目录
5.4 状态空间模型
5.4.1 概述
5.4.2状态空间模型函数
5.4.3 模型建立(MATLAB)
5.4 状态空间模型
5.4.1 概述
- 状态是系统动态信息的集合;
- 状态变量:在表征系统信息的所有变量中,能够全部描述系统运行/时域行为的最小数目的一组独立变量,其选取不唯一,状态变量个数=系统含有独立储能元件的个数=系统的阶数,一般取储能元件的状态量作为状态变量,状态初值与储能元件的初始状态相对应;
- 状态空间:由系统的n个状态变量x1(t), x2(t), …, xn(t)为坐标轴,构成的n维欧氏空间,称为n维状态空间;
- 状态矢量:引入状态空间后,可把n个状态变量用矢量形式表示出来,即状态空间是由所有状态矢量x组成的,系统的一个状态在状态空间中就是一个点;
- 状态轨线:系统状态矢量的端点在状态空间中所移动的路径,代表了状态随时间变化的规律;
- 状态方程:由系统状态变量构建的一阶微分方程组,能响应所有独立变量和初始条件;
- 状态空间模型:即系统运动轨迹;
5.4.2状态空间模型函数
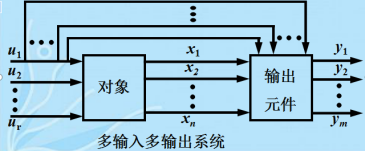
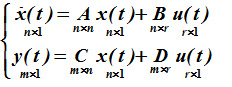
对于一般的n阶线性定常系统(n个状态,r个输入,m个输出)
控制过程:
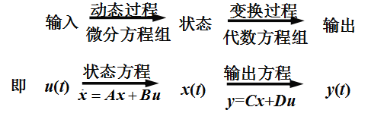
即随便一个模型你要想办法把所有已知条件组合创建一阶微分方程组,分为输入量u、状态量x、输出量y,写成标准格式,具体解释看下表。
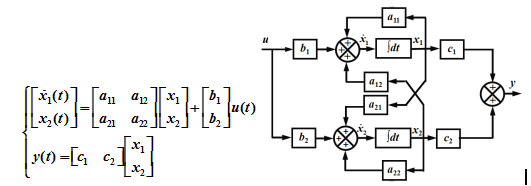
结构图:
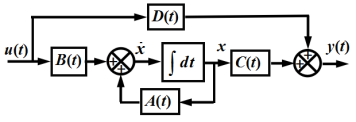
下图是一个模型的结构图例子,生动形象啊。
| 系统分类 | 系统状态空间模型 | |
| 线性定常系统 |
| 一阶微分方程组 代数方程 |
| 系统的完整描述必须具有两部分内容,前者刻画出系统运动的内部(状态x)过程,后者则表达系统内部(状态x)运动与外部(输出y)的联系 | ||
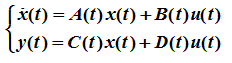
| 线性时变系统 |
| |
| 区别:矩阵是时间t的函数(变系数微分方程) | ||
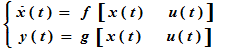
| 非线性定常系统 |
参考非线性定义理解与线性定常系统区别 | |
| 非线性时变系统 |
| |
5.4.3 模型建立(MATLAB)
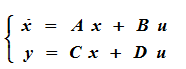
| 线性定常系统一般表达式 |
|
|
|
ss/ssdata | sys=ss(A,B,C,D);%建立连续系统状态空间模型 sys=ss(G,H,C,D,Ts);%建立采样周期Ts离散系统状态空间模型 [A,B,C,D ] =ssdata(sys);%sys是建立的状态空间模型,[A, B, C, D]为系统状态空间的矩阵 | |
| [A,B,C,D]=tf2ss(num,den);%将传递函数转化为状态方程 sys=ss(A,B,C,D); | ||
最后
以上就是高兴八宝粥最近收集整理的关于MATLAB/simulink控制系统之状态空间模型(0基础)的全部内容,更多相关MATLAB/simulink控制系统之状态空间模型(0基础)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复