这是2022a自带的例子
本例展示了如何为车辆排程应用程序设计控制器。在一排车辆中,每辆后面的车辆与前面的车辆保持恒定的间距。车辆以密集的车队行驶可以改善交通流量、安全性和燃油经济性。
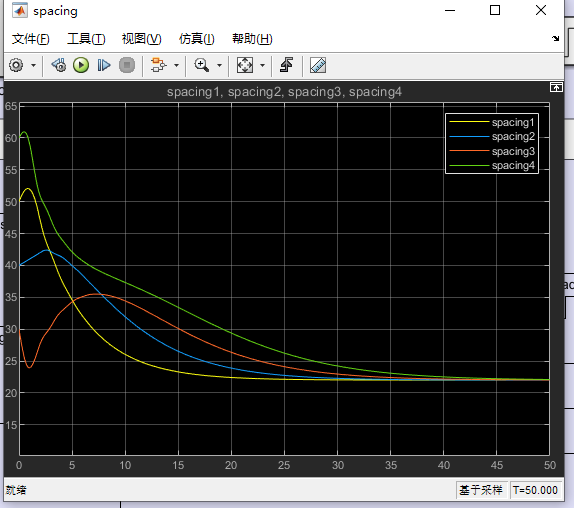
 单独车辆稳定性——如果前面车辆以恒定速度行驶,则后面车辆的间距误差收敛为零。
单独车辆稳定性——如果前面车辆以恒定速度行驶,则后面车辆的间距误差收敛为零。
串稳定性-间距误差在向车辆串尾部传播时不会放大。

L是期望车间距,

K2是个PD
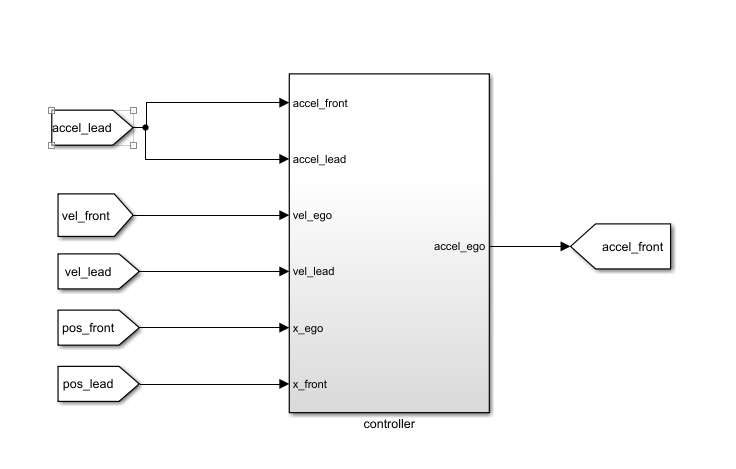
看看模型
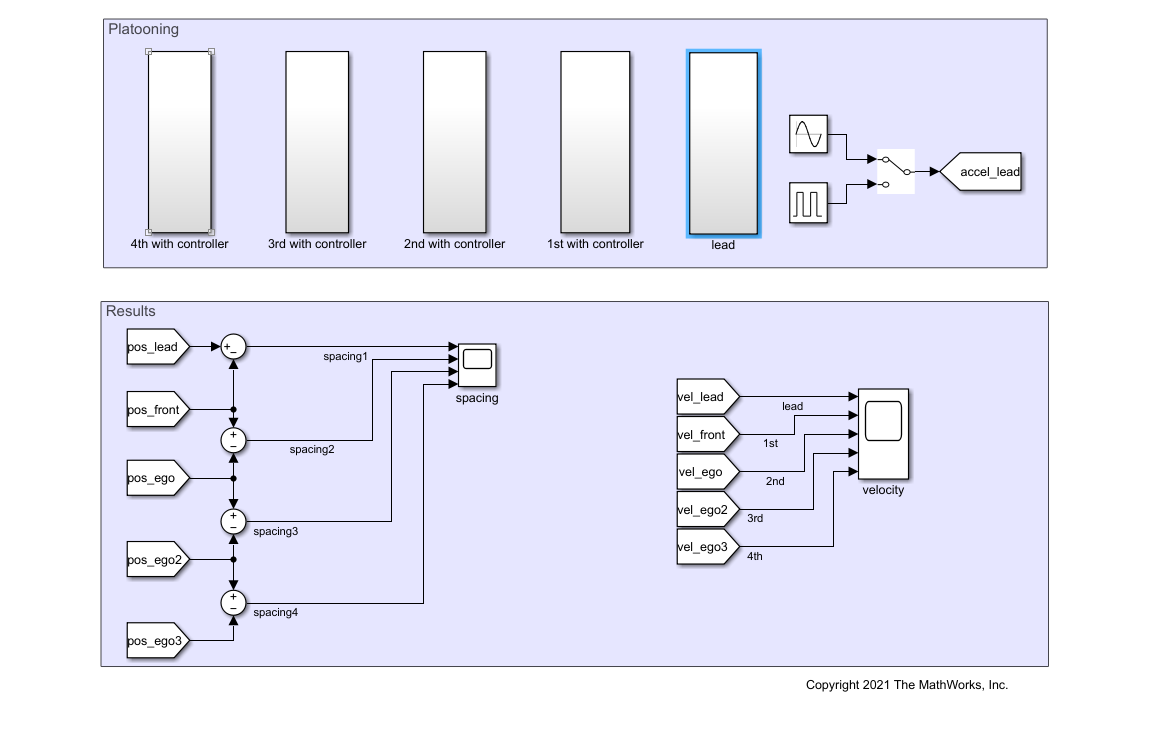
