本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》。
此专栏是关于《自动驾驶汽车定位技术》书籍的笔记.
4.车联网辅助定位技术
4.1 车联网辅助地图数据的采集与发布
- 高精度地图的数据主要包括:反映道路基础设施的静态数据,反映交通运行情况(交通标志、交通控制、交通状况、道路性能、道路气象等)的准动态数据和反映道路目标物(道路拥堵情况、施工情况、是否有交通事故、交通管制情况、天气情况等动态交通信息等)的高度动态数据;
- 准动态交通运行数据和高度动态的道路目标物数据是实现自动驾驶高精度定位、辅助环境感知、规划与决策等功能的必要条件,且均可通过车辆网进行动态数据的采集、发布与共享;
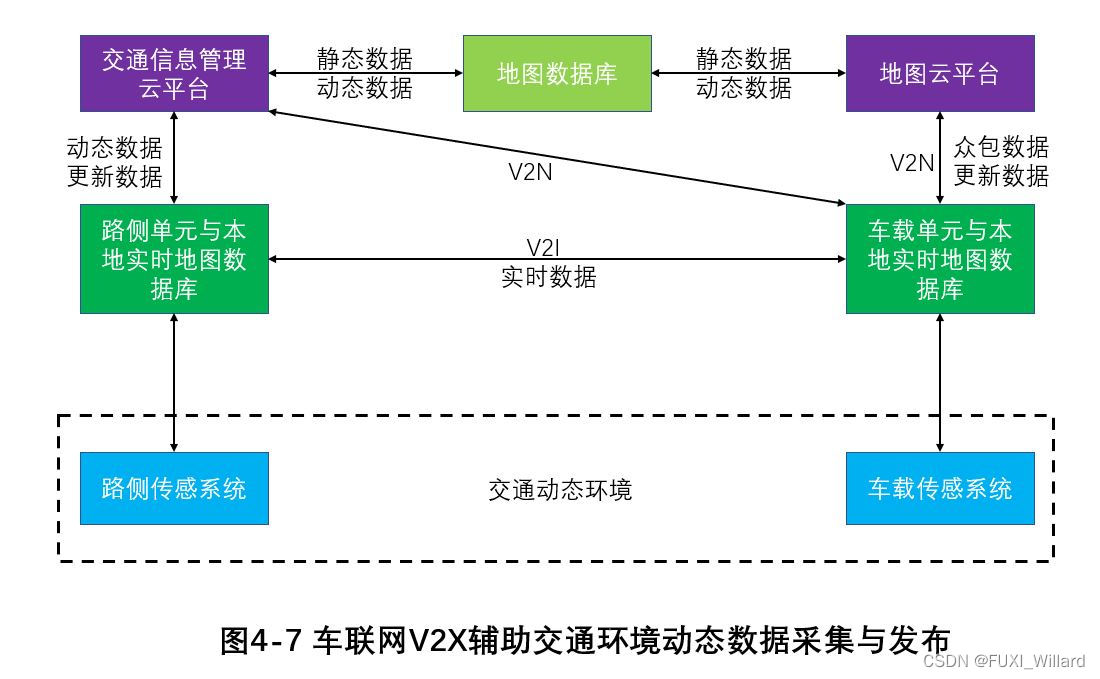
4.1.1 车联网辅助动态地图数据的采集与发布
- 准动态地图数据主要包括:道路性能、道路气象、临时性交通标志及交通控制等交通相关数据,其更新频次是秒或分钟级;
- 准动态地图数据的采集与发布主体有交通信息管理云平台和地图云平台等;
- 交通信息管理平台采集的数据包括:路侧单元采集的交通状况、道路性能和道路气象等交通运行数据,及临时性交通标志和交通控制等交通管理数据;
- 地图云平台采集的数据包括:通过车载单元采集识别的交通状况、道路性能和道路气象等交通运行数据;
- 准动态地图数据的发布主要通过基于蜂窝移动通信的车联网技术实现,为汽车提供更精准的准动态地图数据支撑,用以更新车载高精度地图动态数据,进一步辅助自动驾驶定位;
4.1.2 车联网辅助高度动态数据的采集与发布
- 高度动态数据主要是实时道路目标物数据,包括:汽车位置、汽车行驶状态及行人等信息,存储在车载单元创建的实时汽车环境感知地图中;
- 高度动态数据可由车载传感器采集道路目标物获得,也可通过V2X采集实时交通动态环境数据;
- 每辆车均可通过V2X将汽车自身位置、状态、操作数据及途径行人位置以广播方式通知周围汽车,车载单元的动态地图不断更新周边汽车的位置和行人位置等信息,并通过与SLAM进行融合,即可创建一张实时更新的汽车环境感知地图,辅助自动驾驶汽车定位;
4.2 室内定位技术
室内定位技术结合GNSS等室外定位技术可为自动驾驶汽车提供从道路到室内行驶场地的全程导航服务,解决大型复杂室内场地的汽车定位难题;
4.2.1 室内定位技术原理
室内定位技术:指在GNSS信号受遮挡的室内环境中实现汽车位置定位,包括:采用无线通信、基站定位和惯性定位等多种技术集成,设计一套室内汽车定位体系架构,从而实现汽车等各类待定位目标或流动站在室内空间中的位置感知;常用的室内定位方法:参考标签法、指纹定位法、距离交会定位法、航迹推算等;
-
参考标签法
