漫长的几场考试终于结束,也是开始继续之前因考试搁置的项目。
这是2022年第一篇博客,也希望自己更加精益求精、不轻视小问题、脚踏实地、无论事情简单与否都不浮躁地干完。
采用定时器主从模式来达到pwm脉冲的精确输出,主定时器用来控制从定时器的pwm脉冲输出数量,从定时器用来产生pwm脉冲。
| 从定时器 | ITR0 | ITR1 | ITR2 | ITR3 |
| TIM2 | TIM1 | TIM8 | TIM3 | TIM4 |
| TIM3 | TIM1 | TIM2 | TIM5 | TIM4 |
| TIM4 | TIM1 | TIM2 | TIM3 | TIM8 |
| TIM5 | TIM2 | TIM3 | TIM4 | TIM8 |
| CH1 | CH2 | CH3 | CH4 | |
| TIM2 | PA0/PA5/PA15 | PA1/PB3 | PA2/PB10 | PA3/PB11 |
| TIM3 | PA6/PB4/PC6 | PA7/PB5/PC7 | PB0/PC8 | PB1/PC9 |
| TIM4 | PB6/PD12 | PB7/PD13 | PB8/PD14 | PB9/PD15 |
| TIM5 | PA0/PH10 | PA1/PH11 | PA2/PH12 | PA3/PI0 |
以TIM2和TIM3为例。引脚各取PA0和PC6。
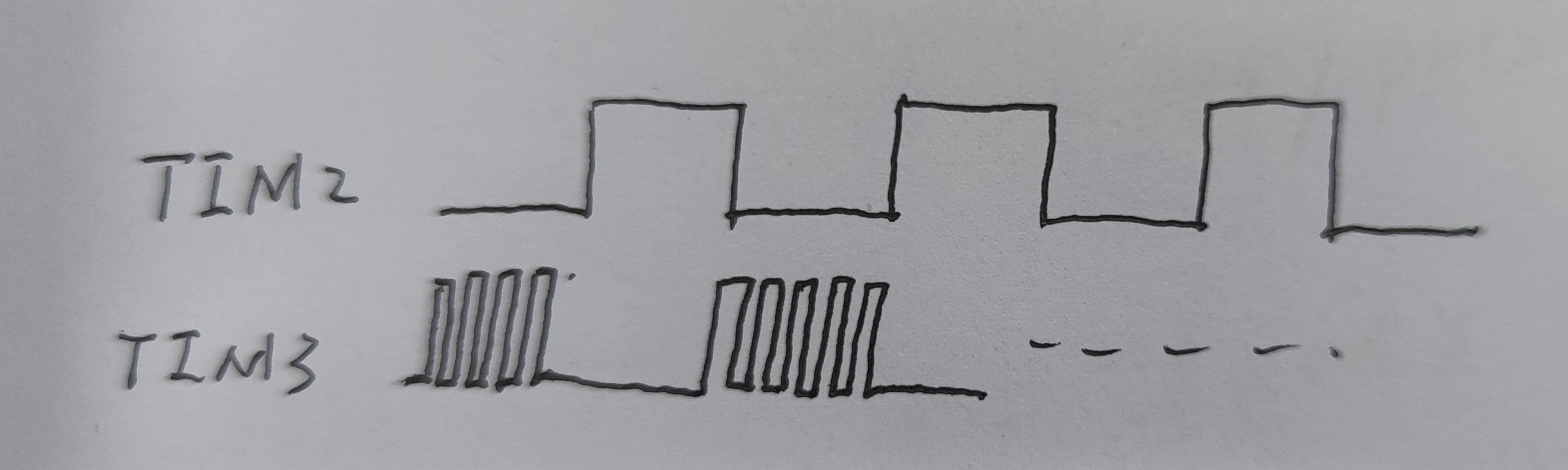
将TIM2设置为主模式,把PWM的参考电平OC1REF作为TRGO触发输出。
将TIM3设置为从模式的门控模式,将TIM2的TRG0作为触发输入,控制定时器的开启和关闭。
只有当TIM2的PWM波为低电平时,TIM3才输出PWM波。这样当TIM3的PWM脉冲频率一定时,只要控制TIM2的PWM波的占空比就可以控制TIM3的PWM脉冲输出数量。
程序如下:
TIM2主模式初始化:
void TIM2_Config(u32 cycle)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能定时器时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能IO口时钟
GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM2);//PA0复用为定时器2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0
TIM_TimeBaseStructure.TIM_Prescaler=8400-1; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseStructure.TIM_Period=cycle; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure); //初始化定时器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择PWM模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性低
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //初始化定时器通道
/*定时器主模式设置*/
TIM_SelectMasterSlaveMode(TIM2, TIM_MasterSlaveMode_Enable);
TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_OC1Ref);
TIM_Cmd(TIM2, ENABLE);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);//使能定时器在ccr上的预装载寄存器
