文章目录
- 1. 概述
- 2. 仿真搭建
- 2.1 运动轨迹函数
- 2.2 机器人的机械仿真模型
- 2.3 机器人的电气仿真模型
- 2.3.1 直流电机部分
- 2.3.2 减速器与传动装置
- 2.4 PID 控制的仿真模型
- 2.4.1 PID 控制器的仿真模型
- 2.4.2 PID 输出量的上下限设定
- 2.5 构建整体仿真模型
- 3. 函数编写
- 3.1 initial_patam.m函数的编写
- 3.2 ch6_plot.m函数的编写
- 4. 运行仿真
- 5. 资源下载
1. 概述
使用 simulink 搭建《用MATLAB玩转机器人》的第六章——单关节机器人的仿真,详细记录并积累 simulink 的使用技巧。
2. 仿真搭建
对于单关节机器人的位置控制,大致分为四个过程:
- 规划出单杆自由端的运动轨迹函数,分为加速、匀速、减速三个区间
- 建立机器人的机械、电气模块的数学模型
- 设计控制系统的数学模型
- 根据上述过程建立的数学模型进行仿真搭建并仿真。
另外,单关节机器人位置控制的仿真总共分为四个模块另:
a. 运动轨迹函数生成模块
b. PID控制器及输出限幅模块
c. 减速器与传动装置模型
d. 单杆的运动模型
2.1 运动轨迹函数
运动轨迹函数分为三个部分
(1)加速区间 0≤t≤2Δ
(6-1)
η
加
速
(
t
)
=
π
4
Δ
2
t
3
−
π
16
Δ
3
t
4
η_{加速}(t)= frac{π}{4Δ^2}t^3-frac{π}{16Δ^3}t^4tag{6-1}
η加速(t)=4Δ2πt3−16Δ3πt4(6-1)
(2)匀速区间 2Δ≤t≤2.5-2Δ
(6-2)
η
匀
速
(
t
)
=
(
t
−
Δ
)
×
π
η_{匀速}(t)=(t-Δ)×πtag{6-2}
η匀速(t)=(t−Δ)×π(6-2)
(3)减速区间 2.5-2Δ≤t≤2.5
η
减
速
(
t
)
=
2
π
−
Δ
π
+
π
(
t
−
2
)
−
π
4
Δ
2
(
t
−
2
)
3
+
π
16
Δ
3
(
t
−
2
)
4
η_{减速}(t)= 2π-Δπ+π(t-2)-frac{π}{4Δ^2}(t-2)^3+frac{π}{16Δ^3}(t-2)^4
η减速(t)=2π−Δπ+π(t−2)−4Δ2π(t−2)3+16Δ3π(t−2)4
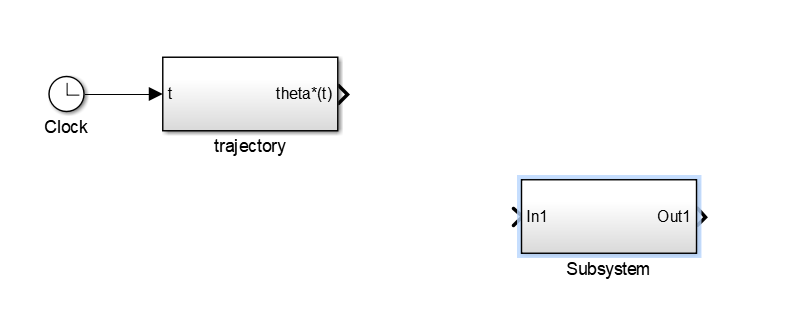
