实验一Simulink仿真基础
目录
实验一Simulink仿真基础
一、实验目的
二、实验内容
2.1MATLAB中常用的绘图函数
2.2Simulink仿真基础
三、练习
一、实验目的
- 复习巩固MATLAB中常用的绘图函数;
- 掌握Simulink仿真环境;
- 熟悉Simulink模块库;
- 掌握Simulink基本操作、系统建模以及仿真运行。
二、实验内容
2.1MATLAB中常用的绘图函数
2.1.1二维图形绘制
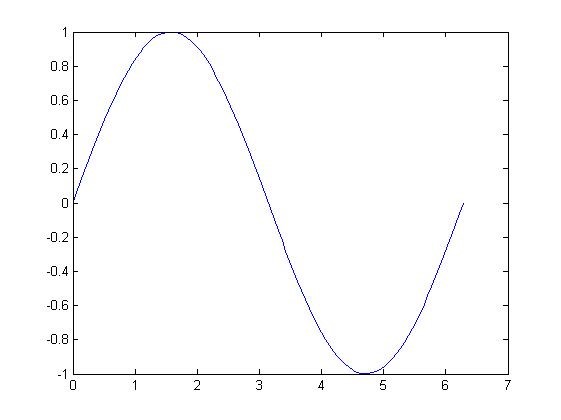
l、plot(x,y)是绘制一维曲线的基本函数,但在使用此函数之前,需先定义曲线上每一点的座标。例1用MATLAB画出y=sin(x)的图形。
x=linspace(0,2*pi,100); %100个点的x座标
y=sin(x); %对应的y座标
plot(x,y);
执行后得到的曲线,如图1-1所示
若要画出多条曲线,只需将座标对依次放入plot函数即可。
plot(x,sin(x),x,cos(x));
若要改变颜色,在座标对后面加上相关字串即可。
plot(x,sin(x),'c',x,cos(x),'g');
若要同时改变颜色及图线型态,也是在座标后面加上相关字串即可。
plot(x,sin(x),'co',x,cos(x),'g*');
对图形加上各种注解与处理:
xlabelflnputValue');%x轴注解;
ylabel('FunctionValue');%y轴注解;
title('TwoTrigonometricFunctions');%图形标题;
legend('y=sin(x)','y=cos(x)');%图形注解;
gridon;%显示格线;
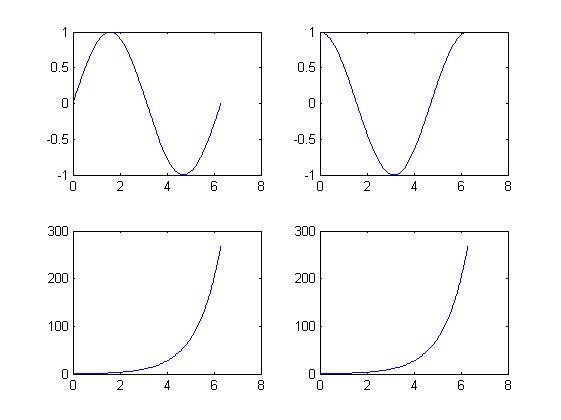
subplot来同时画出数个小图形放同一个视窗之中
