1 简介
ode45,常微分方程的数值求解。MATLAB提供了求常微分方程数值解的函数。当难以求得微分方程的解析解时,可以求其数值解(解析解就是给出解的具体函数形式,从解的表达式中就可以算出任何对应值;数值解就是用数值方法求出近似解,给出一系列对应的自变量和解)。
Matlab中求微分方程数值解的函数有七个:ode45,ode23,ode113,ode15s,ode23s,ode23t,ode23tb 。
ode是Matlab专门用于解微分方程的功能函数。该求解器有变步长(variable-step)和定步长(fixed-step)两种类型。不同类型有着不同的求解器,其中ode45求解器属于变步长的一种,采用Runge-Kutta算法;其他采用相同算法的变步长求解器还有ode23。
ode45表示采用四阶-五阶Runge-Kutta算法,它用4阶方法提供候选解,5阶方法控制误差,是一种自适应步长(变步长)的常微分方程数值解法,其整体截断误差为(Δx)^5。解决的是Nonstiff(非刚性)常微分方程。
2 用法
[T,Y] = ode45(odefun,tspan,y0)
odefun 是函数句柄,可以是函数文件名,匿名函数句柄或内联函数名
tspan 是区间 [t0 tf] 或者一系列散点[t0,t1,...,tf]
y0 是初始值向量
T 返回列向量的时间点
Y 返回对应T的求解列向量
————————————————
版权声明:本文为CSDN博主「Chauncey Ge」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Loggsy/article/details/80791924
3 控制程序
控制对象电机的传递函数:
控制程序:PID_ode45.m
%增量式PID
clc % 清屏
clear all; % 删除workplace变量
close all; % 关掉显示图形窗口
ts=0.001; %采样时间
xk=zeros(2,1);
e_1=0;
u_1=0;%初始值
%%
for k=1:1:1000
time(k)=k*ts;%时间轴,画图用
yd(k)=0.5*sin(1*2*pi*k*ts);%控制目标(理想位置)
%PID参数
kp=20;
ki=0;
kd=0.5;
para=u_1;
tSpan=[0 ts];
%常微分方程的数值求解,[t,y,te,ye,ie] = ode45(odefun,tspan,y0,options)
[tt,xx]=ode45('PID_ode45_plant',tSpan,xk,[],para);
xk=xx(length(xx),:);%xk为求解值
y(k)=xk(1);
e(k)=yd(k)-y(k);
de(k)=(e(k)-e_1)/ts;
u(k)=kp*e(k)+kd*de(k);
%避免PID值饱和,限制输出
if u(k)>10
u(k)=10;
end
if u(k)<-10
u(k)=-10;
end
u_1=u(k);
e_1=e(k);
end
figure(1);
plot(time,yd,'r',time,y,'k:','linewidth',2);
xlabel('时间(s)'); ylabel('yd,y');
grid on
title('仿真结果');
legend('实际信号','仿真结果');
figure(2);%误差
plot(time,yd-y,'r','linewidth',2);
xlabel('时间(s)');ylabel('误差');
grid on
title('误差');
控制对象:PID_ode45_plant.m
function dy = PlantModel(t,y,flag,para)
u=para;
J=0.0067;B=0.1;
dy=zeros(2,1);
dy(1) = y(2);
dy(2) = -(B/J)*y(2) + (1/J)*u;运行结果: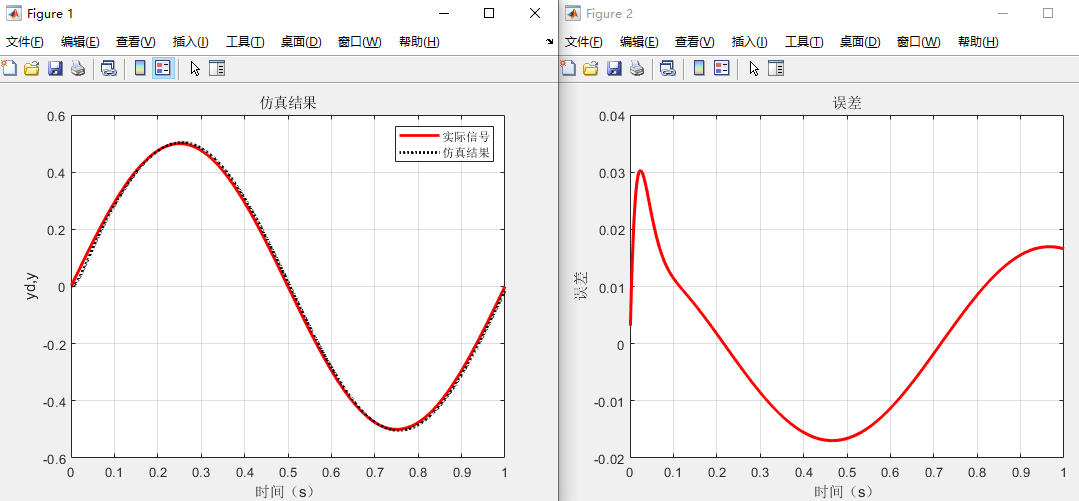
参考材料《MATLAB_SIMULINK系统仿真》
最后
以上就是迷路月饼最近收集整理的关于MATLAB-基于传递函数的PID控制系统仿真1 简介2 用法3 控制程序的全部内容,更多相关MATLAB-基于传递函数的PID控制系统仿真1内容请搜索靠谱客的其他文章。








发表评论 取消回复