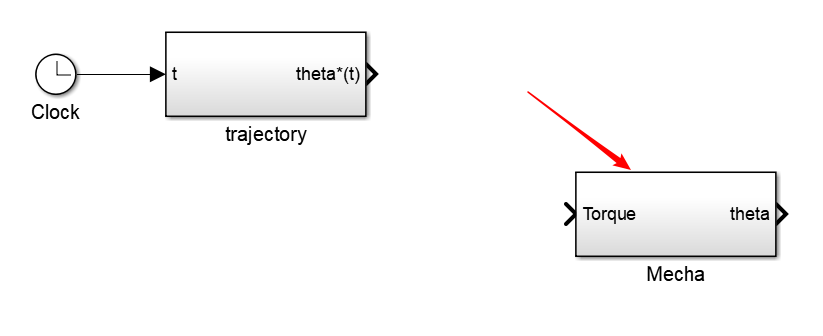
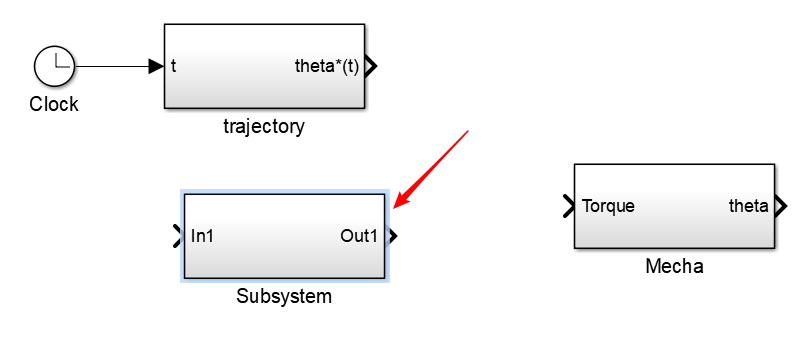
Source中拖入clock,Commonly used blocks中拖入subsystem,将两者连线后,把Subsystem改为trajectory。
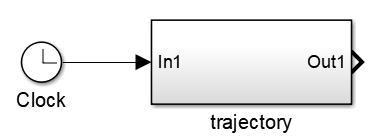
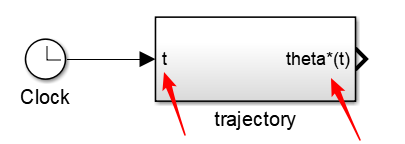
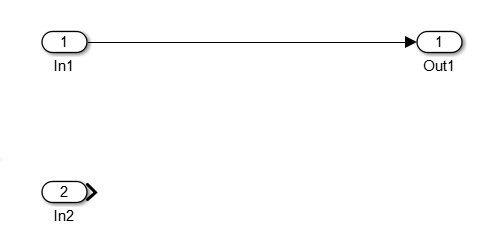
- 双击
Subsystem,将In1改为t,Out1改为theta*(t)


观察在主系统中的改变
- 绘制 0≤t≤2Δ 的时间区间
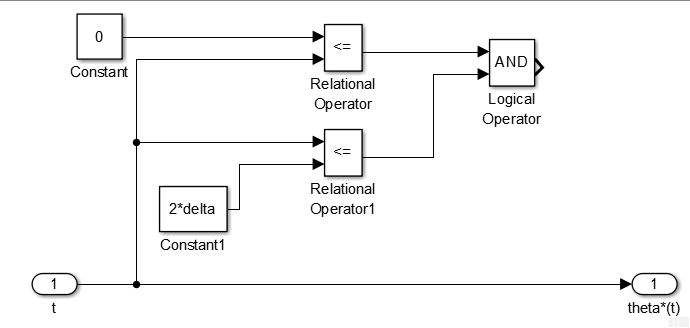
- 拖入
Enabled Subsystem,并连线
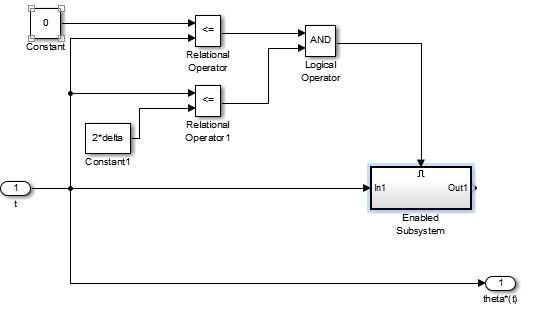
- 双击
Enabled Subsystem,进入子系统输入公式(6-1)
(1)加速区间 0≤t≤2Δ加速区间 0≤t≤2Δ
(6-1) η 加 速 ( t ) = π 4 Δ 2 t 3 − π 16 Δ 3 t 4 η_{加速}(t)= frac{π}{4Δ^2}t^3-frac{π}{16Δ^3}t^4tag{6-1} η加速(t)=4Δ2πt3−16Δ3πt4(6-1)
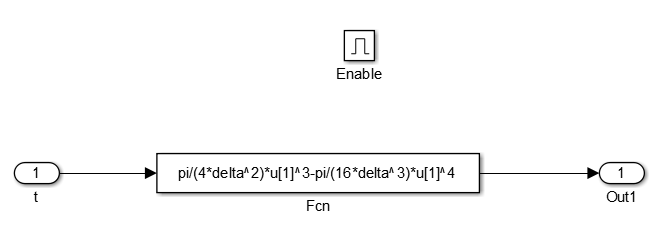
公式(6-1)中的 t 即为子系统的输入 t,也为图中 u[1].
6. 采用同样的方法,分别绘制匀速区间、减速区间,公式如下:
(2)匀速区间 2Δ≤t≤2.5-2Δ
(6-2)
η
匀
速
(
t
)
=
(
t
−
Δ
)
×
π
η_{匀速}(t)=(t-Δ)×πtag{6-2}
η匀速(t)=(t−Δ)×π(6-2)
(3)减速区间 2.5-2Δ≤t≤2.5
η
减
速
(
t
)
=
2
π
−
Δ
π
+
π
(
t
−
2
)
−
π
4
Δ
2
(
t
−
2
)
3
+
π
16
Δ
3
(
t
−
2
)
4
η_{减速}(t)= 2π-Δπ+π(t-2)-frac{π}{4Δ^2}(t-2)^3+frac{π}{16Δ^3}(t-2)^4