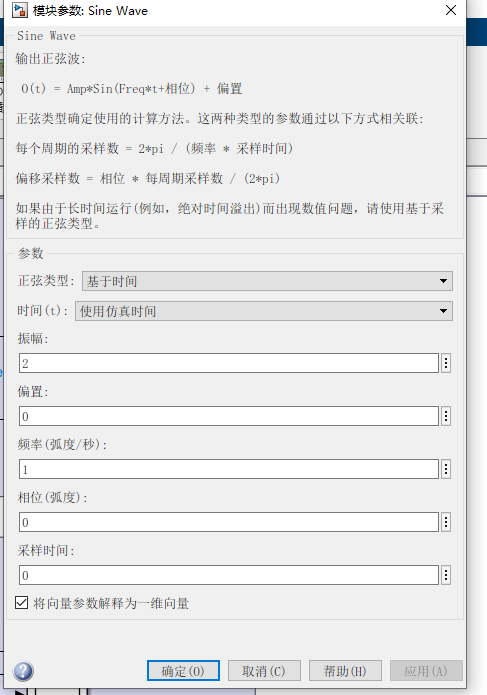
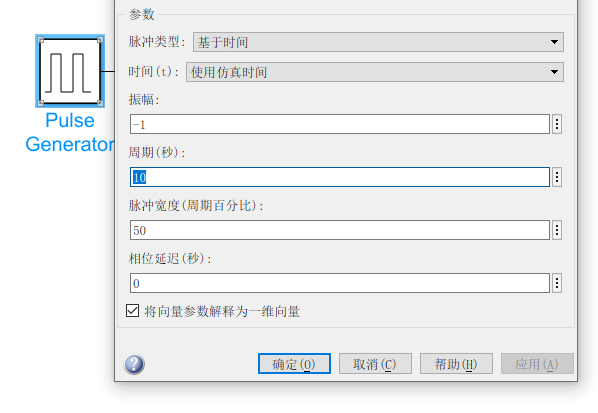
头车的加速度
首车模型的搭建
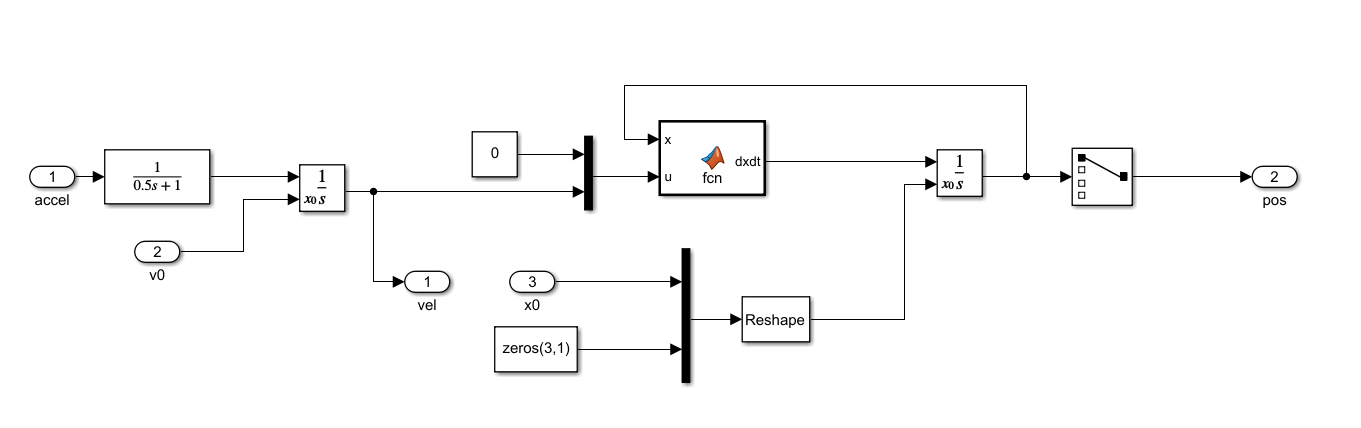 看一下卡车的模型
看一下卡车的模型
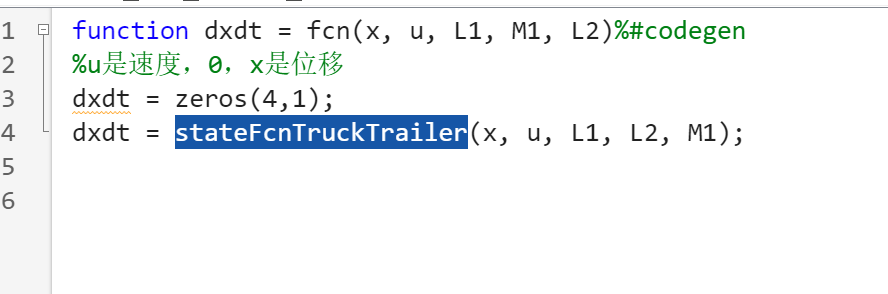
带有一个半挂车动力系统的玩具卡车:
四个状态:拖车中心的xy;拖车方向;卡车方向
两个输入:方向盘转角;纵向速度
对这个公式不深究,

看一下第一辆车的控制器
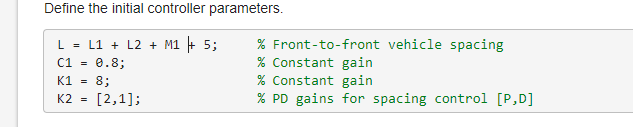
