???? 优质资源分享 ????
| 学习路线指引(点击解锁) | 知识定位 | 人群定位 |
|---|---|---|
| ???? Python实战微信订餐小程序 ???? | 进阶级 | 本课程是python flask+微信小程序的完美结合,从项目搭建到腾讯云部署上线,打造一个全栈订餐系统。 |
| ????Python量化交易实战???? | 入门级 | 手把手带你打造一个易扩展、更安全、效率更高的量化交易系统 |
基于OpenCV实现图片及视频中选定区域颜色识别
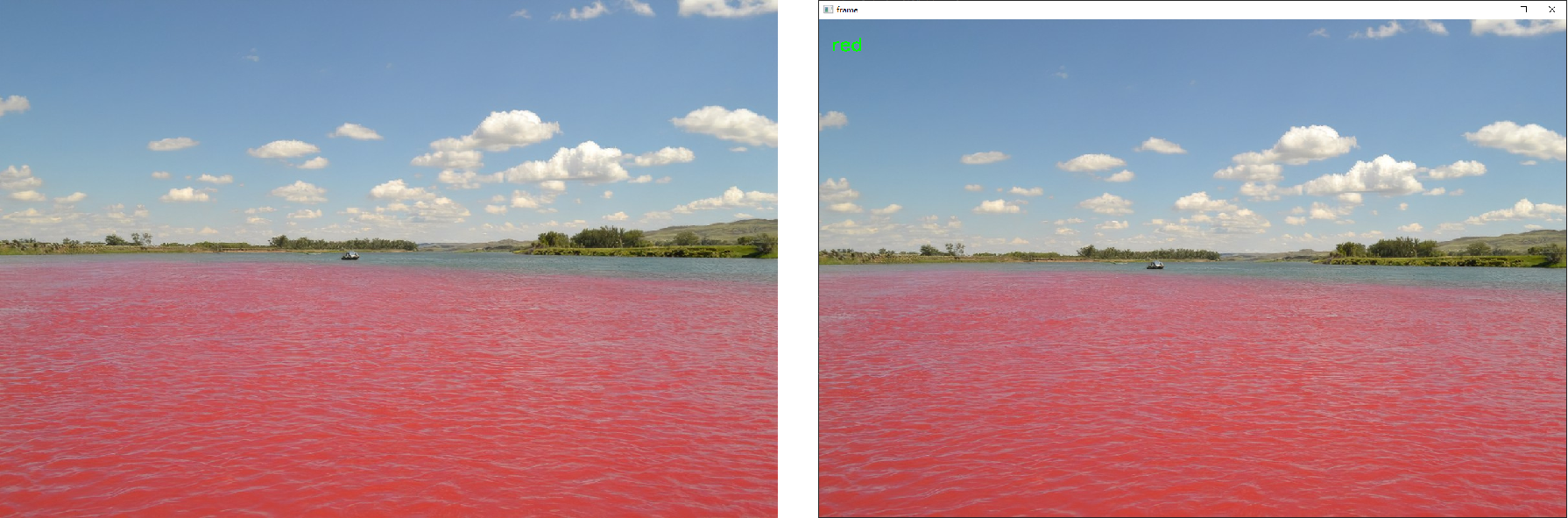
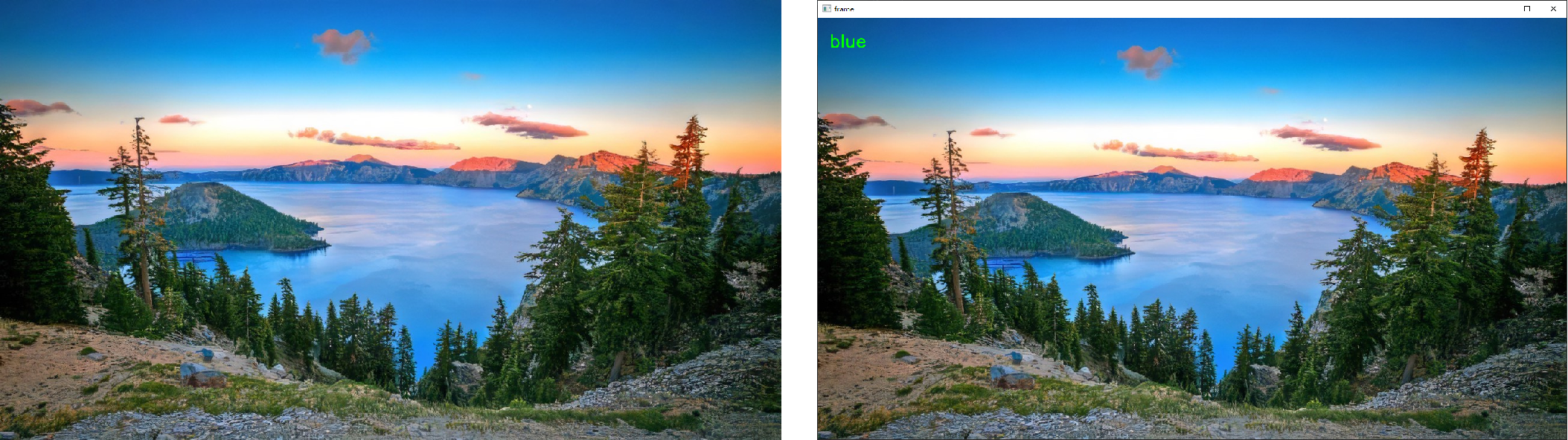
近期,需要实现检测摄像头中指定坐标区域内的主体颜色,通过查阅大量相关的内容,最终实现代码及效果如下,具体的实现步骤在代码中都详细注释,代码还可以进一步优化,但提升有限。
主要实现过程:按不同颜色的取值范围,对图像进行循环遍历,转换为灰度图,将本次遍历的颜色像素转换为白色,对白色部分进行膨胀处理,使其更加连续,计算白色部分外轮廓包围的面积累加求和,比较每种颜色围起来面积,保存最大值及其颜色,所有颜色遍历完后,返回最大值对应的颜色,显示在图像上
如果有类似的颜色识别的任务,可参考以下代码修改后实现具体需求
colorList.py
import numpy as np
import collections
# 将rgb图像转换为hsv图像后,确定不同颜色的取值范围
def getColorList():
dict = collections.defaultdict(list)
# black
lower_black = np.array([0, 0, 0])
upper_black = np.array([180, 255, 46])
color_list_black = []
color_list_black.append(lower_black)
color_list_black.append(upper_black)
dict['black'] = color_list_black
# gray
lower_gray = np.array([0, 0, 46])
upper_gray = np.array([180, 43, 220])
color_list_gray= []
color_list_gray.append(lower_gray)
color_list_gray.append(upper_gray)
dict['gray'] = color_list_gray
# white
lower_white = np.array([0, 0, 221])
upper_white = np.array([180, 30, 255])
color_list_white = []
color_list_white.append(lower_white)
color_list_white.append(upper_white)
dict['white'] = color_list_white
# red
lower_red = np.array([156, 43, 46])
upper_red = np.array([180, 255, 255])
color_list_red = []
color_list_red.append(lower_red)
color_list_red.append(upper_red)
dict['red'] = color_list_red
# red2
lower_red = np.array([0, 43, 46])
upper_red = np.array([10, 255, 255])
color_list_red2 = []
color_list_red2.append(lower_red)
color_list_red2.append(upper_red)
dict['red2'] = color_list_red2
# orange
lower_orange = np.array([11, 43, 46])
upper_orange = np.array([25, 255, 255])
color_list_orange = []
color_list_orange.append(lower_orange)
color_list_orange.append(upper_orange)
