PID的理论工作比较成熟,在实际编程时可能会遇到问题,如果只是简单的二阶惯性系统(
s
¨
=
u
ddot{s}=u
s¨=u),可以比较容易的求出输出,并且与输入做差,再进行一个PID控制。如果是一个
s
¨
=
−
s
+
s
˙
+
u
ddot{s}=-s+dot{s}+u
s¨=−s+s˙+u,可能就有同学不会算输出了。如果用matlab的Simulink的话,可以很简单的拖动框图来设计,比如上面的微分方程如果用Simulink设计一个PID控制器,总体的设计图如下:
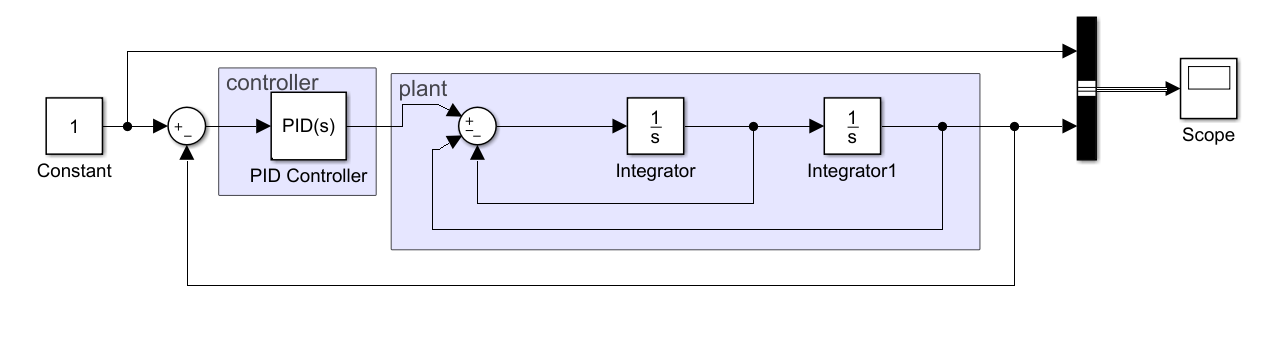
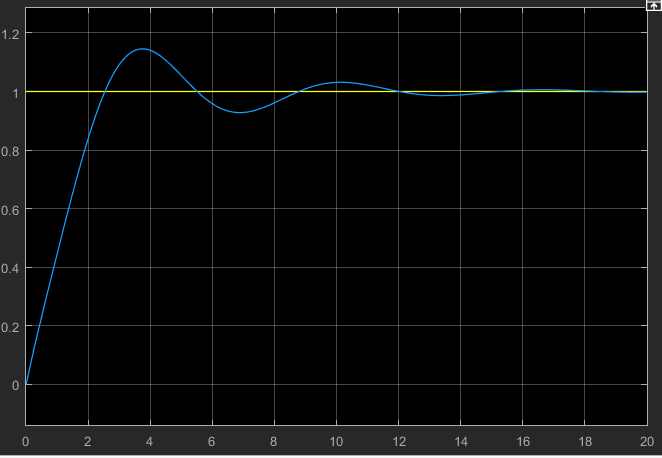
PID的参数选择Kp=0.5,Kd=1,Ki=0.5。仿真时间为20s,仿真图如下:
上面是用Simulink的方式设计PID,下面用写代码的方式来设计。在此,已知微分方程或者传递函数的情况下,把PID的控制器设计过程采用下面三种方法进行。
(1)ode解法
(2)欧拉法
(3)由Z域解得差分方程
已知一个系统的微分方程如下:
{
x
¨
=
−
x
−
x
˙
+
u
y
=
x
left{ begin{array}{lr} ddot{x}= -x-dot{x}+u & \ y= x end{array} right.
{x¨=−x−x˙+uy=x
设控制目标为
v
=
1
v=1
v=1,如何设计这个系统的PID控制器呢?
(1)ode解法
ode是matlab中用于计算微分方程数值解的工具,具体的介绍参考这篇博文【MATLAB】关于ode45的一部分用法,首先将被控对象写成两个一阶的微分方程:
{
x
1
˙
=
x
2
=
x
˙
x
2
˙
=
−
x
1
−
x
2
+
u
left{ begin{array}{lr} dot{x_1}=x_2=dot{x} & \ dot{x_2}=-x_1-x_2+u end{array} right.