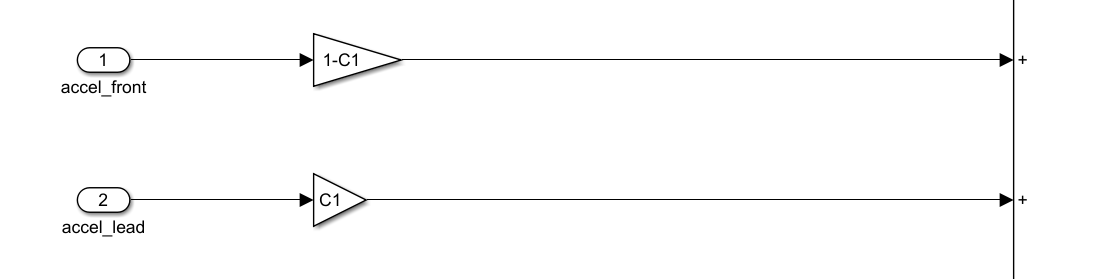
前车加速度占比0.8
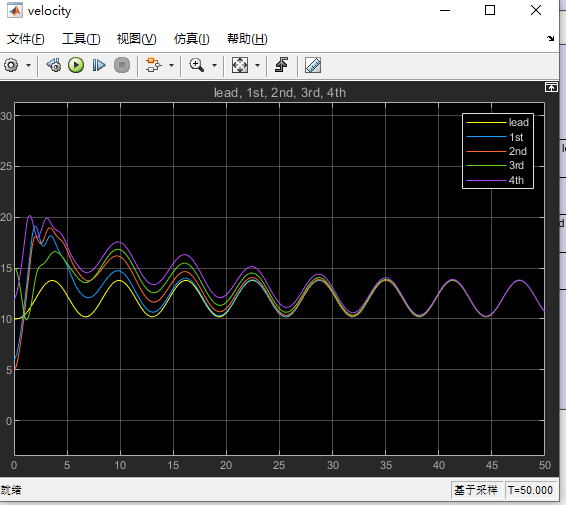
五辆车的初始速度和距离
10 6 5 15 12
200 150 110 80 20
误差收敛的更快了,使用PID Tuning 调节
PID Tuning
最后
以上就是含糊樱桃最近收集整理的关于Design Controller for Vehicle PlatooningPID Tuning的全部内容,更多相关Design内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复