概述
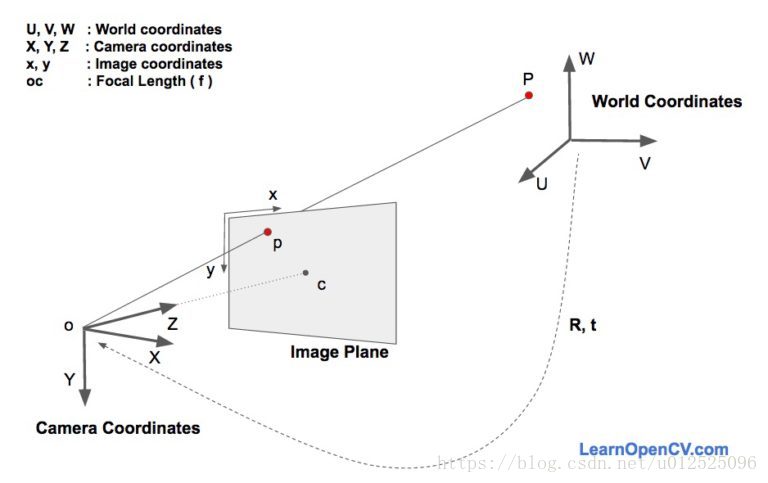
在计算机视觉中,物体的姿态是指相对于相机的相对取向和位置。
本文主要参考了《Head Pose Estimation using OpenCV and Dlib》这篇文章。
进行人脸姿态估计的目的就是获取人脸相对相机的朝向:
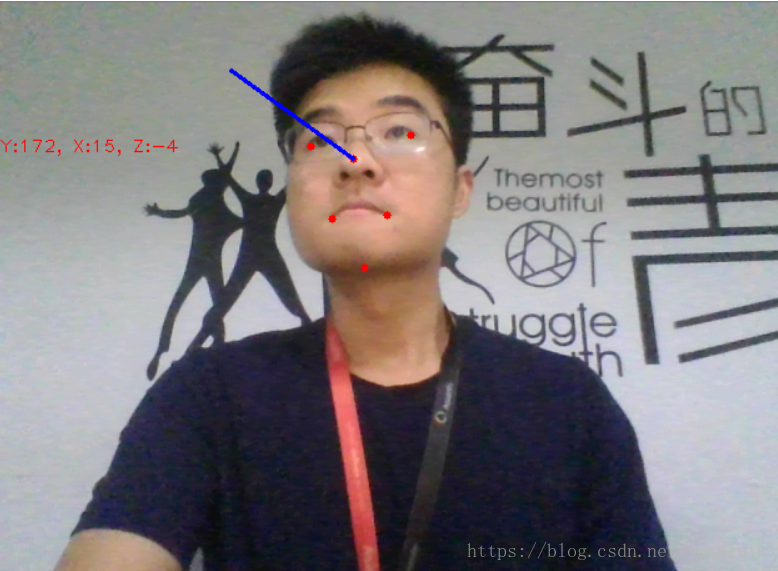
人脸姿态估计的思想:旋转三维标准模型一定角度,直到模型上“三维特征点”的“2维投影”,与待测试图像上的特征点(图像上的特征点显然是2维)尽量重合。
代码
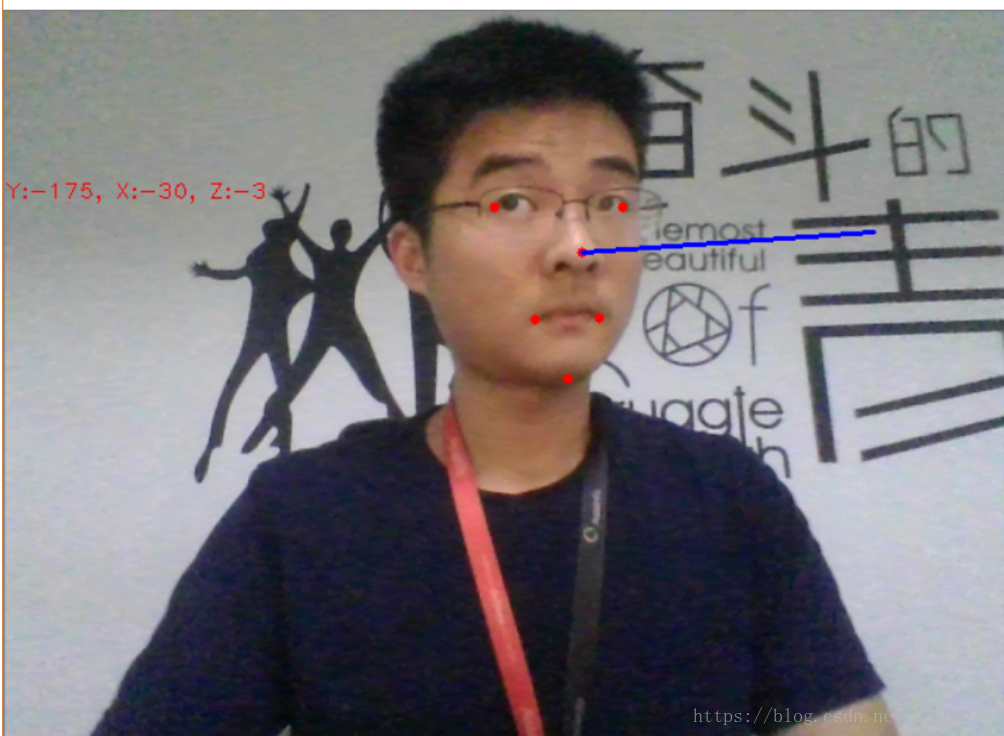
从笔记本摄像头取视频,每一帧用dlib检测人脸关键点,用opencv做姿态估计。并实时显示在屏幕上。
姿态估计部分的代码参考了《Head Pose Estimation using OpenCV and Dlib》这篇文章。
opencv输出的是旋转向量,我参考《基于Dlib和OpenCV的人脸姿态估计(HeadPoseEstimation)》这篇文章的方法,将旋转向量转化为4元数,再转化为欧拉角(弧度)。
这篇文章的坑就是,最终转化出来的欧拉角单位是弧度,需要除以Pi乘以180得到度的单位值。原文的代码是c++,我转化为python3了。
下面的例子是我最终测试完毕没问题的代码。
#!/usr/bin/env python
import cv2
import numpy as np
import dlib
import time
import math
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor("shape_predictor_68_face_landmarks.dat")
POINTS_NUM_LANDMARK = 68
# 获取最大的人脸
def _largest_face(dets):
if len(dets) == 1:
return 0
face_areas = [ (det.right()-det.left())*(det.bottom()-det.top()) for det in dets]
largest_area = face_areas[0]
largest_index = 0
for index in range(1, len(dets)):
if face_areas[index] > largest_area :
largest_index = index
largest_area = face_areas[index]
print("largest_face index is {} in {} faces".format(largest_index, len(dets)))
return largest_index
