
经典控制是基于传递函数(transfer function)这一数学模型进行LTI系统分析和设计的。本篇从卷积(convolution)开始论述,对传递函数的一些重要概念和性质进行回顾。理解传递函数在后续经典控制学习中尤为重要。
关于传递函数以及零极点各自的作用,就目前来讲只需要点到为止。在没有学习频域分析前,多数初学者是记不住这些麻烦的规律的。
本篇主要内容:
- 卷积与LTI系统响应
- 从Laplace变换到传递函数
- 零初始条件
- 传递函数
卷积与LTI系统响应
线性系统是一种可以由线性微分方程描述的系统,实际中的系统或多或少都含有一定的非线性,由此线性系统的假设只能是在一定条件下成立。 LTI系统是一类特殊的线性系统,其继承了线性系统叠加性的特点,也拥有时不变特性,即系统的参数不随时间变化,亦即信号作用时间的前后只影响响应输出的先后而不影响形状。
在求解LTI系统的响应时,利用LTI系统这两条性质,有人想到:求解任意输入
仔细想了想这部分公式太多,可能大家不愿意看,所以索性删掉了一些公式,这样说:
(这里感谢@这不是我的真名指出未解释积分中的
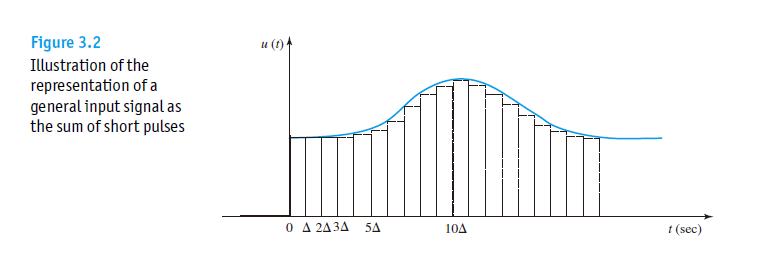
现假设系统在0时刻的单位短矩形脉冲响应
下一步我们关注第二个短矩阵脉冲,就在第一个的隔壁,形状也一样,但是幅值改变了,我们假设时间间隔为一个
再下一步不用多说了吧,继续延迟,幅值是下一个时刻u的值。那么随着时间积累,我们写成积分形式,注意
这样一个零初始条件的LTI系统的响应就可以由上面这个积分计算得到,这个积分正符合卷积积分(convolution)的定义,
为了求解任意输入对一个LTI系统的响应,我们将输入进行分解,想象其由无数个脉冲函数组成,且我们知道该LTI系统对t=0时的单位脉冲函数的响应,那么其他所有脉冲的响应无非就是在此响应的基础上进行rescale和延迟。如此,从0时刻开始积分到无穷,便有了上面的卷积积分。
需要指出的是,我们默认系统是因果系统,实际的物理系统也都满足这个条件,因此积分的下限也不是从负无穷,而是从0开始。因为0时刻之前输入信号均为0,零初始条件的因果系统在0时刻之前不会有任何响应。我们通常也可以人为指定时间的起点,并假设零点之前是不存在任何信号的,也不会有任何响应,卷积总是为0。
从Laplace变换到传递函数
Laplace变换是重要的数学变换,在经典控制理论中有重要作用。然而其与Fourier变换涉及篇幅较长,且这些对于理解控制的其他概念影响有限,在此讲述核心的理解。
我们先从Fourier变换开始讲起。
Fourier变换实际上就是把时域信号
正交的概念由向量內积(inner product)而来,若两个向量的內积为0,则向量正交。而一个函数实际上可看成是无穷维的向量,两个连续复变函数f和g的內积在
由此傅里叶变换由此积分式定义为:
也就是说我们把
Laplace变换将信号从时域变换到了频域,这点和Fourier变换是一样的,只不过添加了一个
下面我们从LTI系统响应的Laplace变换中借助卷积公式来导出传递函数的概念。
根据Laplace变换(单边)定义式:
那么代入卷积公式,也可以认为我们在卷积公式两端施加Laplace变换