例2用MATLAB绘制y=sinx,y=cosx,y=sinhx,y=coshx的图形,并放在同一个窗口中。»x=linspace(0,2*pi,100);
»subplot(2,2,1),plot(x,sin(x))
»subplot(2,2,2),plot(x,cos(x))
»subplot(2,2,3),plot(x,sinh(x))
>>subplot(2,2,4),plot(x,cosh(x))执行后得到的曲线,如图1-2所示。
2.1.2三维图形绘制
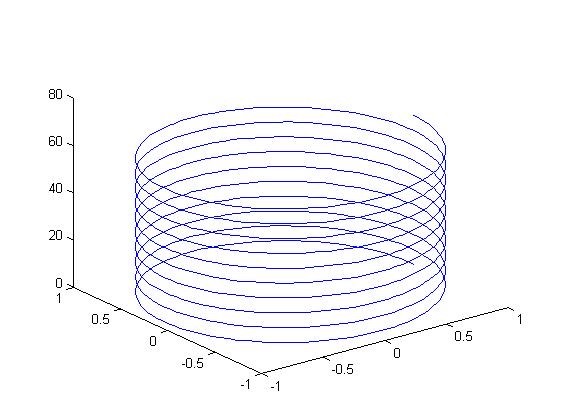
plot3(x,y,z)函数可绘制三维图形,与plot(x,y)用法类似。
例如,输入
»t=linspace(0,20*pi,500);
»plot3(sin(t),cos(t),t)
执行后可得到简单的三维曲线,如图1-3所示。
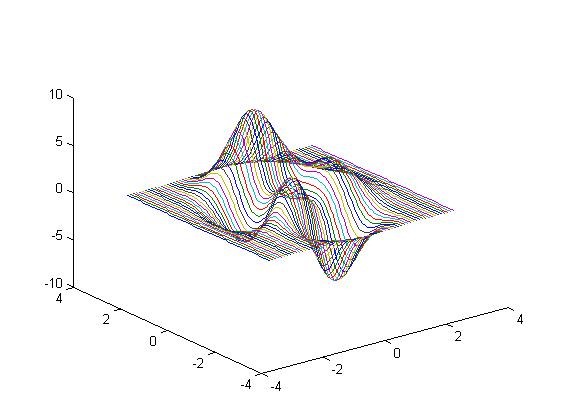
又如对于多峰函数,可在三维空间中画出三维曲线,程序为[x,y]=meshgrid(-3:0.1:3);%产生x,y的数据矩阵
»z=peaks(x,y);
»figure(l)»plot3(x,y,z)
则执行后得到的三维曲线如图1-4所示。
mesh和surf是三度空间立体绘图的基本命令,mesh可画出立体网状图,surf则可画出立体曲面图,两者产生的图形都会依高度而有不同颜色。
画岀由函数
形成的立体网状图。
>>x=linspace(-2,2,25);%在x轴上取25点
>>y=linspace(-2,2,25);%在y轴上取25点
[xx,yy]=meshgrid(x,y);%产生xx和yy的矩阵
zz=xx.*exp(-xx.A2-yy.A2);%计算函数值
mesh(xx,yy,zz);%画出立体网状图
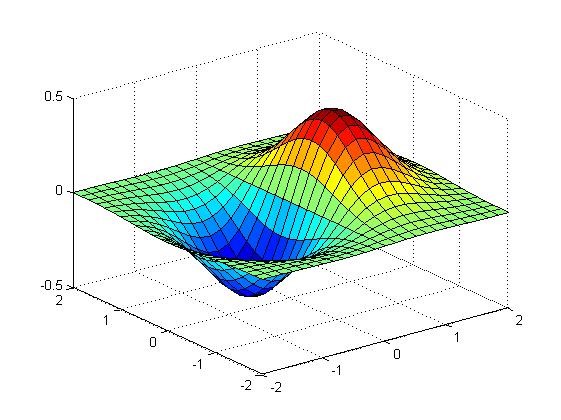
图1-5三度空间立体绘图