# 从dlib的检测结果抽取姿态估计需要的点坐标
def get_image_points_from_landmark_shape(landmark_shape):
if landmark_shape.num_parts != POINTS_NUM_LANDMARK:
print("ERROR:landmark_shape.num_parts-{}".format(landmark_shape.num_parts))
return -1, None
#2D image points. If you change the image, you need to change vector
image_points = np.array([
(landmark_shape.part(30).x, landmark_shape.part(30).y), # Nose tip
(landmark_shape.part(8).x, landmark_shape.part(8).y), # Chin
(landmark_shape.part(36).x, landmark_shape.part(36).y), # Left eye left corner
(landmark_shape.part(45).x, landmark_shape.part(45).y), # Right eye right corne
(landmark_shape.part(48).x, landmark_shape.part(48).y), # Left Mouth corner
(landmark_shape.part(54).x, landmark_shape.part(54).y) # Right mouth corner
], dtype="double")
return 0, image_points
# 用dlib检测关键点,返回姿态估计需要的几个点坐标
def get_image_points(img):
#gray = cv2.cvtColor( img, cv2.COLOR_BGR2GRAY ) # 图片调整为灰色
dets = detector( img, 0 )
if 0 == len( dets ):
print( "ERROR: found no face" )
return -1, None
largest_index = _largest_face(dets)
face_rectangle = dets[largest_index]
landmark_shape = predictor(img, face_rectangle)
return get_image_points_from_landmark_shape(landmark_shape)
# 获取旋转向量和平移向量
def get_pose_estimation(img_size, image_points ):