η减速(t)=2π−Δπ+π(t−2)−4Δ2π(t−2)3+16Δ3π(t−2)4
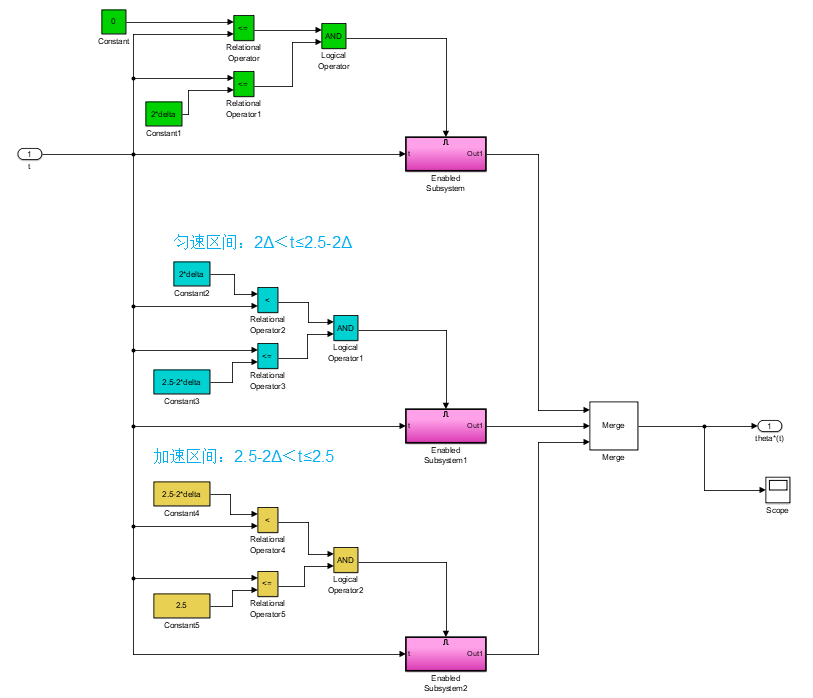
图中,示波器是为了观察轨迹函数的输出,merge 模块则参考链接simulink模块使用记录2-EnabledSubsystem/merge
2.2 机器人的机械仿真模型
单杆的数学模型为:
(6-4)
τ
=
(
m
1
r
1
2
+
I
z
z
g
1
)
×
θ
¨
1
+
c
1
θ
˙
1
τ=(m_1r_1^2+I_{zzg1})×ddotθ_1+c_1dotθ_1 tag{6-4}
τ=(m1r12+Izzg1)×θ¨1+c1θ˙1(6-4)
单杆运动时,输入时扭矩 τ、输出是转角
θ
1
θ_1
θ1、
m
1
m_1
m1、
r
1
r_1
r1、
I
z
z
g
1
I_{zzg1}
Izzg1、
c
1
c_1
c1是常量。
将公式(6-4)变形如下,按照下面的公式建立仿真模型:
(6-5)
θ
¨
1
=
1
m
1
r
1
2
+
I
z
z
g
1
(
τ
−
c
1
θ
˙
1
)
ddotθ_1=frac{1}{m_1r_1^2+I_{zzg1}}(τ-c_1dotθ_1) tag{6-5}
θ¨1=m1r12+Izzg11(τ−c1θ˙1)(6-5)
- 拖入
subsystem,双击后,将上述公式建立仿真
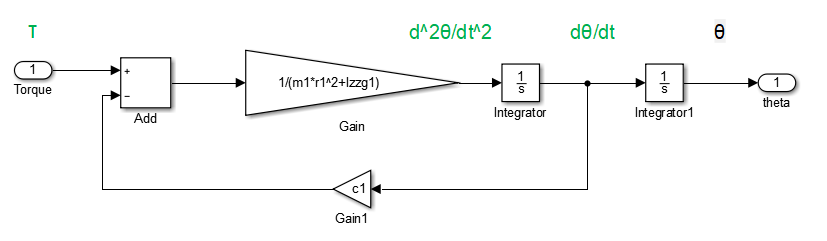
子系统内部模块建立后,将子系统命名为Mecha,如下图
2.3 机器人的电气仿真模型
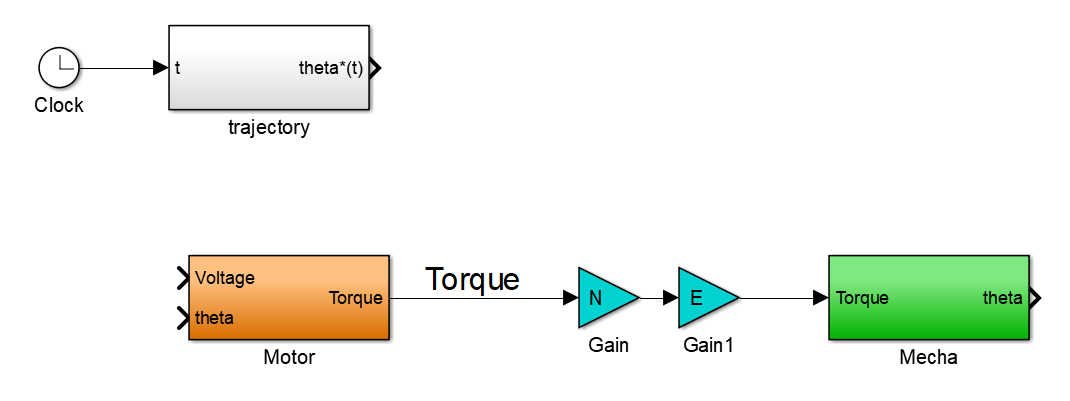
在simulink中新建ch6_sim模型文件,搭建如下系统。
2.3.1 直流电机部分
直流电机的电气结构数学模型为:
(6-6)
T
e
=
K
t
i
a
T_e=K_ti_a tag{6-6}
Te=Ktia(6-6)
(6-7)
T
e
=
T
+
(
J
θ
¨
+
B
m
θ
˙
)
T_e=T+(Jddotθ + B_mdotθ) tag{6-7}
Te=T+(Jθ¨+Bmθ˙)(6-7)
(6-8)
i
a
(
s
)
=
1
L
a
s
+
R
a
v
(
s
)
−
K
e
s
L
a
s
+
R
a
θ
(
s
)
i_a(s)= frac{1}{L_as+R_a}v(s)- frac{K_es}{L_as+R_a} θ(s) tag{6-8}