也就是说对卷积公式两端做Laplace变换后,在频域中的卷积公式就变成了一个简单的频域函数相乘,而不再是求积分了。
显然为了求解频域内LTI系统的响应,我们需要知道
零初始条件
从线性常微分方程中我们可以轻松得到传递函数,但前提条件也是零初始条件。一般地,非零的初始条件下,我们仍然可以用Laplace变换来求解ODE,但是却不能找到输出与输入的比值以构成传递函数。
如上篇文章所述,LTI系统的全响应分为零状态和零输入响应。传递函数既然要满足零初始条件,那利用传递函数显然只能得到零状态响应,也就是只关心输入对系统输出造成的影响。由此可见传递函数描述了输入与输出之间的关系,而内部状态我们都假设为0了。对于一个LTI系统而言,初始状态并不会影响其本身具有的某些性质,比如稳定性,我们之后会讲到,不管初值在哪里,稳定的LTI系统的解始终会收敛至唯一的平衡点。我们认为传递函数足以能够让我们能够研究一个LTI系统中我们所关心的性质。
从微分方程解的角度来讲,零状态响应的解结构与全响应解结构是一样的,都是通解+特解的组合,只是零状态响应的系数发生了变化。而零输入响应对应了原微分方程的通解部分,不含特解,此时初始条件则不再是零了。零状态响应包含了系统解的完整结构,在经典控制中认为已经足够对系统进行分析了。同样,前提是解的结构没有因为零初始条件恰好发生了改变,即零极点相消导致某个模态消失,这样零状态响应包含的系统信息就不完全了。
从稳态结果来看,零输入响应对应于通解,基本只提供了系统稳定性的信息。如果通解稳定,零状态响应因为包括通解也是稳定的。如果通解发散,则零状态响应也同样会发散。
从瞬态变化来看,通解稳定,则零输入响应会迅速衰减,这点和零状态响应的瞬态很相似,但是由于初始条件的差异,会略有不同,但其衰减速度应该是一样的,因为两部分模态是一样的。通解发散,两者发散的速度也一样。于是改变零输入响应的特点,也同样会改变零响应。
总结而言,我们在分析、设计和改进系统时,考虑零状态响应所对应的传递函数是足够的。
传递函数
Laplace变换的性质和运算技巧以及终值定理等,均可参考教科书[1][2],基础知识就没必要赘述了。我们以一个三阶ODE来说明问题。
传递函数有两个重要的组成部分,零点与极点。上式分子的零点称之为该传递函数的零点,分母的零点称之为该传递函数的极点。传递函数是表征系统的一种外部描述数学模型,是基于输入与输出的。微分方程是表征系统的内部模型,也可以说完全表征了系统的特点。关于这点我们在稳定性篇章再细说。
下面讲讲极点与零点的基本特点,现在不需要记极点作用和零点作用。没有讲到频域分析前,写太多规律也无法记住。
传递函数的极点是分母多项式的零点。从微分方程中我们可以看出,分母多项式的零点正是ODE的特征方程的根。由此我们得出一个重要结论,极点数值和数量决定了ODE解的模态结构,更进一步地,模态的结构最后影响了系统响应的动态和稳态
从微分方程的通解中可以得知,如若极点实部为正数,则响应必会发散,反之极点实部为负数则通解部分最终将衰减为零。但衰减的快慢是由极点的位置所决定的。
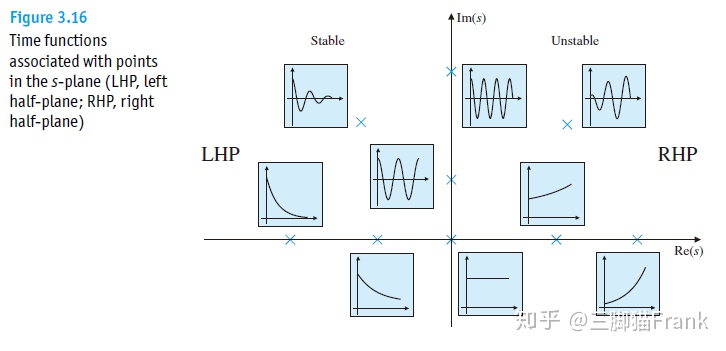
