| ???? Powerd By HeartFireY | ????建议学习的前置知识:启发式搜索 | ⛓关联的算法:BFS |
一、简介
A*搜索(A* Search Algorithm),是一种在图形平面上,对于有多个节点的路径求出最低通过成本的算法。它属于图的遍历和最佳有限搜索算法,同时也是BFS算法的改进之一。
定义起点 s s s,终点 t t t,从起点(初始状态)开始的距离函数 g ( x ) g(x) g(x),到终点(最终状态)的距离函数 h ( x ) h(x) h(x), h ∗ ( x ) h^*(x) h∗(x),以及每个点的估价函数 f ( x ) = g ( x ) + h ( x ) f(x) = g(x) + h(x) f(x)=g(x)+h(x)。
A*算法每次从优先队列中取出一个 f f f最小的元素,然后更新相邻的状态。
如果 h ≤ h ∗ h leq h^* h≤h∗,则A*算法能找到最优解。
上述条件下,如果 h h h满足三角形不等式,则A*算法不会将重复节点加入队列。
当 h = 0 h = 0 h=0时,A*算法变为DFS;当 h = 0 h = 0 h=0并且边权为 1 1 1的时候变为BFS。
二、A*算法
A*算法找到的一条由图中节点以及边组成的路径。一般而言,A*算法基于BFS,同时也可以认为是对BFS搜索算法的优化。与之相对的IDA*则是基于DFS算法,对DFS算法的优化。
下面我们来分析A*算法的具体执行过程:
1.搜索区域(The Search Area)
我们以二维平面坐标系下的简单搜索为例进行分析。
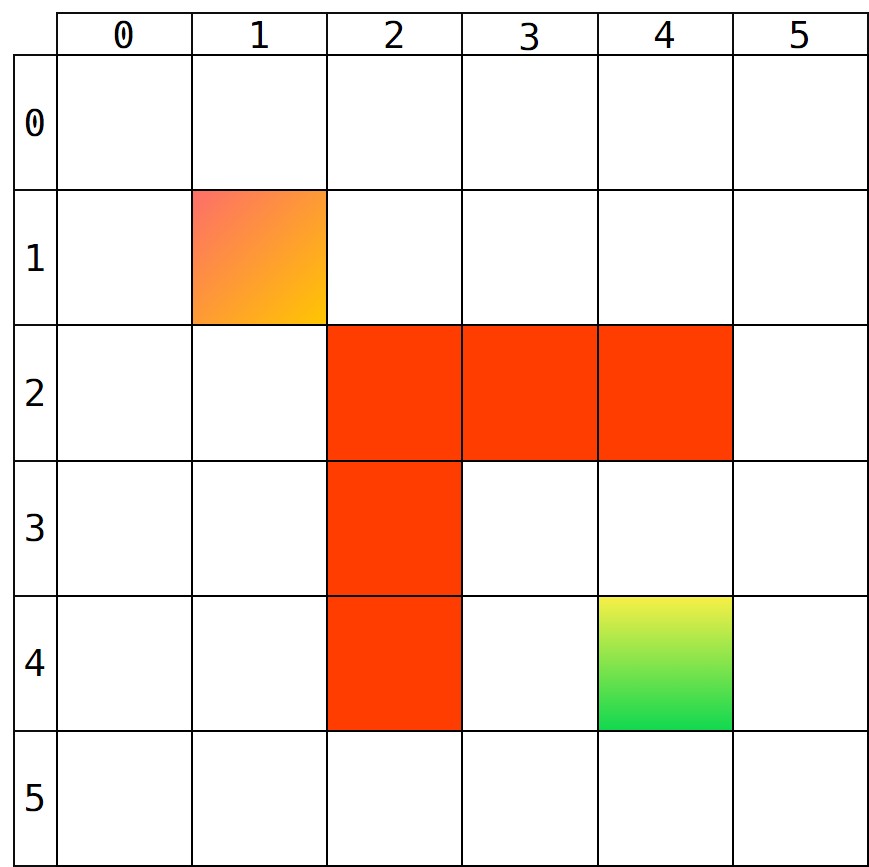
如图所示,两个渐变色点可以代表起点和终点,纯色方框代表不可经过的点,那么显然对于图中的区域被划分为了两种类型:
- 可经过(Walkable):包括正常路径、起点和终点,均属于可以经过的点
- 不可经过(Unwalkable):墙/禁止经过的点
在实际应用中,我们会遇到各种各样的图,可能有大量的图并能通过单纯的二维坐标系对点与点之间的关系(即边)进行描述。但无需担心:我们对于A*算法的表述是基于点进行的,如果换成其他边关的图也可以轻松的套用。
2.搜索起点(Search Starting)
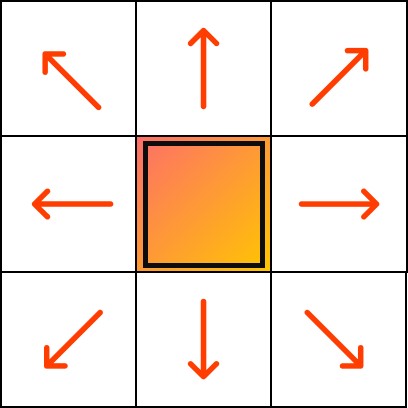
经过对搜索区域的确定与划分,我们可以得到一组量化的结点。那么我们可以开始寻找最短路径。与普通搜索类似,A*算法以起点开始向四周检索相邻方格并进行扩展,直到扩展扫描到终点算法结束。
我们这样开始我们的寻路旅途:
- 从起点 A 开始,并把它就加入到一个由方格组成的 o p e n _ l i s t open_list open_list( 开放列表 ) 中。当然现在 o p e n _ l i s t open_list open_list 里只有一项,它就是起点 A ,后面会慢慢加入更多的项。 o p e n _ l i s t open_list open_list 里的格子是路径可能会是沿途经过的,也有可能不经过。基本上 o p e n _ l i s t open_list open_list 是一个待检查的方格列表。
- 查看与起点 A 相邻的方格 ( 忽略其中不可经过的方格 ) ,把其中可走的 ( w a l k a b l e walkable walkable) 或可到达的 ( r e a c h a b l e reachable reachable) 方格也加入到 o p e n l i s t open list openlist 中。把起点 A 设置为这些方格的父亲 ( p a r e n t _ n o d e parent_node parent_node 或 p a r e n t _ s q u a r e parent_square parent_square) 。当我们在追踪路径时,这些父节点的内容是很重要的。稍后解释。