ia(s)=Las+Ra1v(s)−Las+RaKesθ(s)(6-8)
式中,
T
e
T_e
Te是电机产生的转矩(N·m);
K
t
K_t
Kt是转矩常数(N·m/A);J是转子的惯性力矩(kg·
m
2
m^2
m2);
B
m
B_m
Bm是旋转运动的粘性摩擦系数;T是将要传递到负载侧(单杆)的力矩(N·m);θ表示旋转角度;
θ
˙
dot θ
θ˙表示旋转角速度(rad/s);
θ
¨
ddot θ
θ¨表示角加速度(rad/
s
2
s^2
s2);v为输入电压(V);
i
a
i_a
ia为转子电流(A);
R
a
R_a
Ra为转子电阻(Ω);
L
a
L_a
La是转子电感(H);
K
e
K_e
Ke是逆启动转矩系数[V/(rad/s)]。
- 拖入
subsystem,双击进入
- 从
Ports&& Subsystems中拖入In1
- 将直流电机电气部分的仿真模型构建出来,即公式(6-6)、(6-7)、(6-8)
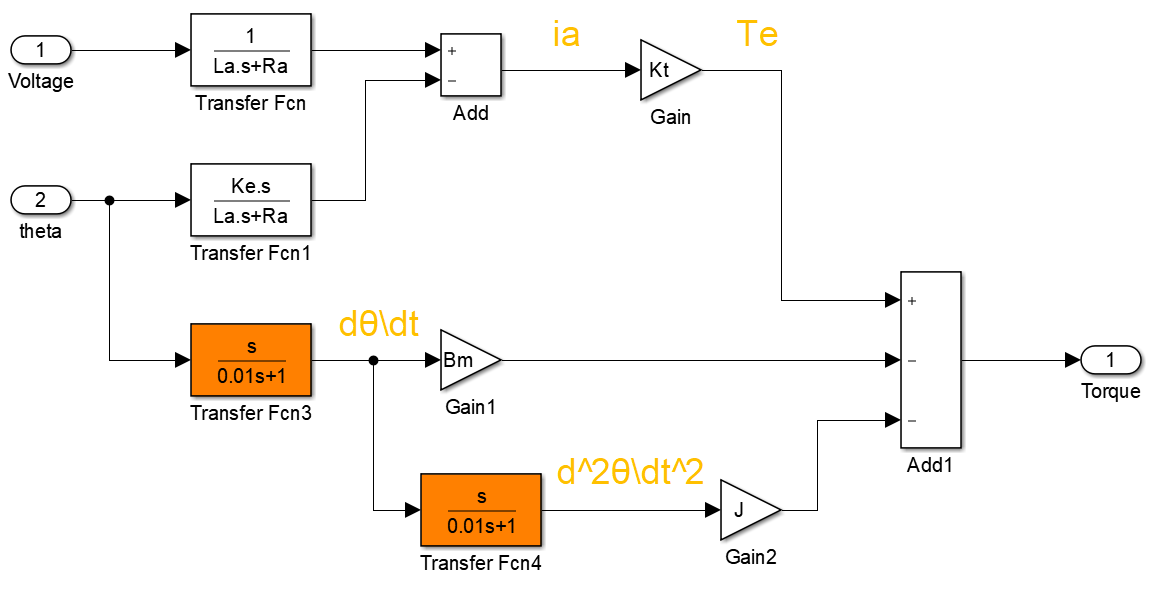
图中,输入Voltage和theta分别是公式(6-8)中的 v(s) 和 θ(s)。输出Torque是将要传到负载侧(单杆)的力矩 T,由公式(6-7)变形得到 (6-9) T = T e − ( J θ ¨ + B m θ ˙ ) T=T_e-(Jddotθ + B_mdotθ) tag{6-9} T=Te−(Jθ¨+Bmθ˙)(6-9)
另外,图中的橘黄色部分原本是春微分环节 s ,但在一般情况下,淡村的微分环节容易受到高频噪声的干扰(实际上,表现为纯粹的微分特性的器件在现实生活中是很难纯在的),故采用了近似微分 s 0.01 s + 1 frac{s}{0.01s+1} 0.01s+1s。
近似微分是给纯微分环节串联一个影响较小的低通滤波器 1 a s + 1 frac{1}{as+1} as+11变成 s a s + 1 frac{s}{as+1} as+1s的形式,这里a=0.01。
2.3.2 减速器与传动装置
由公式(6-9)得到的 T 是由电机将要传递到负载侧(单杆)的力矩。考虑到齿轮传动中滑动摩擦等因素,在直流电机侧的输出扭矩 T 传递到负载侧时还会损失一部分的能量。
摩擦损失与电机侧输出扭矩 T 成比例,摩擦损失比例系数为 c ,则传到单杆的转轴一侧的单杆扭矩
τ
2
tau_2
τ2 为
τ
2
=
N
(
T