{x1˙=x2=x˙x2˙=−x1−x2+u
这个被控对象的matlab代码如下:
function dx = ADRC1_1_4Plant(t,x,para)
u=para;
dx = zeros(2, 1);
dx(1) = x(2);
dx(2) = -x(1)-x(2)+u;
然后是主程序的代码:
%Discrete PID control for continuous plant
clear all;
close all;
Kp = 0.5;
Ki = 1;
Kd = 0.5;
sampleTime = 0.01; %sample time
xInit=zeros(2,1);
e_1=0.0; %last time error
errorSum = 0.0; %the error integral
u_1 = 0; %initial control is 0
for k=1:1:2000
time(k) = k*sampleTime;
inputRef(k)=1; %step signal
para=u_1;
timeSpan=[0 sampleTime];
[tCurrent,xCurrent]=ode45(@(t,x) ADRC1_1_4Plant(t,x,para),timeSpan,xInit);%get(t,x)
xInit = xCurrent(length(xCurrent),:);%xInit as the next time begin
y(k)=xInit(1);
e(k)=inputRef(k)-y(k);
errorSum = errorSum+e(k)*sampleTime;
de(k)=(e(k)-e_1)/sampleTime;
u(k)=Kp*e(k) + Ki*errorSum + Kd*de(k);
%%Control limit
if u(k)>10.0
u(k)=10.0;
end
if u(k)<-10.0
u(k)=-10.0;
end
u_1 = u(k);
e_1 = e(k);
end
figure(1);
plot(time,inputRef,'r',time,y,'k:','linewidth',2);
xlabel('time(s)');ylabel('yd,y');
legend('Ideal position signal','Position tracking');
figure(2);
plot(time,inputRef-y,'r','linewidth',2);
xlabel('time(s)'),ylabel('error');
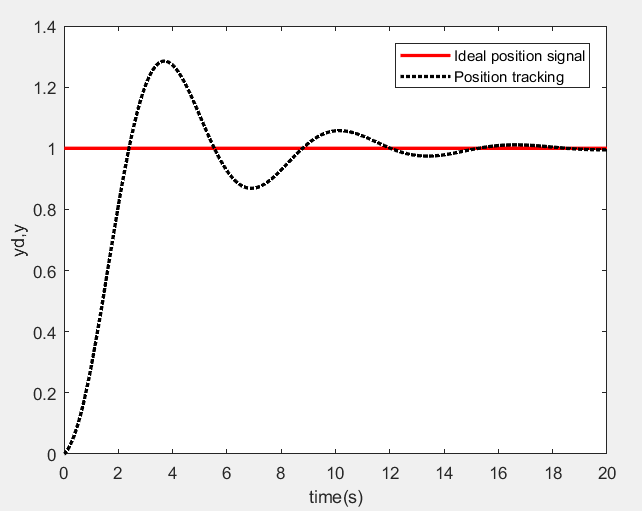
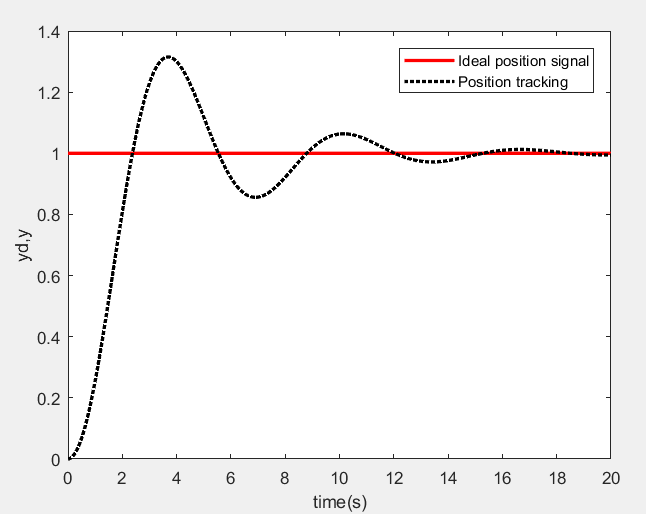
上面代码中比较难懂的可能是计算y的这部分代码,[tCurrent,xCurrent]=ode45(@(t,x) ADRC1_1_4Plant(t,x,para),timeSpan,xInit);%get(t,y)是利用ode45在已经知道初始值xInit和积分区间timeSpan的情况下求出下个时刻的t和x,xInit = xCurrent(length(xCurrent),:);%xInit as the next time begin是把求解出的这些点的最后一个点赋值给xCurrent,来当做下次求值的初始值,y(k)=xInit(1);是把输出y表示出来。然后接下来就是一个误差的比例、积分、微分了。仿真的结果如下:
(2)欧拉法
欧拉法的原理比较简单,精度也有限,具体想了解的可以看一下知乎上的解答什么是欧拉方法。
还是以上面的系统为例,其离散形式可以写成
{
x
1
(
k
+
1
)
=
x
1
(
k
)
+
h
x
2
(
k
)
x
2
(
k
+
1
)
=
x
2
(
k
)
+
h
(
−
x
1
(
k
)
−
x
2
(
k
)
+
u
(
k
)
)
y
=
x
1
(
k
)
left{ begin{array}{lr} x_1{(k+1)}=x_1{(k)}+hx_2{(k)} & \ x_2{(k+1)}=x_2{(k)}+h(-x_1{(k)}-x_2{(k)}+u(k)) & \ y=x_1{(k)} end{array} right.