- 把 A 从 o p e n _ l i s t open_list open_list 中移除,加入到 c l o s e _ l i s t close_list close_list( 封闭列表 ) 中, c l o s e l i s t close list closelist 中的每个方格都是现在不需要再关注的。
那么下一步,我么你需要从 o p e n l i s t open_list openlist中选一个与起点A相邻的方格,按下面描述的一样重复之前的步骤。但如果只是这样,那么这与普通的搜索没有区别了。所以正是对于路径的选择成为了A*不同于一般搜索的点,我们需要对邻接的点进行排序后选择合适的点。这里我们引入一个值 F F F,这个值是确定组成路径方格的重点。
3.路径排序(Path Sorting)
我们提到了值 F F F,那么这个值是如何得来的呢?
我们首先引入值 G G G和 H H H:
-
G G G:从起点 A A A按照生成的路径移动到指定方格的移动代价。对于 G G G的值,我们有两种计算方式,对应平面上的两种距离计算方式:
①.欧拉距离: ( x 1 − x 2 ) 2 + ( y 1 − y 2 ) 2 (x_1 - x_2)^2 + (y_1 - y_2)^2 (x1−x2)2+(y1−y2)2
②.曼哈顿距离: ∣ x 1 − x 2 ∣ + ∣ y 1 − y 2 ∣ |x_1 - x_2| + |y_1 - y_2| ∣x1−x2∣+∣y1−y2∣
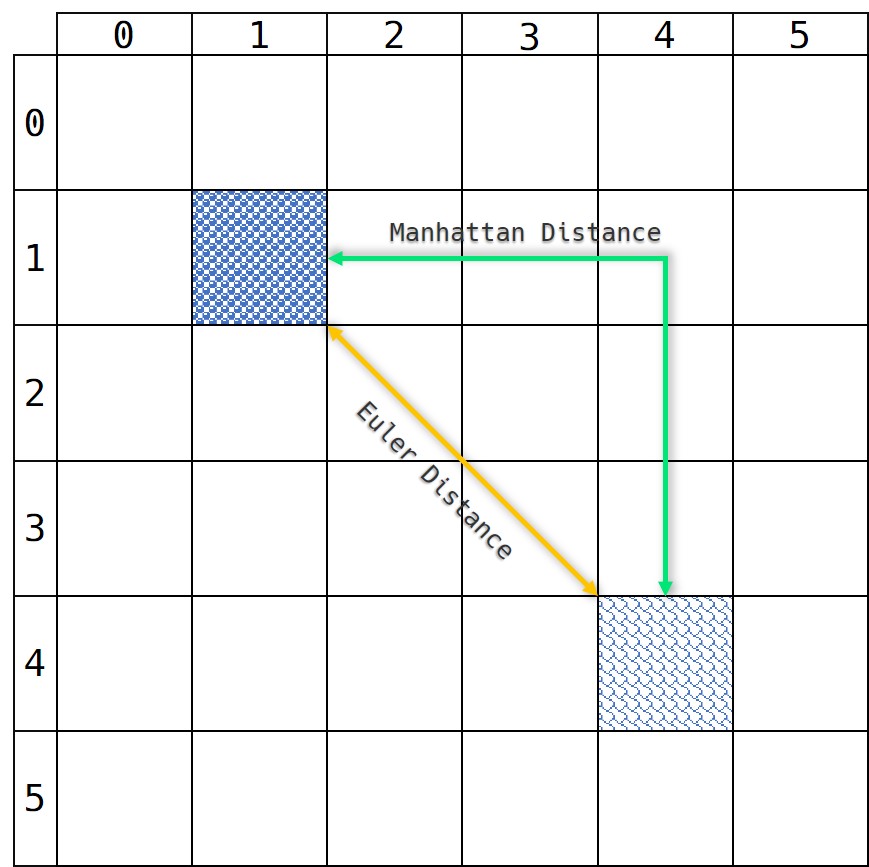
由此我们可以得知,从一个方格向相邻的方格做纵向/横向移动时, G G G取 1 1 1,当斜方向进行移动时, G G G取 2 sqrt{2} 2,那么在实际过程中,为了保证计算的简便性,我们将非整数取近似值并扩大 10 10 10倍,即规定横纵向移动时代价为 10 10 10,斜方向移动时消耗的代价为 14 14 14.
在对当前坐标进行计算时,找到当前坐标的父坐标然后判断移动方向,然后更新 F F F的值即可。 -
H H H:从指定方格移动到终点 B B B的估算成本。对于该值的计算方法有许多种。
我们主要使用 M a n h a t t a n Manhattan Manhattan 方法,也就是所谓的试探法。在试探法中,我们忽略掉路径中的障碍物,计算从当前方格横向或纵向移动到达目标所经过的方格数,忽略对角移动(直接计算当前点与目标点的曼哈顿距离),然后把总数乘以 10 。
需要注意的是, H H H值计算的是当前点到最终点的代价,而不是从父方格转移的代价,这是区别于 G G G值的一点
那么可以根据
G
G
G和
H
H
H计算
F
F
F:
F
=
G
+
H
F = G + H
F=G+H
4.寻路步骤总结
-
从起点 S S S开始,把 S S S作为一个等待检查的方格,将其放入 o p e n _ l i s t open_list open_list中。( o p e n _ l i s t open_list open_list存放等待检查的方格的列表);
-
寻找起点 S S S周围可以到达的方格(最多八个),并将它们加入 o p e n _ l i s t open_list open_list,同时设置他们的父方格为 S S S;
-
从 o p e n _ l i s t open_list open_list中删除起点 S S S,同时将 S S S加入 c l o s e _ l i s t close_list close_list( c l o s e _ l i s t close_list close_list用于存放不需要再进行检查的方格);
-
计算每个周围方格的 F F F值( F = G + H F = G + H F=G+H);
-