−
c
T
)
=
N
×
(
1
−
c
)
×
T
=
N
×
E
×
T
tau_2 = N(T - cT) = N×(1-c)×T = N×E×T
τ2=N(T−cT)=N×(1−c)×T=N×E×T
为了描述方便,将电机侧输出力矩 T 改名为
τ
1
tau_1
τ1,即
τ
1
tau_1
τ1=T,则上式为:
(6-10)
τ
2
=
N
×
E
×
τ
1
tau_2 = N×E×tau_1 tag{6-10}
τ2=N×E×τ1(6-10),式中,E = 1-c 被称为传导系数。
用公式(6-9)得到的结果再乘以系数 N 和 E 后,就是最终驱动单杆转动的力矩
τ
2
tau_2
τ2。
在simulink中完成减速器与传动装置的仿真模型。
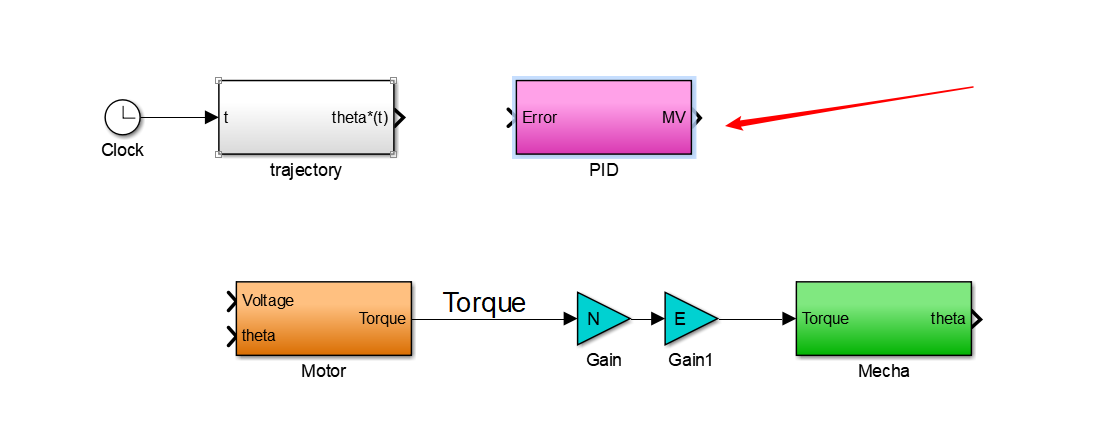
2.4 PID 控制的仿真模型
PID 控制器的仿真由两部分构成,一部分是 PID 控制子模块,一部分是输出限幅模块Saturation。
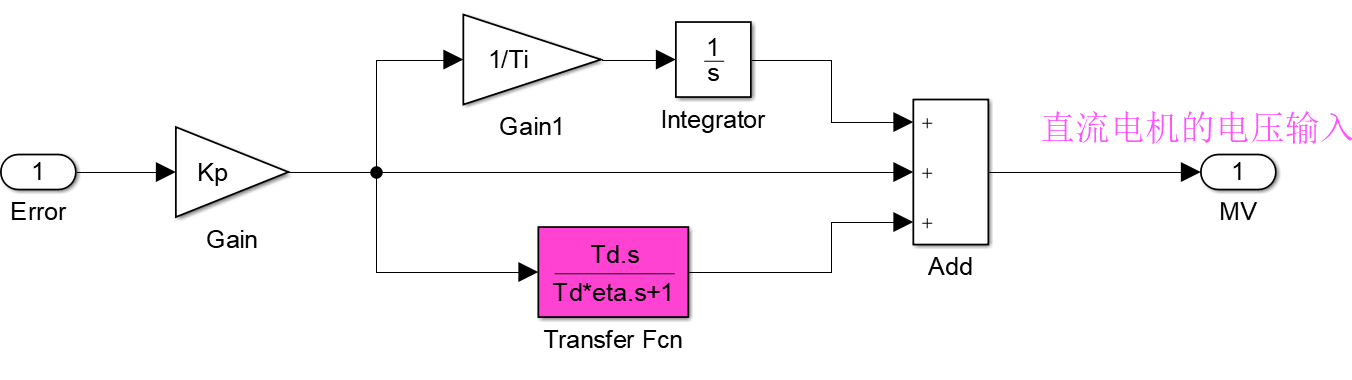
2.4.1 PID 控制器的仿真模型
PID 控制器的传递函数为:
(6-11)
D
(
s
)
=
U
(
s
)
E
(
s
)
=
K
p
[
1
+
1
s
T
I
+
s
T
D
]
D(s) =frac{U(s)}{E(s)} = K_p[1+frac{1}{sT_I}+sT_D] tag{6-11}
D(s)=E(s)U(s)=Kp[1+sTI1+sTD](6-11),用近似微分代替微分:
(6-11)
D
(
s
)
=
K
p
[
1
+
1
s
T
I
+
s
T
D
a
s
T
D
+
1
]
D(s) = K_p[1+frac{1}{sT_I}+frac{sT_D}{asT_D+1}] tag{6-11}
D(s)=Kp[1+sTI1+asTD+1sTD](6-11)
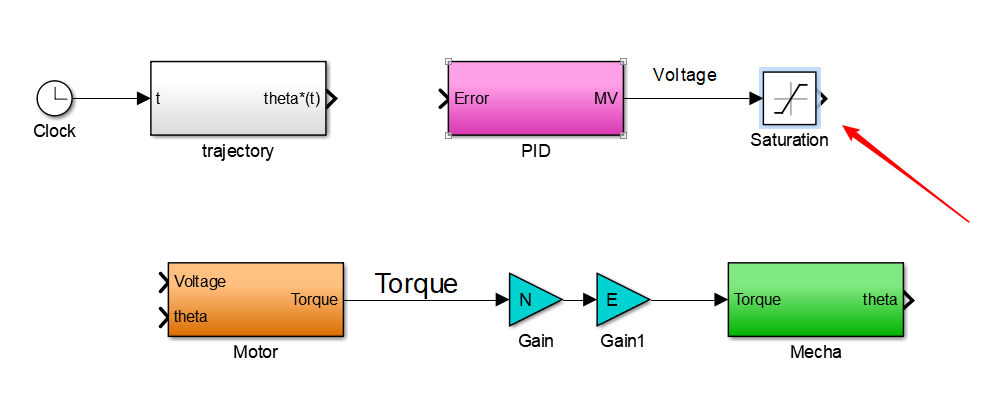
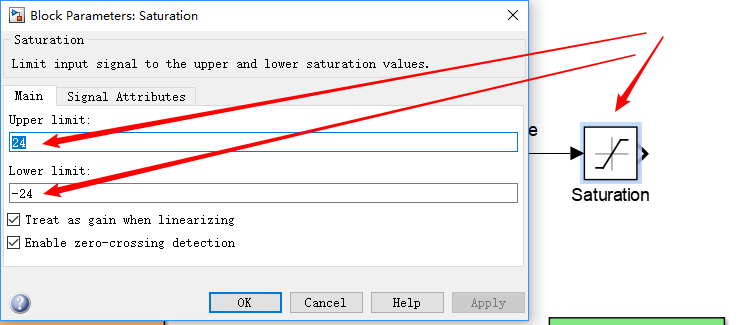
2.4.2 PID 输出量的上下限设定
PID控制器的输出量是直流电机的输入电压,因为直流电机的输入电压是有上下限的,如果超出限制则有可能造成电机的损坏。
上下限的设置通过Saturation Block(饱和模块)实现,将上下限分别设定为 +24 和 -24,即设定 PID 控制器输出的值将被限定在电压±24V 范围内再传递给直流电机。