参考标签法:在指定场景中按照一定方式布置用于定位的参考标签,提前记录标签的位置和标签到阅读器的接收信号强度指示(Received Signal Strength Indication,RSSI)值;
当阅读器读取到目标标签时,获取其RSSI值并与参考标签的RSSI值进行对比,选取与目标标签RSSI值最接近的若干个参考标签,从而估计出目标标签的位置,实现室内目标的定位;
-
指纹定位法
指纹定位法:指通过接收到的待定位目标信息值与已建立的信息库进行匹配,以确定待定位目标的位置;
该定位方法通常包括:离线采集和定位两个阶段;首先,离线采集阶段是通过实际采集或计算分析建立指纹地图或指纹数据库;然后,定位阶段通过将实时接收到的数据特征与指纹信息库中的特征参数进行对比,进而找到最好的匹配参数,使待定位目标对应的位置坐标即被认为是待定位目标点的位置;
-
距离交会定位法
距离交互定位法:通过测量流动站到至少三个已知参考点的距离,进而确定流动站的位置;
{ ( X 1 − X a ) 2 + ( Y 1 − Y a ) 2 + ( Z 1 − Z a ) 2 = d 1 a 2 ( X 2 − X a ) 2 + ( Y 2 − Y a ) 2 + ( Z 2 − Z a ) 2 = d 2 a 2 ( X 3 − X a ) 2 + ( Y 3 − Y a ) 2 + ( Z 3 − Z a ) 2 = d 3 a 2 (1) begin{cases} &(X_1-X_a)^2+(Y_1-Y_a)^2+(Z_1-Z_a)^2=d_{1a}^2 \ &(X_2-X_a)^2+(Y_2-Y_a)^2+(Z_2-Z_a)^2=d_{2a}^2 \ &(X_3-X_a)^2+(Y_3-Y_a)^2+(Z_3-Z_a)^2=d_{3a}^2 end{cases}tag{1} ⎩⎪⎨⎪⎧(X1−Xa)2+(Y1−Ya)2+(Z1−Za)2=d1a2(X2−Xa)2+(Y2−Ya)2+(Z2−Za)2=d2a2(X3−Xa)2+(Y3−Ya)2+(Z3−Za)2=d3a2(1)
流动站坐标为: ( X a , Y a , Z a ) (X_a,Y_a,Z_a) (Xa,Ya,Za),获取与三个已知参考点之间的距离及位置信息,其信息集合为: ( X 1 , Y 1 , Z 1 , d 1 a ) 、 ( X 2 , Y 2 , Z 2 , d 2 a ) 、 ( X 3 , Y 3 , Z 3 , d 3 a ) (X_1,Y_1,Z_1,d_{1a})、(X_2,Y_2,Z_2,d_{2a})、(X_3,Y_3,Z_3,d_{3a}) (X1,Y1,Z1,d1a)、(X2,Y2,Z2,d2a)、(X3,Y3,Z3,d3a),即可组成方程组求取流动站坐标;距离交会定位方法基于不同的测距方式分为:基于RSSI、基于信号到达时间(Time Of Arrival,TOA)、基于信号到达时间差(Time Difference Of Arrival,TDOA)、基于信号到达角度(Angle Of Arrival,AOA);