从 o p e n _ l i s t open_list open_list中选取 F F F值最小的方格 a a a,并将其重 o p e n _ l i s t open_list open_list中删除,放入 c l o s e _ l i s t close_list close_list中;
-
继续检查 a a a的临接方格:
a). 忽略不可经过的方格以及被标记在 c l o s e _ l i s t close_list close_list中的方格,将剩余的方格加入 o p e n _ l i s t open_list open_list,并计算这些方格的 F F F值,同时设置父方格为 a a a;
b). 如果某邻接的方格 c c c已经在 o p e n _ l i s t open_list open_list中,则需计算新的路径从 S S S到 c c c的 G G G值,判断是否需要更新:
·如果新的 G G G值更小一些,则修改父方格为方格 a a a,重新计算 F F F值。注意: H H H值不需要改变,因为方格到达终点的预计消耗是固定的,不需要重复计算。
·如果新的 G G G值更大一些,那么说明新路径不是一条更优的路径,则不需要更新值。 -
继续从 o p e n _ l i s t open_list open_list中找出 F F F值最小的,跳跃至第5步继续循环执行。
-
当 o p e n _ l i s t open_list open_list出现终点 E E E时,代表路径已经被找到,搜索成功
如果 o p e n _ l i s t open_list open_list为空,那么说明没有找到合适的路径,搜索失败
5.A*寻路算法分析
D i j k s t r a Dijkstra Dijkstra算法和A*都是最短路径问题的常用算法,下面就对这两种算法的特点进行一下比较。
-
D i j k s t r a Dijkstra Dijkstra算法计算源点到其他所有点的最短路径长度,A*关注点到点的最短路径(包括具体路径)。
-
D i j k s t r a Dijkstra Dijkstra算法建立在较为抽象的图论层面,A*算法可以更轻松地用在诸如游戏地图寻路中。
-
D i j k s t r a Dijkstra Dijkstra算法的实质是广度优先搜索,是一种发散式的搜索,所以空间复杂度和时间复杂度都比较高。
对路径上的当前点,A*算法不但记录其到源点的代价,还计算当前点到目标点的期望代价,是一种启发式算法,也可以认为是一种深度优先的算法。
-
由第一点,当目标点很多时,A*算法会带入大量重复数据和复杂的估价函数,所以如果不要求获得具体路径而只比较路径长度时, D i j k s t r a Dijkstra Dijkstra算法会成为更好的选择。
三、A*算法的应用
Sample.1 HDU-1043 Eight
Problem Description
The 15-puzzle has been around for over 100 years; even if you don’t know it by that name, you’ve seen it. It is constructed with 15 sliding tiles, each with a number from 1 to 15 on it, and all packed into a 4 by 4 frame with one tile missing. Let’s call the missing tile ‘x’; the object of the puzzle is to arrange the tiles so that they are ordered as:
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 x