2.5 构建整体仿真模型
- 因为 PID的输出是直流电机的电压,故
Saturation后接Moter的Voltage
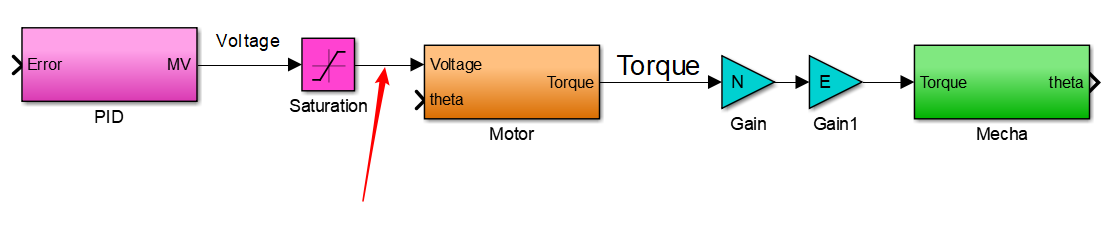
- 又系统的输出是角度
θ,故偏差应该是期望角度与输出角度的差值,以此作为 PID 控制器的输入,故连线如下:

- 在直流电机的仿真模块,由于公式(6-8)中用到
θ(s),故需要将输出引到Motor的输入中去。
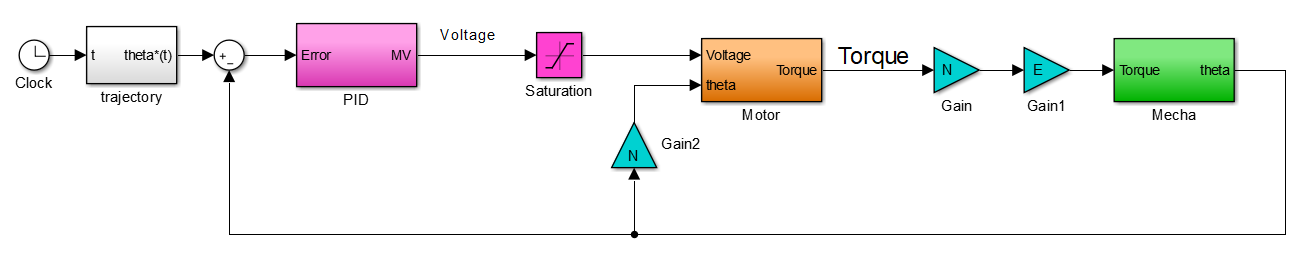
这里需要解释下增益N,即
t h e t a M e c h a × N = t h e t a M o t o r theta_{Mecha}×N=theta_{Motor} thetaMecha×N=thetaMotor
这是由于在直流电机模块中,存在的减速器。假设减速器链接的齿轮1和齿轮2的齿数分别为 n 1 n_1 n1 和 n 2 n_2 n2,则变速比 N 为:
N = n 2 n 1 N=frac{n_2}{n_1} N=n1n2
当直流电机的旋转角度为 θ 1 theta_1 θ1,单杆的旋转角度为 θ 2 theta_2 θ2 时,
θ 1 = N × θ 2 theta_1 = N ×theta_2 θ1=N×θ2
角度的变比正好与扭矩的变比相反。 - 拖入
goto和from,并将from接到示波器,便于观察图形
- 在
trajectory的输出接goto,信号为设定的角度 θ - 在
saturation的输出接goto,信号为 PID 输出的直流电机控制电压 - 在
Mecha输入处接goto,信号为电机输出到单杆侧的扭矩 - 在
Mecha的输出接goto,信号为系统输出的角度 θ - 将四路
goto信号对应的from接到示波器,如图。
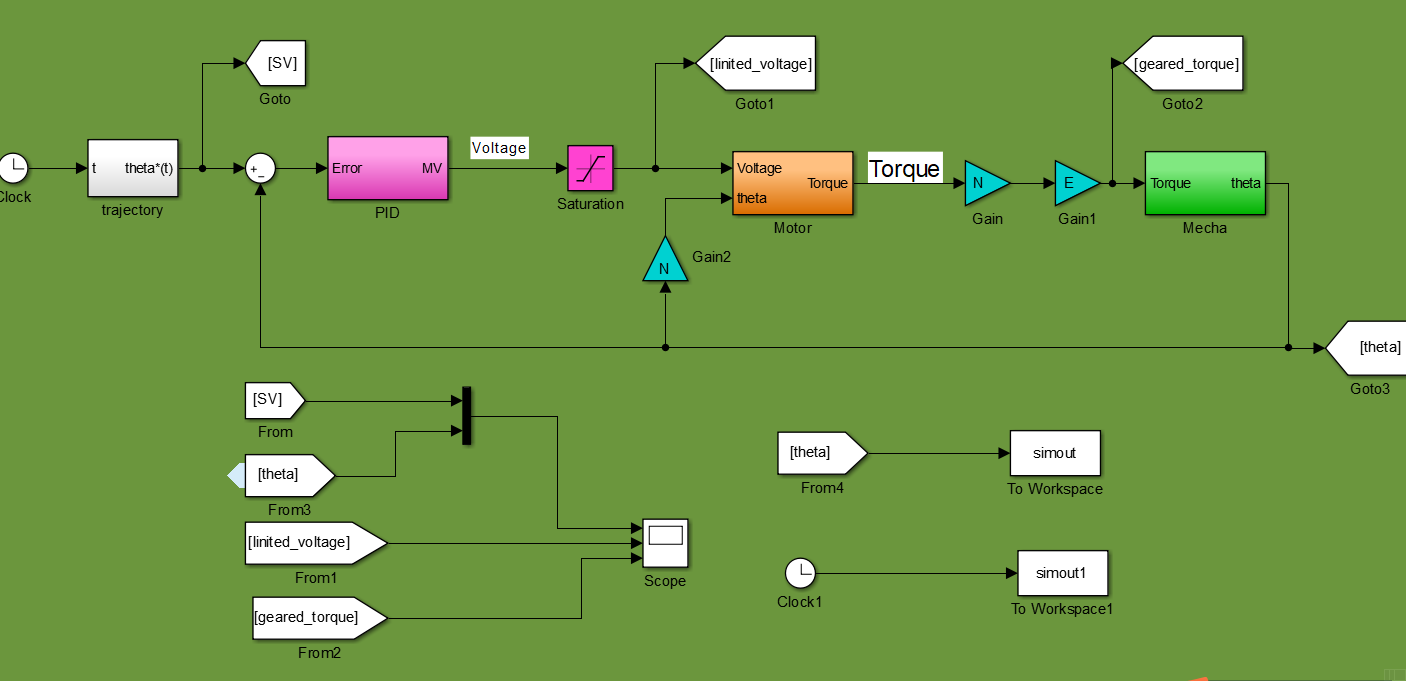
至此,单关节机器人的仿真搭建基本完成了。
3. 函数编写
3.1 initial_patam.m函数的编写
新建initial_patam.m函数,在此输入仿真所需要的初始化参数
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% initialize_para.m
% 第6章 参数设置