surf和mesh有相同的用法,surf(xx,yy,zz)可画出立体曲面图。
2.2Simulink仿真基础
2.2.1熟悉Simulink仿真环境
Simulink是完成MATLAB机器人仿真一个关键扩展产品。其仿真环境包括Simulink模块库和
Simulink仿真平台。
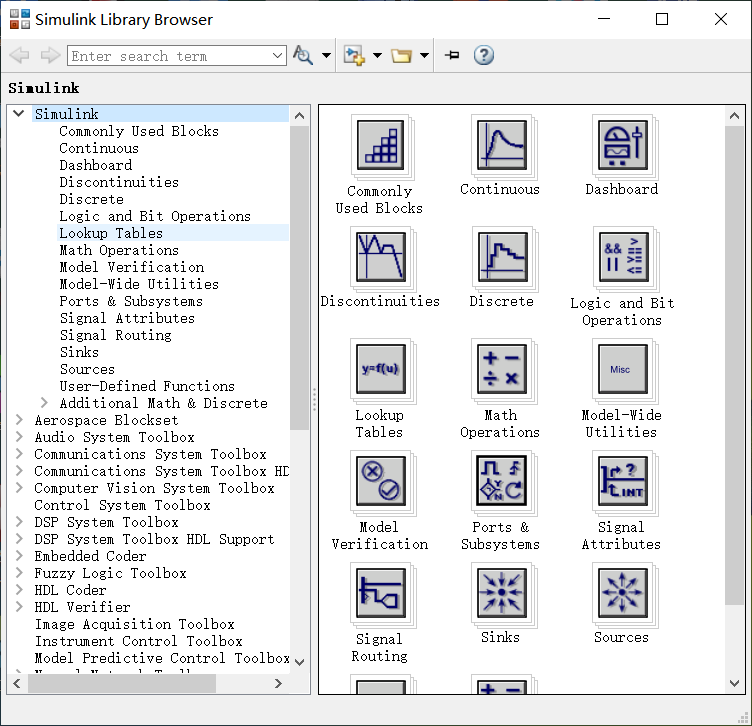
在MATLAB命令窗口输入Simulink,按回车键,启动Simulink模块库浏览器,如图1-6所示。
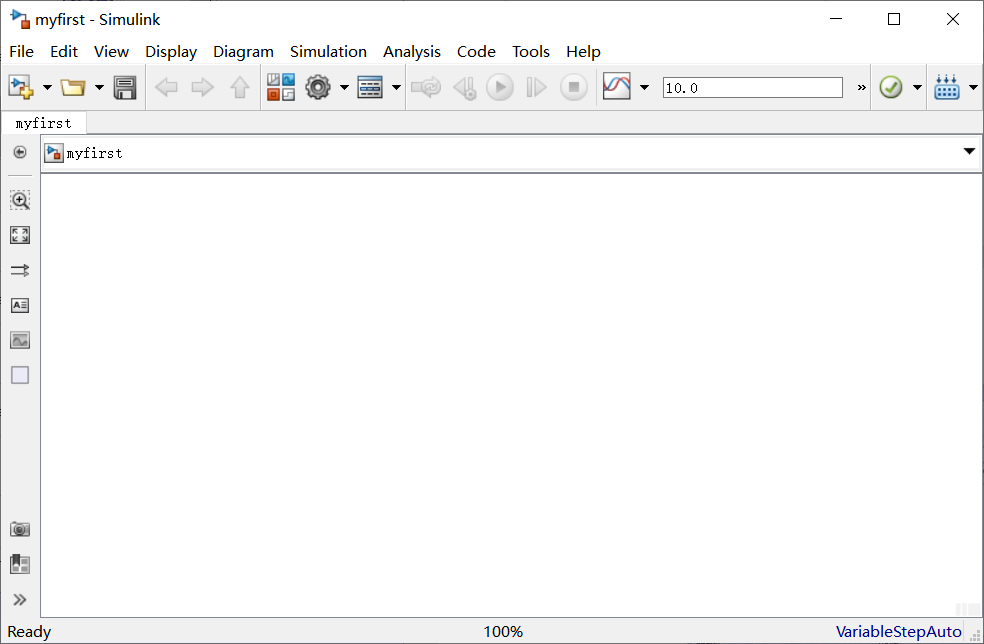
单击Simulink模块库浏览器窗口工具栏的NewModel按钮冬,进入Simulink仿真平台界面,如图1-7所示。仿真平台标题栏上的untitled表示一个尚未命名的新模型文件。
- Simulink模块操作
添加和删除模块
用鼠标之间拖动图1-6中所需模块到图1-7中即可添加模块,如需删除某个模块,就直接选中后按delete键即可删除。
模块移动
拖动鼠标即可实现移动模块,若要同时移动多个模块则要利用框选或按住shift键多选。
模块旋转
右键点击模块,选择Rotate&flip,下一级菜单中会有Clockwise、CounterClockwise、FlipBlock,FlipBlockName四个选项。
参数设置
双击需要修改参数的模块,就会弹出参数调节对话框,来修改参数。
模块连线
选中模块1后按住Ctrl键,然后点击模块2即可自动连接两个模块。
引出支线
当需要在模块1和模块2间的连线中引岀一条支线到模块3时,可以按住鼠标右键从模块1和2间的某个位置拖拽出一条线到模块3。
- Simulink仿真实例
给图1-8所示的RLC电路系统建立模型。
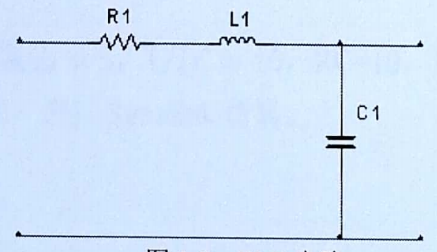
在这个系统中,有用的数据除了电阻值R、电感值L和电容值C,还有就是输入电压久和输出电压兀这两个变量。