⎩⎨⎧x1(k+1)=x1(k)+hx2(k)x2(k+1)=x2(k)+h(−x1(k)−x2(k)+u(k))y=x1(k)
其中h是一个小的常数,按照这种求y的方式,可以直接写出被控对象的PID代码:
%Discrete PID control for continuous plant
clear all;
close all;
Kp = 0.5;
Ki = 1;
Kd = 0.5;
loop=2000;
h = 0.01; %constant
e_1=0.0; %last time error
errorSum = 0.0; %the error integral
for k=1:1:loop
time(k) = k*h;
inputRef(k)=1; %step signal
x1(1)=0;
x2(1)=0;
u(1)=0;
x1(k+1) = x1(k)+h*x2(k);
x2(k+1) = x2(k)+h*(-x1(k)-x2(k)+u(k));
y(k) = x1(k);
e(k)=inputRef(k)-y(k);
errorSum = errorSum+e(k)*h;
de(k)=(e(k)-e_1)/h;
u(k+1)=Kp*e(k) + Ki*errorSum + Kd*de(k);
%%Control limit
if u(k)>10.0
u(k)=10.0;
end
if u(k)<-10.0
u(k)=-10.0;
end
e_1 = e(k);
end
figure(1);
plot(time,inputRef,'r',time,y,'k:','linewidth',2);
xlabel('time(s)');ylabel('yd,y');
legend('Ideal position signal','Position tracking');
figure(2);
plot(time,inputRef-y,'r','linewidth',2);
xlabel('time(s)'),ylabel('error');
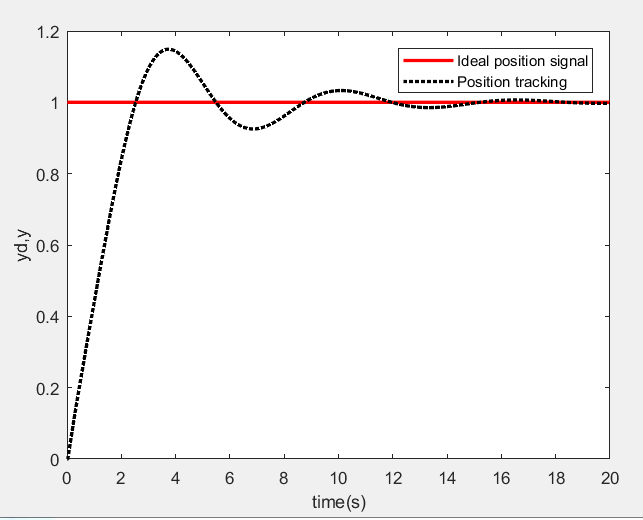
得到的仿真图像与上面的一样,见下图:
(3)由Z域解得差分方程
这个方法是从先进PID控制与matlab仿真这本书里看到的,具体的做法是先把微分方程写成s域的形式,再转换到z域,利用z反变换写出y的递推公式。
还是以上面的微分方程为例,s域的形式为
G
(
s
)
=
1
s
2
+
s
+
1
G(s)=frac{1}{s^2+s+1}
G(s)=s2+s+11,再利用matlab的函数c2d变换到z域,利用z域反推递推公式,就能得到y了。代码如下:
%the plant transfer function G(s)=1/(s^2+s+1)
clear all;
sampleTime = 0.001; %sample time is 0.001s
sys = tf(1,[1, 1, 1]); %transfer function
discreteSys = c2d(sys, sampleTime,'z'); %from continuous to discrete
[num, den] = tfdata(discreteSys, 'v');
u_1=0.0;
u_2=0.0;
y_1=0.0;
y_2=0.0;
errorSum = 0.0; %the error integral
e_1=0;
Kp=0.5; Ki=1; Kd=0.5;
for k=1:1:20000
time(k) = k*sampleTime;
inputRef(k) = 1;
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2; %实际输出
e(k)=inputRef(k)-y(k);
errorSum = errorSum+e(k)*sampleTime;
de(k)=(e(k)-e_1)/sampleTime;
u(k)=Kp*e(k) + Ki*errorSum + Kd*de(k);
%%Control limit
if u(k)>10.0
u(k)=10.0;
end
if u(k)<-10.0
u(k)=-10.0;
end
u_2=u_1; %保存上上次输入 为下次计算
u_1=u(k); %保存上一次控制系数 为下次计算
y_2=y_1; %保存上上次输出 为下次计算
y_1=y(k); %保存上一次输出 为下次计算
e_1=e(k);
end
figure(1);
plot(time,inputRef,'r',time,y,'k:','linewidth',2);
xlabel('time(s)');ylabel('yd,y');
legend('Ideal position signal','Position tracking');
figure(2);
plot(time,inputRef-y,'r','linewidth',2);
xlabel('time(s)'),ylabel('error');
中间实际输出就是y的一个递推公式,这样得到的仿真图与之前的都类似,但是超调量之类的可能不是特别一致,估计是每种方法的计算精度不一致,有同学能深究一下最好了。
最后
以上就是丰富萝莉最近收集整理的关于已知微分方程或传递函数的PID控制器设计的全部内容,更多相关已知微分方程或传递函数内容请搜索靠谱客的其他文章。
![自动控制原理MATLAB实验一、求传递函数 二、状态方程描述的系统模型 三、不同模型之间的互换 G1=zpk([],[0,-1,-2],4)%模型一 四、建立复杂的数学模型 五、稳定性分析 六、求解时域响应 七、根轨迹分析](https://www.shuijiaxian.com/files_image/reation/bcimg25.png)







发表评论 取消回复