% 轨迹函数,机械和电气系统,减速器和控制器的PID参数
%
% Version 1.0 by Hiroumi Mita, CYBERNET SYSTEMS CO.,LTD.
% Version 1.5 by Hongtao Zhang, 2016/08/12
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clc; % 清屏
close all; % 关闭所有
clear; % 清除所有变量
% 轨迹函数的参数
delta = 0.25; % 轨迹函数中的 delta变量
% 机械参数
l1 = 0.2; %杆长 单位:[m]
w1 = 0.01; %杆宽[m]
h1 = 0.004; %杆高[m]
r1 = 0.1; %从杆端点到重心位置的长度[m],r1=0.5*l1
ro = 2690; %杆的材料密度 单位:[Kg*m^3]
m1 = l1*w1*h1*ro; %杆的质量[Kg]
Izzg1 = (1/12)*m1*(w1^2+l1^2); %杆的转动惯量,zz[kg*m^2]
Ixxg1 = (1/12)*m1*(w1^2+h1^2); %杆的转动惯量,xx[kg*m^2]
Iyyg1 = (1/12)*m1*(l1^2+h1^2); %杆的转动惯量,yy[kg*m^2]
c1 = 0.001; %杆的粘性系数[N*s/rad]
% 电气参数
Ra = 10; %电机电阻值[OM]
La = 4.4e-3; %电机电感值[H]
Kt = 0.05; %扭矩常数[N*m/A]
Ke = Kt; %反电力常数[V*s/rad]
J = 1e-5; %电机的转动惯量[kg*m^2]
Bm = 1e-6; %电机的粘性扭矩系数[N*s/rad]
% 减速器参数
N = 100; %齿轮数比
E = 0.7; %传递效率
% PID控制参数
Kp =100; %比例增益
Ti =0.1; %积分时间常数
Td =3; %微分时间常数
eta=0.1; %近似微分参数
3.2 ch6_plot.m函数的编写
新建ch6_plot.m函数,在此函数中绘制单杆的运动轨迹。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% ch6_plot.m
% 第6章 显示结果
%
% Version 1.0 by Hiroumi Mita, CYBERNET SYSTEMS CO.,LTD.
