本文是阅读以下论文的笔记:
[1]密振兴, “基于深度学习的大规模点云表面重建算法研究,” 硕士, 华中科技大学, 2020.
局部拟合算法
在点的局部邻域内拟合隐式函数。
就是说每个点的函数值之和自己的邻域有关。
SDF, Signed Destance Function, 符号距离函数
总结:到最邻近样本点切平面的有符号距离。
输入:点云及其法向。
SDF定义:
R
3
R^3
R3空间任意一点x,到其最近的样本点pi的距离,加上一个符号(法向为正,反之为负)

图示:
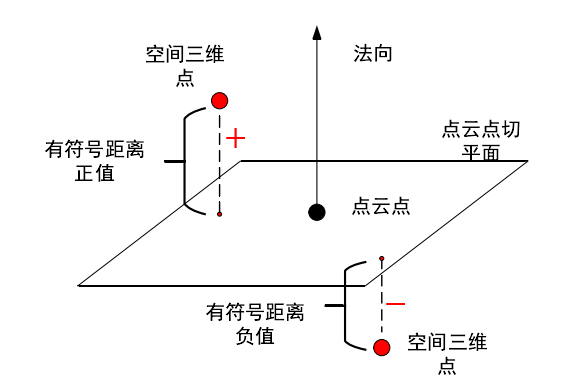
表面:φ的0等值面。
缺点:对法向敏感,需要法向很对。
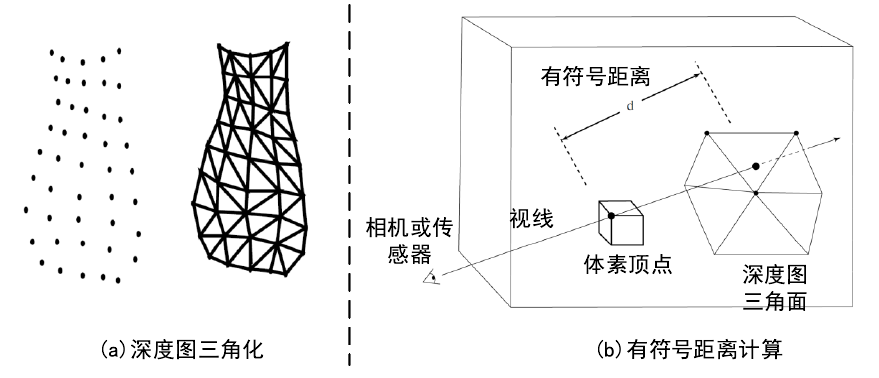
TSDF: Truncated Signed Distance Function,截断有符号距离函数
总结:体素点到整个物体表面的加权有符号距离
- 输入:多张深度图及其相机参数
- 思路:其实这个算法一张深度图就行,多张图是为了增加鲁棒性。
步骤:
-
用多张深度图合并成点云,建立体素网格
-
每张深度图在2位空间中三角化(图a),得到多个三角网格
-
对每个体素中的顶点,根据相机参数,求出它第二步的每个三角面的有符号距离(图b)
-
将上一步求出的到第i个三角面的距离di加权平均,最为该体素点最终的向量值。权重是扫描置信度。
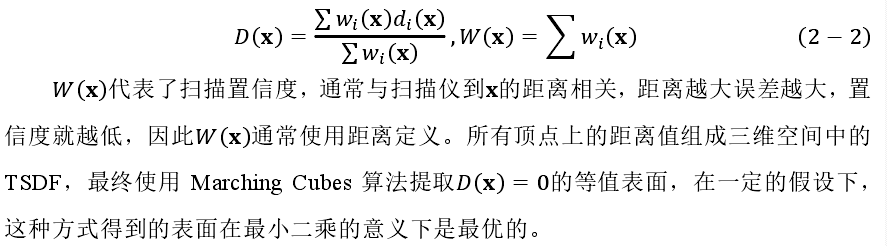
表面:同上,0等值面。
MLS: Moving least squres 移动最小二乘法
-
这个方法是要用多项式拟合一个函数f,把空间中任一点x映射为拟合值v。
-
不同方法设立了不同拟合值v,v可以是矢量也可以是标量。
-
用多项式拟合,目标是使邻居的拟合值最对。(w是距离的函数)

-
通常x选网格点。
部分v的选取的举例:
- 用x的邻居拟合一个平面,v定义为x到该平面的距离
全局方法
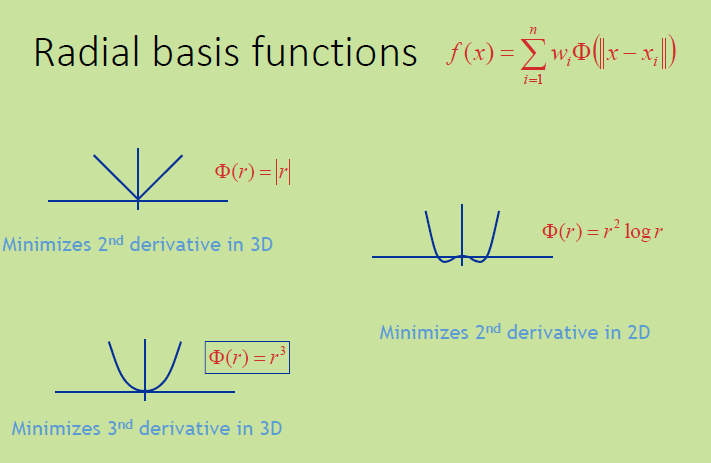
RBF: Radial Bases Function (RBF)
前面的SDF是直接用网格点作为x,求SDF,然后Marching cubes。
这里是再套一层函数来拟合一个函数。
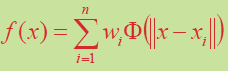
用这个函数来拟合。
xi是signed distance field 里面的点。
φ是radially symmetric funciton。两边翘起,中间小。对称。即可。
最后
以上就是明理巨人最近收集整理的关于[读论文]点云表面重建: SDF, TSDF, MLS, RBF局部拟合算法全局方法的全部内容,更多相关[读论文]点云表面重建:内容请搜索靠谱客的其他文章。




![[读论文]点云表面重建: SDF, TSDF, MLS, RBF局部拟合算法全局方法](https://www.shuijiaxian.com/files_image/reation/bcimg18.png)



发表评论 取消回复