显然极点在s平面上离虚轴越远衰减越快,体现在响应上则系统的快速性会极大提升。极点的虚部对应于时域中的三角函数的角频率,对系统的阻尼会产生影响。在系统性能指标相关的篇章中我们再细说这部分。
传递函数的零点的影响,目前只强调零极点相消(Pole-zero cancellation)。
当零点与其中一个极点非常相近时,则该极点产生的影响将被极大地减弱。理想情况下完全一致时,该极点对应的响应分量将在全响应中消失。在微分方程的解中,发生零极点相消的极点前的系数会消失,或者变成一个很小的数,从而让极点对应的模态不能产生影响。这时候思考一个问题,传递函数是否足够表征原来的系统?联系上篇文章中提到的微分方程与LTI系统响应的关系。
关于零点的其他作用,从[2]对二阶系统的研究中可以得知,零点若位于左半平面,与极点距离较远,离虚轴距离很近,则会产生较大的overshoot。如果零点位于右半平面,overshoot会被抑制,甚至出现undershoot,此时系统是非最小相位系统(non-minimum phase system)
你是不是看完根本就没记住,然而老胡的书就是这么写的 :)。 我们需要更多的知识再回来分析。
实际系统的传递函数,分子的阶次不应大于分母的阶次,并且大部分系统都是满足分子阶次小于分母的。如果分子分母阶次相同,这意味着,传递函数一定可以写成某个常数+真分数的形式,那么与输入信号的Laplace变换相乘后再做反变换,一定会得到输入信号的直流成分,即输出中会包含输入信号被直接放大或者缩小后的成分。实际系统的零极点必须是实数或者共轭复数,不能单独出现某一个复数,故复数是成对出现的。如果分子的阶次大于分母,那么任何一个常值信号,或者阶跃信号都会使系统响应无限增长,这样的系统现实中是不存在的。
总结地讲,极点是对应微分方程的特征方程的特征值,影响系统模态组成。零点会对每个模态的大小产生影响,与极点接近时会引起零极点相消,从而减小该极点对应模态的影响。关于零极点的影响在根轨迹设计,以及频率特性与bode图部分会有更加详细的展开。现在零极点对系统的影响还是从微分方程本身的解上来看,在时域中如果看的不够清楚,我们以后在讲频域时会更加深刻地感受到它们的作用。
Note
[1] . 前提是传递函数能够完全表征系统的模态,即没有零极点相消发生时,否则就应该考虑零输入响应。
[2]. 主要影响瞬态的表现。影响稳态是指稳定性。如果模态是不稳定的,那么就不存在稳态了,直接发散。
[3]. 最小相位打算之后专门写一篇,不过不一定在近期。
[4]. 如果还有疑问,这里也许能给你些启发。为什么传递函数分母中s的阶数n必不小于分子中s的阶数m?
Reference
[1] G.F. Franklin, J.D. Powell, A.Emami-Naeini, Feedback Control of Dynamic Systems, 7th Edition, 2014, Pearson
[2] 胡寿松,自动控制原理(第六版),2013,科学出版社
若有纰漏,烦请指出。转载还请私信联系,请勿私自转载。O(∩_∩)O
最后
以上就是细腻冰棍最近收集整理的关于matlab求传递函数在某个频率点的增益_4. 传递函数的全部内容,更多相关matlab求传递函数在某个频率点的增益_4.内容请搜索靠谱客的其他文章。








发表评论 取消回复