该系统模型为![]() (1-1)
(1-1)
用Simulink建立仿真模型,对公式(1.1)整理得到:![]() (1-2)
(1-2)
然后启动MATLAB,新建Simulink模型文件,建立图1-9所示的仿真模型。
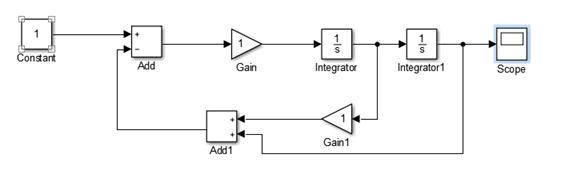
上述模型建立之后,双击Constant模块和两个Gain模块,打开参数调节对话框,对公式(区)
中的参数赋值如下:Ur=1,1/LC=1,RC=1,得到图1-10所示仿真模型图形。
三、练习
3.1熟悉MATLAB的各种图形绘制命令,除了实验指导书提供的命令外,再找3种涉及机电系统仿真、控制理论的绘图命令。
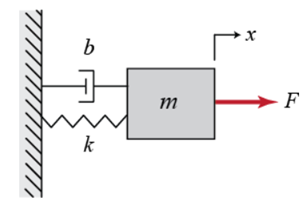
仿真1—质量弹簧阻尼系统
质量弹簧阻尼系统如图所示,弹簧弹力与质量块位移x成正比,粘性阻力与质量块速度成正比,弹簧弹力与粘性阻力均与弹簧运动方向相反,x=0是质量块初始位置,此时瘫痪弹力为0,质量块静止。
其受力分析如图所示
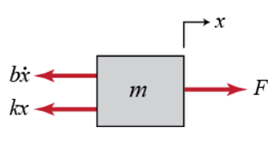
其控制方程式为
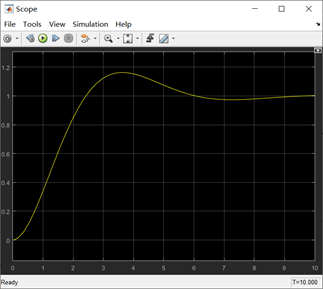
设质量块质量为1kg,弹簧弹性系数为1N/s,阻尼系数b=0.2Ns/m,拉力F=1N,则系统传递函数为
3.2对公式(1-2)中参数,取S=5,1/LC=10,RC=10,重新赋值,进行Simulink仿真。
3.3对自己感兴趣的控制系统,进行Simulink仿真
最后
以上就是热心学姐最近收集整理的关于机器人技术之Simulink仿真基础实验一Simulink仿真基础 的全部内容,更多相关机器人技术之Simulink仿真基础实验一Simulink仿真基础 内容请搜索靠谱客的其他文章。








发表评论 取消回复