where the only legal operation is to exchange ‘x’ with one of the tiles with which it shares an edge. As an example, the following sequence of moves solves a slightly scrambled puzzle:
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
5 6 7 8 5 6 7 8 5 6 7 8 5 6 7 8
9 x 10 12 9 10 x 12 9 10 11 12 9 10 11 12
13 14 11 15 13 14 11 15 13 14 x 15 13 14 15 x
r-> d-> r->
The letters in the previous row indicate which neighbor of the ‘x’ tile is swapped with the ‘x’ tile at each step; legal values are ‘r’,‘l’,‘u’ and ‘d’, for right, left, up, and down, respectively.
Not all puzzles can be solved; in 1870, a man named Sam Loyd was famous for distributing an unsolvable version of the puzzle, and
frustrating many people. In fact, all you have to do to make a regular puzzle into an unsolvable one is to swap two tiles (not counting the missing ‘x’ tile, of course).
In this problem, you will write a program for solving the less well-known 8-puzzle, composed of tiles on a three by three arrangement.
Input
You will receive, several descriptions of configuration of the 8 puzzle. One description is just a list of the tiles in their initial positions, with the rows listed from top to bottom, and the tiles listed from left to right within a row, where the tiles are represented by numbers 1 to 8, plus ‘x’. For example, this puzzle
1 2 3
x 4 6
7 5 8
is described by this list:
1 2 3 x 4 6 7 5 8
Output
You will print to standard output either the word ``unsolvable’’, if the puzzle has no solution, or a string consisting entirely of the letters ‘r’, ‘l’, ‘u’ and ‘d’ that describes a series of moves that produce a solution. The string should include no spaces and start at the beginning of the line. Do not print a blank line between cases.