dict['orange'] = color_list_orange
# yellow
lower_yellow = np.array([26, 43, 46])
upper_yellow = np.array([34, 255, 255])
color_list_yellow = []
color_list_yellow.append(lower_yellow)
color_list_yellow.append(upper_yellow)
dict['yellow'] = color_list_yellow
# green
lower_green = np.array([35, 43, 46])
upper_green = np.array([77, 255, 255])
color_list_green = []
color_list_green.append(lower_green)
color_list_green.append(upper_green)
dict['green'] = color_list_green
# cyan
lower_cyan = np.array([78, 43, 46])
upper_cyan = np.array([99, 255, 255])
color_list_cyan = []
color_list_cyan.append(lower_cyan)
color_list_cyan.append(upper_cyan)
dict['cyan'] = color_list_cyan
# blue
lower_blue = np.array([100, 43, 46])
upper_blue = np.array([124, 255, 255])
color_list_blue = []
color_list_blue.append(lower_blue)
color_list_blue.append(upper_blue)
dict['blue'] = color_list_blue
# purple
lower_purple = np.array([125, 43, 46])
upper_purple = np.array([155, 255, 255])
color_list_purple = []
color_list_purple.append(lower_purple)
color_list_purple.append(upper_purple)
dict['purple'] = color_list_purple
return dict
if __name__ == '__main__':
color_dict = getColorList()
print(color_dict)
num = len(color_dict)
print('num=', num)
for d in color_dict:
print('key=', d)
print('value=', color_dict[d][1])
折叠
image_color_realize.py
import cv2
import colorList
# 实现对图片中目标区域颜色的识别
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = 0
color = None
color_dict = colorList.getColorList()
# count = 0
for d in color_dict:
mask = cv2.inRange(hsv, color_dict[d][0], color_dict[d][1]) # 在后两个参数范围内的值变成255
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1] # 在灰度图片中,像素值大于127的都变成255,[1]表示调用图像,也就是该函数第二个返回值
# cv2.imshow("0",binary)
# cv2.waitKey(0)
# count+=1
binary = cv2.dilate(binary, None, iterations=2) # 使用默认内核进行膨胀操作,操作两次,使缝隙变小,图像更连续
cnts = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2] # 获取该函数倒数第二个返回值轮廓
sum = 0
for c in cnts:
sum += cv2.contourArea(c) # 获取该颜色所有轮廓围成的面积的和
# print("%s , %d" %(d, sum ))
if sum > maxsum:
maxsum = sum
color = d
if color == 'red2':
color = 'red'
elif color == 'orange':
color = 'yellow'
elif color == 'purple' or color == 'blue' or color == 'cyan' or color == 'white' or color == 'green':
color = 'normal'
return color
if __name__ == '__main__':
filename = "C:/Users/admin/Desktop/water_samples/live01.jpg"
frame = cv2.imread(filename)
# frame = frame[180:280, 180:380] # [y:y+h, x:x+w] 注意x,y顺序
color = get_color(frame)
# 绘制文本
cv2.putText(img=frame,text=color,org=(20,50),fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=1.0,color=(0,255,0),thickness=2)
# cv2.namedWindow('frame',cv2.WINDOW_NORMAL) # 设置显示窗口可调节
cv2.imshow('frame',frame)
cv2.waitKey(0)
折叠
video_color_realize.py
import cv2
import xf_color
# 对视频或摄像头获取的影像目标区域颜色进行识别
cap = cv2.VideoCapture("C:/Users/admin/Desktop/water_samples/01.mp4")
# cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1100) # 这里窗口大小调节只对摄像头有效
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 750)
while cap.isOpened():
ret, frame0 = cap.read()
# 对图像帧进行翻转(因为opencv图像和我们正常是反着的) 视频是正常的,摄像头是反转的
# frame0 = cv2.flip(src=frame0, flipCode=2)
# frame = frame[180:280, 180:380] # [y:y+h, x:x+w]
# frame = frame0[200:400, 100:300] # 设置检测颜色的区域,四个顶点坐标
frame = frame0
# frame=cv2.resize(src=frame,dsize=(750,600))
hsv_frame = cv2.cvtColor(src=frame, code=cv2.COLOR_BGR2HSV)
# 获取读取的帧的高宽
height, width, channel = frame.shape
color = xf_color.get_color(hsv_frame)
# 绘制文本
cv2.putText(img=frame0, text=color, org=(20, 50), fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=1.0, color=(0, 255, 0), thickness=2)
cv2.imshow('frame', frame0)
key = cv2.waitKey(1)
if key == 27:
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')
效果如下:
示例图片1
示例图片2
示例图片3

最后
以上就是炙热刺猬最近收集整理的关于基于OpenCV实现对图片及视频中感兴趣区域颜色识别的全部内容,更多相关基于OpenCV实现对图片及视频中感兴趣区域颜色识别内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复