TIM_ARRPreloadConfig(TIM2,ENABLE);//ARPE使能
TIM_SetCompare1(TIM2,1000);
}TIM3从模式初始化:
void TIM3_Config(u32 PulseNum)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能定时器时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);//使能IO口时钟
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_TIM3);//PC6复用为定时器3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化PC6
TIM_TimeBaseStructure.TIM_Prescaler=8400-1; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseStructure.TIM_Period=PulseNum; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure); //初始化定时器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择PWM模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性低
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //初始化定时器通道
/*定时器从模式设置*/
TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1);
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Gated );
TIM_Cmd(TIM3, ENABLE);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能定时器在ccr上的预装载寄存器
TIM_ARRPreloadConfig(TIM3,ENABLE);//ARPE使能
TIM_SetCompare1(TIM3,20);
}PWM控制输出:
void Pulse_output(u32 cycle,u32 PulseNum)
{
TIM2_Config(cycle);
TIM_Cmd(TIM2, ENABLE);
TIM3_Config(PulseNum);
TIM_Cmd(TIM3, ENABLE);
}主函数:
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //初始化延时函数
uart_init(115200);//初始化串口波特率为115200
//LED_Init();
Pulse_output(2000-1,40-1);
while(1);
}TIM2产生周期为1S,占空比为50%的PWM波。
TIM3产生周期为0.1S,占空比为50%的PWM波。
理论是1S内TIM3产生5次PWM脉冲,示波器采集到的现象也是。
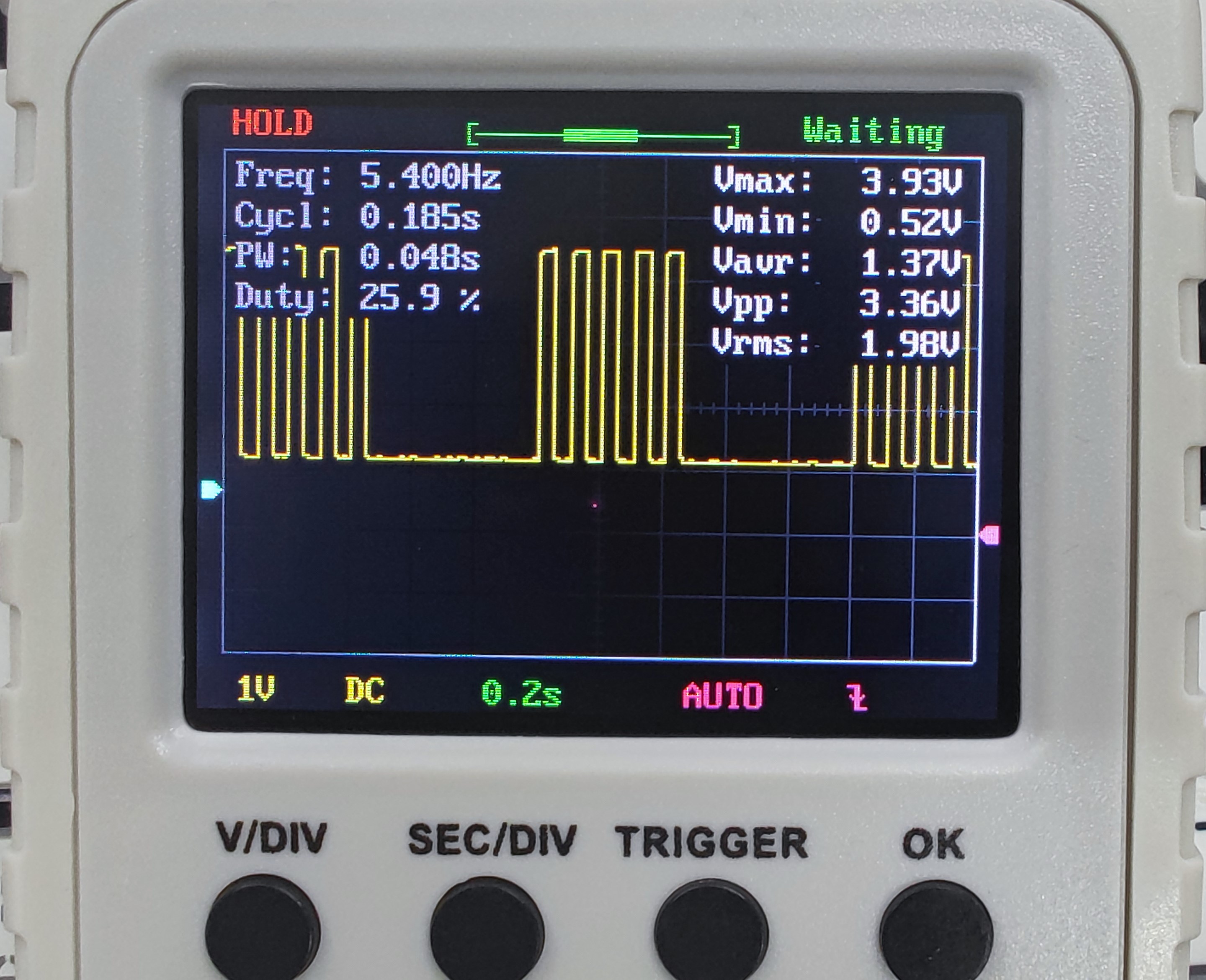
拓展:根据此可行的理论,可通过TIM2的定时器中断来控制每次操作只输出想要的脉冲数,由于手上的示波器过于简单,因此实际实现会等后面专业示波器到手了再次实现。
最后
以上就是俊逸睫毛最近收集整理的关于STM32F4的PWM脉冲数量精确输出的全部内容,更多相关STM32F4内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复