-
RSSI测量
RSSI测量是通过推算信号在自由空间的传播损耗,可使用理论或经验模型将传播损耗转化为测量距离;
在自由空间中,距离发射机 d d d处的天线接收到的信号强度表示为:
P R P T = G R G T λ 2 ( 4 π ) 2 d 2 L (2) frac{P_R}{P_T}=frac{G_RG_Tlambda^2}{(4pi)^2d^2L}tag{2} PTPR=(4π)2d2LGRGTλ2(2)- P R P_R PR:距离 d d d处的天线接收功率;
- P T P_T PT:发射天线的信号功率;
- G R G_R GR:接收天线的增益;
- G T G_T GT:发射天线的增益;
- λ lambda λ:信号波长;
- L ( L > 1 ) L(L>1) L(L>1):系统的损失;
-
TOA测量
TOA测量是测量信号在流动站和基站之间的单程传播时延或往返时间;
TOA测量属于多边定位方法,假设电磁波从流动站到基站的传播时延为 t t t,传播速度为 c c c,则该流动站位于以该基站为圆心、半径为 c t ct ct的圆上;以此类推,流动站也在第二个、第三个基站的圆上,故流动站的位置坐标为三个圆的交点;
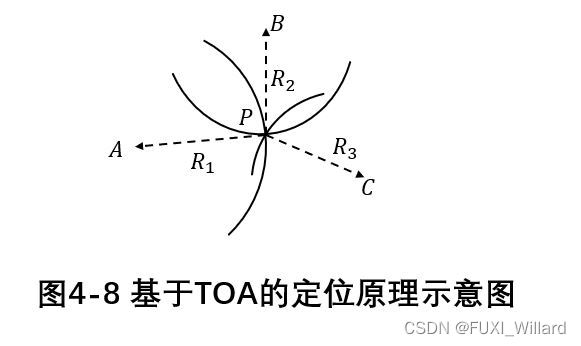
其中: A 、 B 、 C A、B、C A、B、C是三个已知位置信息的基站, P P P为流动站, R 1 、 R 2 、 R 3 R_1、R_2、R_3 R1、R2、R3分别为流动站到基站 A 、 B 、 C A、B、C A、B、C的距离; -
TDOA测量
TDOA测量是测量信号到达时间,但TDOA使用到达时间差进行定位计算,利用双曲线交点确定流动站位置,不需要基站和流动站的精确同步;通过TDOA测量,可以得到流动站和两个基站的距离之差,即流动站位于以两个基站为焦点的双曲线的交点,再引入第三个基站,可得到两个以上双曲线方程,则双曲线的交点即为流动站的位置;
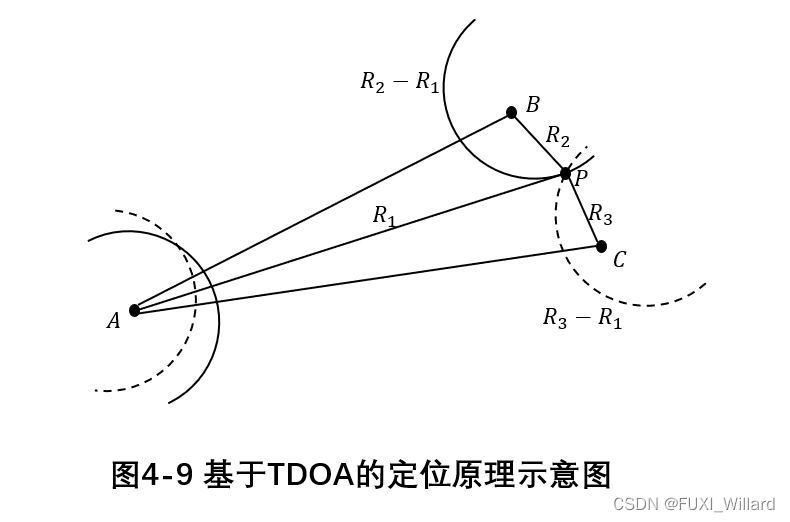
其中: A 、 B 、 C A、B、C A、B、C为三个已知位置的基站, P P P为流动站, R 1 、 R 2 、 R 3 R_1、R_2、R_3 R1、R2、R3分别是流动站到基站 A 、 B 、 C A、B、C A、B、C的距离,其中 R 2 − R 1 、 R 3 − R 1 R_2-R_1、R_3-R_1 R2−R1、R3−R1为定值; -
AOA测量
AOA测量是通过流动站的接收机的天线阵列测出被接收的电磁波的入射角度,具体包括:测量基站信号到流动站的角度或流动站到达基站的角度;