Analysis
首先分析题目大意:在 3 × 3 3times 3 3×3 的棋盘上,摆有八个棋子,每个棋子上标有 1 1 1 至 8 8 8 的某一数字。棋盘中留有一个空格,空格用 X X X 来表示。空格周围的棋子可以移到空格中,这样原来的位置就会变成空格。给出一种初始布局和目标布局,找到一种从初始布局到目标布局最少步骤的移动方法。
此处的 H H H可以认为是“不应该位于当前方格的数的个数”。那么很容易写出A*算法解决这道题。
我们首先来做这道题的简化版:洛谷[P1379] 八数码难题
题目链接:P1379 八数码难题 - 洛谷
我们首先构造本题目的数据结构(BFS队列中储存的数据结构),一个矩阵储存状态,一个整数变量储存步数。
对于本题目,显然 H H H函数要求的是不应该位于当前方格的数字的个数,那么我们可以根据这个目的编写一个 H H H函数;
然后我们从头开始匹配矩阵,每次对一个点的周围的点进行判断、交换和入队,这里采用优先队列并重载比较运算符,定义优先级为 s t e p + h ( x ) step + h(x) step+h(x)大的优先。
#include <bits/stdc++.h>
using namespace std;
const int dx[] = {1, -1, 0, 0};
const int dy[] = {0, 0, 1, -1};
int fx = 0, fy = 0;
struct matrix{
int a[5][5];
bool operator<(matrix x) const{
for(int i = 1; i <= 3; i++)
for(int j = 1; j <= 3; j++)
if(a[i][j] != x.a[i][j]) return a[i][j] < x.a[i][j];
return false;
}
}f, st;
inline int h(matrix a){
int ans = 0;
for(register int i = 1; i <= 3; i++)
for(register int j = 1; j <= 3; j++)
if(a.a[i][j] != st.a[i][j]) ans++;
return ans;
}
struct node{
matrix a;
int t;
bool operator<(node x) const { return t + h(a) > x.t + h(x. a); }
}x;
inline void init(){
st.a[1][1] = 1, st.a[1][2] = 2, st.a[1][3] = 3;
st.a[2][1] = 8, st.a[2][2] = 0, st.a[2][3] = 4;
st.a[3][1] = 7, st.a[3][2] = 6, st.a[3][3] = 5;
}
priority_queue<node> q;
set<matrix> s;
signed main(){
init();
for(register int i = 1; i <= 3; i++){
for(register int j = 1; j <= 3; j++){
char tmp; scanf("%c", &tmp);
f.a[i][j] = tmp - '0';
}
}
q.push({f, 0});
while(!q.empty()){
x = q.top(); q.pop();
if(!h(x.a)) return printf("%dn", x.t), 0;
for(int i = 1; i <= 3; i++)
for(int j = 1; j <= 3; j++)
if(!x.a.a[i][j]) fx = i, fy = j;
for(int i = 0; i < 4; i++){
int nx = fx + dx[i], ny = fy + dy[i];
if(nx > 0 && nx <= 3 && ny > 0 && ny <= 3){
swap(x.a.a[fx][fy], x.a.a[nx][ny]);
if(!s.count(x.a)) s.insert(x.a), q.push({x.a, x.t + 1});
swap(x.a.a[fx][fy], x.a.a[nx][ny]);
}
}
}
return 0;
}
有了简化版的理解,这道题目就没有那么难了,可以继续根据以上思路类比写出代码。
#include<iostream>
#include<vector>
#include<queue>
#include<string>
#include<unordered_map>
#define _for(i, a, b) for (int i = (a); i < (b); ++i)
#define _rep(i, a, b) for (int i = (a); i <= (b); ++i)
#define FOR(i, a, b) for (int i = (a); i >= (b); --i)
using namespace std;
typedef long long ll;
typedef pair<int, int> pii;
typedef vector<int> IntVec;
const int N = 1000 + 10;
string s(9, 0), END = "12345678x";
unordered_map<string, string> vis;
int dx[] = { -1, 1, 0, 0}, dy[] = {0, 0 ,-1, 1 };
char dir[] = { "durl" };
void bfs(){
queue<string> q;
q.push(END);
while(!q.empty()){
string t = q.front();
q.pop();
int u = t.find('x');
int x = u / 3, y = u % 3;
string dist = vis[t];
_for (i, 0, 4){
int a = x + dx[i], b = y + dy[i];
if (0 <= a && a < 3 && 0 <= b && b < 3){
swap(t[u], t[a * 3 + b]);
if (!vis.count(t)){
vis[t] = dist + dir[i];
q.push(t);
}
swap(t[u], t[a * 3 + b]);
}
}
}
}
int main(){
#ifdef LOCAL
freopen("data.in", "r", stdin);
#endif
ios::sync_with_stdio(false), cin.tie(0), cin.tie(0);
bfs();
while(cin>> s[0]){
_for(i, 1, 9) cin >> s[i];
if (vis.count(s)){
string ans = vis[s];
reverse(ans.begin(), ans.end());
cout << ans << endl;
}
else puts("unsolvable");
}
return 0;
}
最后
以上就是贪玩蜡烛最近收集整理的关于A*算法 详解与例题的全部内容,更多相关A*算法内容请搜索靠谱客的其他文章。








发表评论 取消回复