% Version 1.5 by Hongtao Zhang, 2016/08/12
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
close all;
xt=l1*cos(theta); % x轴上随时间的变化值
yt=l1*sin(theta); % y轴上随时间的变化值
figure(1)
axis square
for ii=1:length(t) % 循环,从 ii=1,一直到 ii = length(t)
x1=[0 xt(ii)];
y1=[0 yt(ii)];
h1= line(x1,y1);
if 0<=t(ii)&&t(ii)<=0.5 %加速期间
set(h1,'color','r');
set(h1,'lineWidth',2);
end
if 0.5<t(ii)&&t(ii)<=2.0 %匀速期间
set(h1,'color','g');
set(h1,'lineWidth',2);
end
if 2.0<t(ii)&&t(ii)<=2.5 %减速期间
set(h1,'color','b');
set(h1,'lineWidth',2);
end
end
for ii=1:length(t)-1
x2=[xt(ii) xt(ii+1)];
y2=[yt(ii) yt(ii+1)];
h2= line(x2,y2);
set(h2,'color','k');
set(h2,'lineWidth',1);
end
% 绘制x轴
h3=line([-0.3 0.3],[0 0]); %给出x轴的数值范围
set(h3,'color','k');
set(h3,'lineWidth',1);
% 绘制y轴
h4=line([0 0],[-0.3 0.3]); %给出y轴的数值范围
set(h4,'color','k');
set(h4,'lineWidth',1);
xlim([-0.3 0.3])
ylim([-0.3 0.3])
4. 运行仿真
- 首先运行
initialize_para.m函数,给仿真系统提供初始化参数 - 双击仿真系统中的示波器,并运行
ch6_sim的仿真 - 观察到示波器输出如下
第一幅是运动轨迹函数;第二幅是电机的输入电压,第三幅是单杆侧力矩。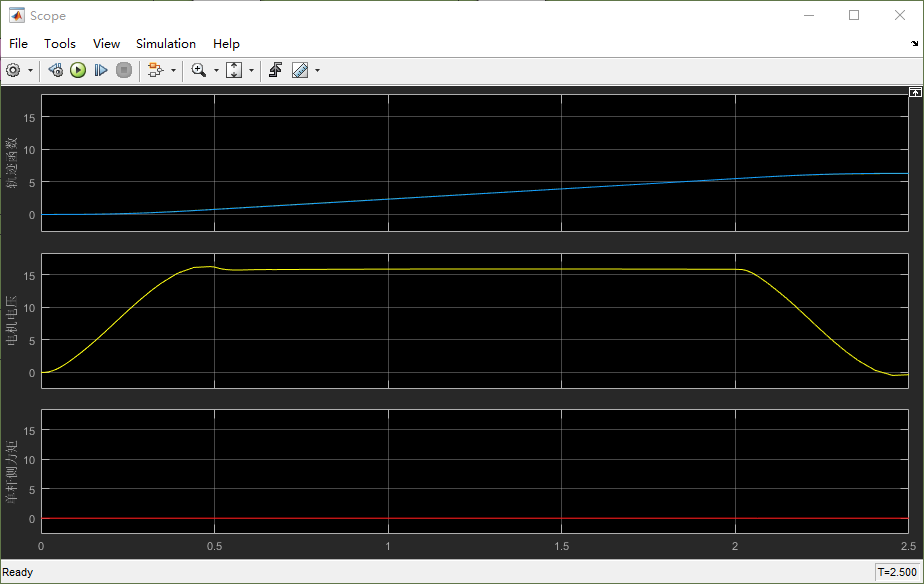
- 运行
ch6_plot.m函数,得到单杆运动轨迹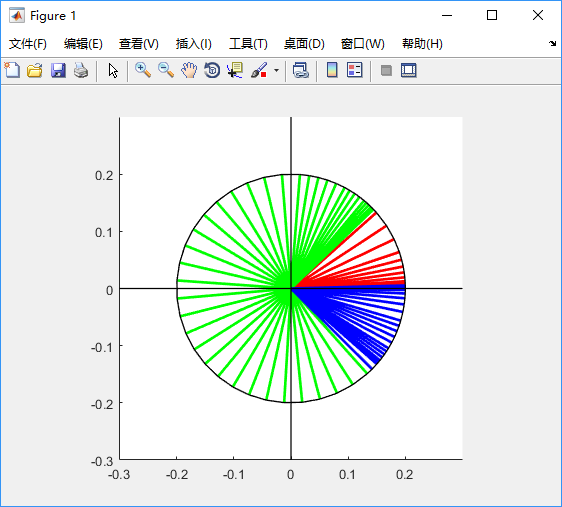
5. 资源下载
感谢《用MATLAB玩转机器人》的作者将此仿真模型提供了完整的资源下载。下载地址即下载教程如下:http://cip.com.cn


最后
以上就是飘逸小蘑菇最近收集整理的关于用MATLAB玩转机器人--第六章 用MATLAB玩转单关节机器人的全部内容,更多相关用MATLAB玩转机器人--第六章内容请搜索靠谱客的其他文章。








发表评论 取消回复