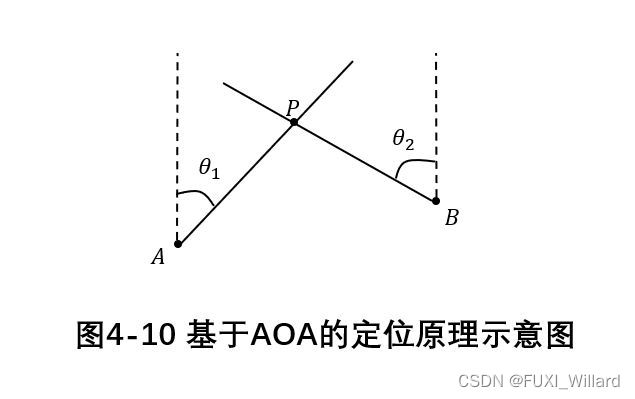
两个基站 A 、 B A、B A、B,可以得到两条方向线,其交点即为流动站位置;其中: θ 1 theta_1 θ1为流动站 P P P的信号到达基站 A A A的角度; θ 2 theta_2 θ2为流动站 P P P的信号到达基站 B B B的角度;
-
4.2.2 室内定位关键技术
- Wi-Fi定位
- 基于Wi-Fi室内定位系统主要利用RSSI的指纹数据库定位及通过RSSI距离交会方法进行定位;
- RFID定位
- RFID是一种利用电感和电磁耦合的传输特性,实现对目标物体的自动检测与识别;
- RFID定位系统通常由电子标签、射频阅读器及后台计算机数据库组成,常用的定位方法是邻近检测法,即利用RSSI实现多边定位算法可在一定程度上实现范围估计,进而实现物体定位;
- 根据电子标签是否有源分为:无源RFID系统和有源RFID系统;无源RFID系统利用电感耦合实现对被识别物体的检测,相比有源RFID,体积更小,耐用性更高,成本更低,多使用邻近检测实现定位;有源RFID系统的电子标签含电池,因此电子标签的射频信号传输范围相比无源RFID更大,达到30m以上,可用于实现基于RSSI测量的指纹定位;
- 超宽带定位
- 超宽带(Ultra Wide Band,UWB)定位系统通常包括UWB接收器、参考标签及其他标签;
- UWB技术通过发送纳秒级超窄脉冲来传输数据,可获得吉赫兹级的带宽,发射功率低且无载波;
- 在室内定位应用场景下,UWB信号在传播中容易受到多径和非视距的影响,导致定位精度受到很大的影响;
- 可见光定位
- 可见光定位:将LED光源安装在室内的天花板或室内其他顶部位置,通过将编码调制信号加载到光电模块上,LED光源就可以向外发送明暗闪烁的光信号;在流动站配备光检测器,用于接收光信号,通过对光信号进行光电转换、信号调理等方式,提取出光信号中包含的数据信息,并在现有数据信息的基础上,采用相应的定位算法推算出流动站的坐标信息;
- 地磁地位
- 地磁匹配导航:将预先选定区域的地磁异常值制成参考地磁图并存储在流动站中;
- 当载体通过预先选定区域时,地磁传感器实时测量地磁场强度,进而转化成地磁异常值,并构成实时地磁图;
- 在惯性导航系统标注位置的基础上把实时地磁图与预存的参考地磁图进行匹配,确定实时地磁图在参考地磁图中的最佳相关点,从而确定出载体的精确位置;
- 地磁定位技术是一种采用地磁地图进行定位的方案,且通常采用指纹定位的方法;
最后
以上就是落寞雪糕最近收集整理的关于学习笔记14--车联网辅助定位技术的全部内容,更多相关学习笔记14--车联网辅助定位技术内容请搜索靠谱客的其他文章。








发表评论 取消回复