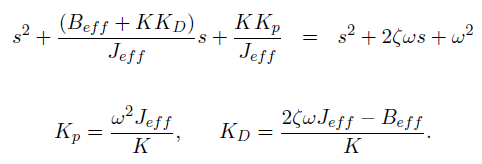
上节所讲到的闭环系统的PD控制器是二阶的,因此阶跃响应由自然频率和阻尼比来确定。如果给定自然频率和阻尼比的值,那么控制器参数Kd和Kp就可以通过下面的式子来确定:
一般把阻尼比设置为1,这样的话响应就是临界阻尼,这就提供了最快的非震荡响应。在本书中自然频率ω决定了响应速度。
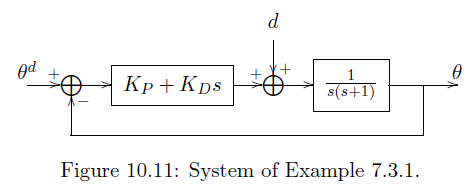
例10.1 考虑如下二阶系统
该系统的闭环特征多项式为

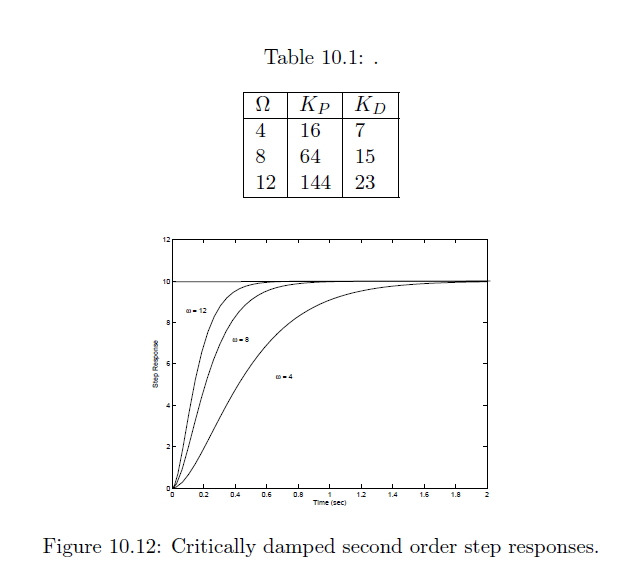
假设输入=10,且没有扰动(d=0).如果ζ=1,那么对于不同的ω系统所需要的PD控制器参数以及对应的阶跃响应如下所示
如果加上d=40的扰动,响应结果如下
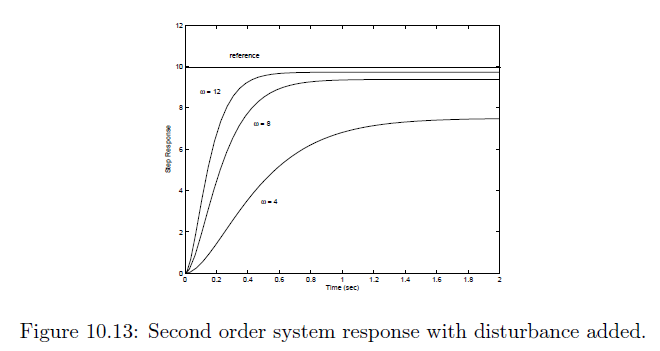
我们发现:自然频率越大,由于扰动产生的稳态误差越小
最后
以上就是朴实河马最近收集整理的关于《机器人动力学与控制》第十章——独立关节控制 10.3.2 PD 控制器的性能的全部内容,更多相关《机器人动力学与控制》第十章——独立关节控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复