息。
从性能出发对通信提出的要求(也就是具体要提高哪些指标):性能需求
- 高消息速率:因为车间距减小了,所以要提高信息交换的频率。从1-100Hz的消息交换频率的基础上提高。
- 能进行数据负载控制:车辆密度加大导致负载增加。通过利用可用频谱或分散式拥塞控制改善。
- 低延迟:包括传感器数据传输的延迟、协议栈中处理延迟和链路上的传输延迟。目前的延迟要求为300ms,在此基础上降低。
- 高可靠的数据包转发:为防止控制算法故障,对信息交换的可靠性要求更大了。
4.目前的V2X通信标准
主要是由欧洲的CEN、ETSI、IEEE、ISO负责,在C-ITS(协同智能运输系统)的背景下进行。以下说明欧洲的Release 1的核心标准。
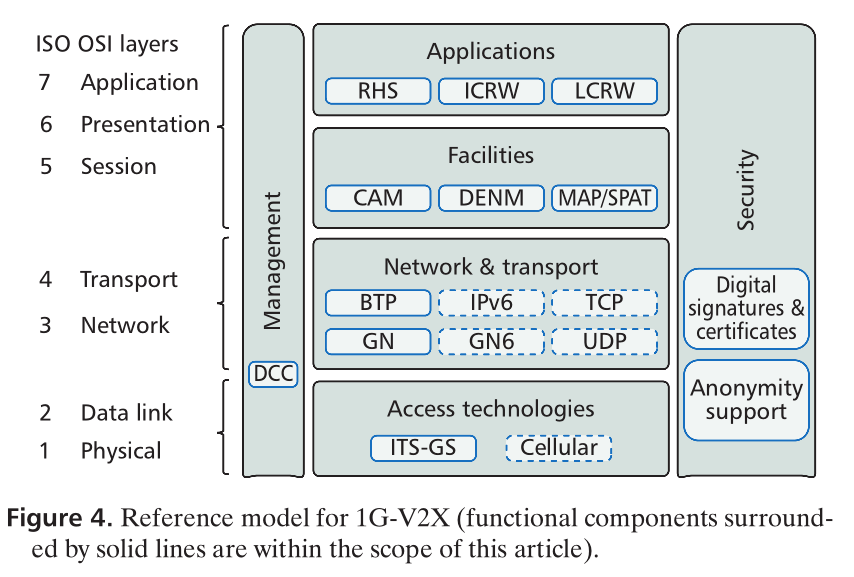
ISO/OSI参考模型从下到上分为:1 物理层、2 数据链路层、3 网络层、4 传输层、5 会话层、6 表示层、7 应用层。共七层。(图左侧标注)
与1G-V2X的对应为:
- 1 2 -> 接入技术:ITS-G5技术、Cellular蜂窝技术
- 3 4 - > 网络和传输:GeoNetworking协议提供单跳和多跳数据包交付;基本传输协议BTP(一种类似UDP的无连接跨端口协议)
- 5 6 7 -> 设施层:
- 协作感知信息(CAM)传输关键的车辆状态信息(用来安全和交通效率应用);通无限单跳发送周期性消息
- 分散环境通知消息(DENM)用于在地理区域内传播事件驱动的安全信息。通过无线多跳通信发送
- 车辆到基础设施通信的消息:传输交叉口阔普的静态消息和交通灯的动态消息
- 5 6 7 -> 应用层:
- 道路危险信号 RHS:近畿车辆接近、危险位置警告、紧急电子刹车灯等
- 交叉口碰撞风险预警 ICRW:十字路口可能发生的碰撞问题
- 纵向碰撞风险预警LCRW:十字路口可能发生的碰撞问题
5.协作自动驾驶对协议的扩展
1G-V2X是由RHS、ICRW、LCRW等应用驱动。新一代通信技术仍然以来ITS-G5但修改了上层协议层。为适应其变化,我们扩展何修改设施层以满足通信需要。
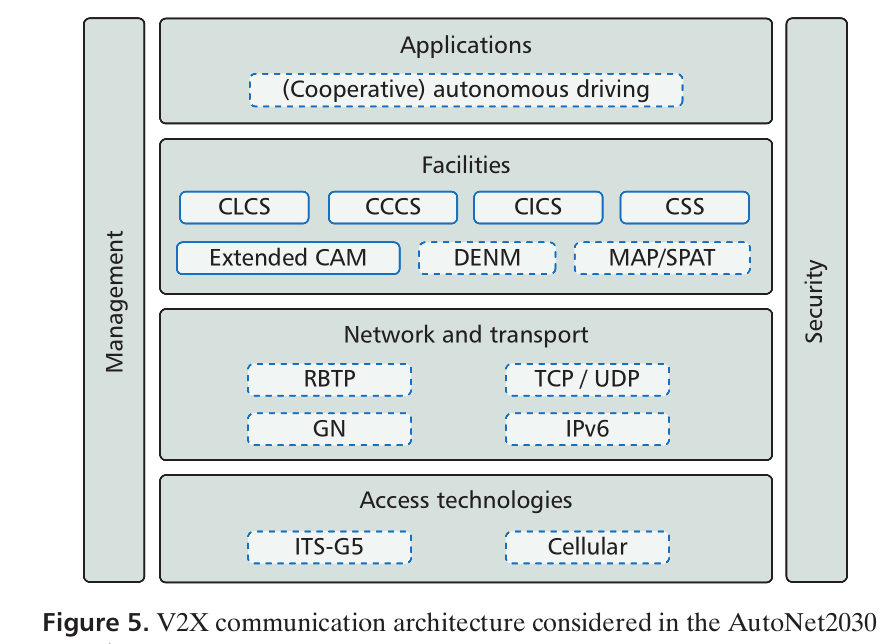
与1G-V2X相比,变化如下
-
网络和传输层:更换BTP为RBTP(可靠BTP),删掉GN6
-
设施层:CAM无法传输大量的状态信息,因此在此基础上增加高频和低频的存储器(Extended CAM)来承载控制数据。另外增加了CCCS、CLCS、CICS、CSS