# 3D model points.
model_points = np.array([
(0.0, 0.0, 0.0), # Nose tip
(0.0, -330.0, -65.0), # Chin
(-225.0, 170.0, -135.0), # Left eye left corner
(225.0, 170.0, -135.0), # Right eye right corne
(-150.0, -150.0, -125.0), # Left Mouth corner
(150.0, -150.0, -125.0) # Right mouth corner
])
# Camera internals
focal_length = img_size[1]
center = (img_size[1]/2, img_size[0]/2)
camera_matrix = np.array(
[[focal_length, 0, center[0]],
[0, focal_length, center[1]],
[0, 0, 1]], dtype = "double"
)
print("Camera Matrix :{}".format(camera_matrix))
dist_coeffs = np.zeros((4,1)) # Assuming no lens distortion
(success, rotation_vector, translation_vector) = cv2.solvePnP(model_points, image_points, camera_matrix, dist_coeffs, flags=cv2.SOLVEPNP_ITERATIVE )
print("Rotation Vector:n {}".format(rotation_vector))
print("Translation Vector:n {}".format(translation_vector))
return success, rotation_vector, translation_vector, camera_matrix, dist_coeffs
# 从旋转向量转换为欧拉角
def get_euler_angle(rotation_vector):
# calculate rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transformed to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2)*rotation_vector[0][0] / theta
y = math.sin(theta / 2)*rotation_vector[1][0] / theta
z = math.sin(theta / 2)*rotation_vector[2][0] / theta
ysqr = y * y
# pitch (x-axis rotation)
t0 = 2.0 * (w * x + y * z)
t1 = 1.0 - 2.0 * (x * x + ysqr)
print('t0:{}, t1:{}'.format(t0, t1))
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w * y - z * x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w * z + x * y)
t4 = 1.0 - 2.0 * (ysqr + z * z)
roll = math.atan2(t3, t4)
print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))
# 单位转换:将弧度转换为度
Y = int((pitch/math.pi)*180)
X = int((yaw/math.pi)*180)
Z = int((roll/math.pi)*180)
return 0, Y, X, Z
def get_pose_estimation_in_euler_angle(landmark_shape, im_szie):
try:
ret, image_points = get_image_points_from_landmark_shape(landmark_shape)
if ret != 0:
print('get_image_points failed')
return -1, None, None, None
ret, rotation_vector, translation_vector, camera_matrix, dist_coeffs = get_pose_estimation(im_szie, image_points)
if ret != True:
print('get_pose_estimation failed')
return -1, None, None, None
ret, pitch, yaw, roll = get_euler_angle(rotation_vector)
if ret != 0:
print('get_euler_angle failed')
return -1, None, None, None
euler_angle_str = 'Y:{}, X:{}, Z:{}'.format(pitch, yaw, roll)
print(euler_angle_str)
return 0, pitch, yaw, roll
except Exception as e:
print('get_pose_estimation_in_euler_angle exception:{}'.format(e))
return -1, None, None, None
if __name__ == '__main__':
# rtsp://admin:ts123456@10.20.21.240:554
cap = cv2.VideoCapture(0)
while (cap.isOpened()):
start_time = time.time()
# Read Image
ret, im = cap.read()
if ret != True:
print('read frame failed')
continue
size = im.shape
if size[0] > 700:
h = size[0] / 3
w = size[1] / 3
im = cv2.resize( im, (int( w ), int( h )), interpolation=cv2.INTER_CUBIC )
size = im.shape
ret, image_points = get_image_points(im)
if ret != 0:
print('get_image_points failed')
continue
ret, rotation_vector, translation_vector, camera_matrix, dist_coeffs = get_pose_estimation(size, image_points)
if ret != True:
print('get_pose_estimation failed')
continue
used_time = time.time() - start_time
print("used_time:{} sec".format(round(used_time, 3)))
ret, pitch, yaw, roll = get_euler_angle(rotation_vector)
euler_angle_str = 'Y:{}, X:{}, Z:{}'.format(pitch, yaw, roll)
print(euler_angle_str)
# Project a 3D point (0, 0, 1000.0) onto the image plane.
# We use this to draw a line sticking out of the nose
(nose_end_point2D, jacobian) = cv2.projectPoints(np.array([(0.0, 0.0, 1000.0)]), rotation_vector, translation_vector, camera_matrix, dist_coeffs)
for p in image_points:
cv2.circle(im, (int(p[0]), int(p[1])), 3, (0,0,255), -1)
p1 = ( int(image_points[0][0]), int(image_points[0][1]))
p2 = ( int(nose_end_point2D[0][0][0]), int(nose_end_point2D[0][0][1]))
cv2.line(im, p1, p2, (255,0,0), 2)
# Display image
#cv2.putText( im, str(rotation_vector), (0, 100), cv2.FONT_HERSHEY_PLAIN, 1, (0, 0, 255), 1 )
cv2.putText( im, euler_angle_str, (0, 120), cv2.FONT_HERSHEY_PLAIN, 1, (0, 0, 255), 1 )
cv2.imshow("Output", im)
cv2.waitKey(1)
参考资料
人脸姿态估计浅谈~
opencv官方文档: Pose Estimation
dlib+opencv头部姿态估计的国外博客: Head Pose Estimation using OpenCV and Dlib
中文翻译: 使用OpenCV和Dlib进行人头姿态估计
将旋转向量转换为欧拉角参考了:基于Dlib和OpenCV的人脸姿态估计(HeadPoseEstimation)
这个和上面方法不一样,我没试:怎么计算脸部姿势 with cv2.solvePnP in python3
原理讲解:四元数与欧拉角之间的转换
最后
以上就是完美冥王星最近收集整理的关于使用opencv和dlib进行人脸姿态估计(python)概述代码参考资料的全部内容,更多相关使用opencv和dlib进行人脸姿态估计(python)概述代码参考资料内容请搜索靠谱客的其他文章。







![python表情换头_人脸头部姿态估计的 Python 实现[转]](https://www.shuijiaxian.com/files_image/reation/bcimg21.png)
发表评论 取消回复