-
CCCS --- 车队控制通信服务:支持车队成员间信息交换,满足车队管理的需求
-
可动态调整成员间信息的传输频率,并维护一个local graph,其中记录了车队成员和成员间相互运动的依赖性
-
消息类型:加入/离开车队、变道、修改local graph
-
-
CLCS --- 协同式变道服务:支持不属于同一车队的车进行谈判
-
分为:搜索、准备、执行 三个阶段;
-
意外发生时通过变道中止(LCA)消息中止动作,通过重传和确认管理机制保证LCA消息的可靠传递
-
-
CICS --- 协同式交叉路口控制:由路边单元充当交叉口控制器,为车辆分配通行优先级
-
消息类型分为:交叉口进入请求、交叉口进入取消、交叉口进入状态;
-
支持非协同车辆通过交叉口:1 通过交通灯控制;2 若此车在队列中,则跟随队长优先级通过路口
-
-
CCS --- 协同感知:通过协作感知消息(CSMs)实现监测信息共享
-
一个CSM可描述多达16个对象属性,包括位置、航向、v和置信度等
-
与传统传感器感知对象的相对速度不同(相对速度:你在一辆50km/h的车上观测一辆60km/h的汽车,观测结果是10km/h),CSM只提供对象的绝对属性。
-
以1hz构造CSMs,通过无限单跳传输,在服务通道而非控制通道上上传输,用以解决高负载问题。
-
-
-
应用层:不再强调RHS等事件,以自动驾驶应用统一标识
-
此外还增加了普通模式和高感知模式两种工作模式,高感知模式下,通信频率由原来的1-10Hz变更为固定的10Hz。
最后
以上就是追寻春天最近收集整理的关于[论文笔记] Enhancements of V2X Communication in Support of Cooperative Autonomous Driving概要的全部内容,更多相关[论文笔记]内容请搜索靠谱客的其他文章。




![[论文笔记] Enhancements of V2X Communication in Support of Cooperative Autonomous Driving概要](https://www.shuijiaxian.com/files_image/reation/bcimg22.png)
![[4G&5G专题-53]:物理层-手机终端的传输模式TM详解](https://www.shuijiaxian.com/files_image/reation/bcimg23.png)


发表评论 取消回复