转载请注明作者和出处: http://blog.csdn.net/john_bh/
文章目录
- 1. I O N 和 I P N ION和IPN ION和IPN
- 2. M N E MNE MNE (the mean normalized error)
- 3 A U C a AUCa AUCa(the area-under-the-curve)
- 4. C E D CED CED (the Cumulative Errors Distribution curve)
1. I O N 和 I P N ION和IPN ION和IPN
-
I
O
N
ION
ION:inter-ocular distance normalized error
e i = ∣ ∣ x p r e i − x g t i ∣ ∣ 2 d I O D e_i=frac{||x_{pre_i}-x_{gt_i}||_2}{d_{IOD}} ei=dIOD∣∣xprei−xgti∣∣2
其中
x
p
r
e
i
x_{pre_i}
xprei表示预测坐标点,
x
g
t
i
x_{gt_i}
xgti表示ground-truth,
d
I
O
D
=
D
(
(
x
36
,
y
36
)
,
(
x
45
,
y
45
)
)
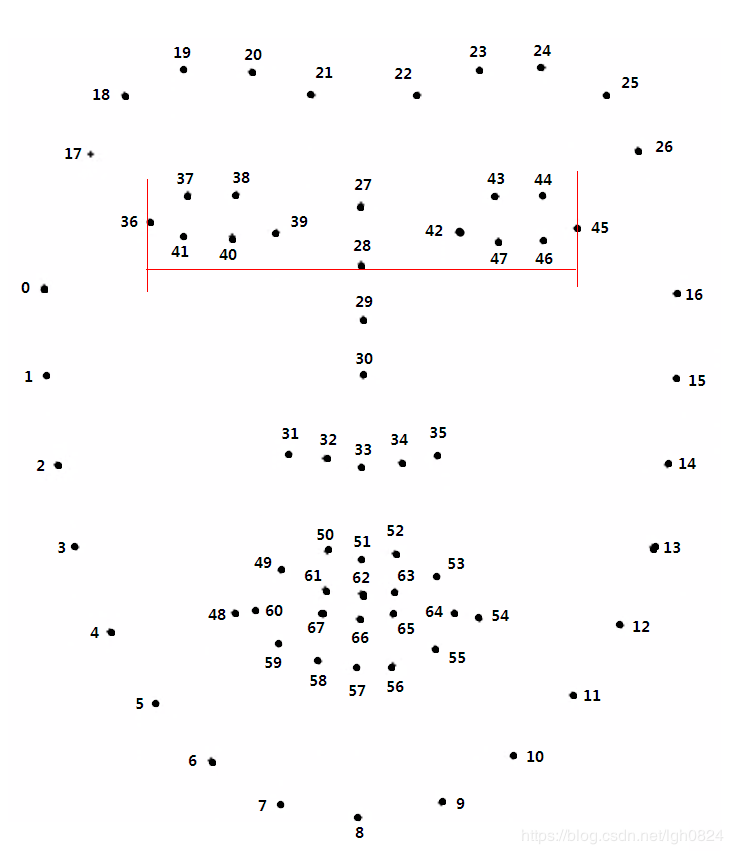
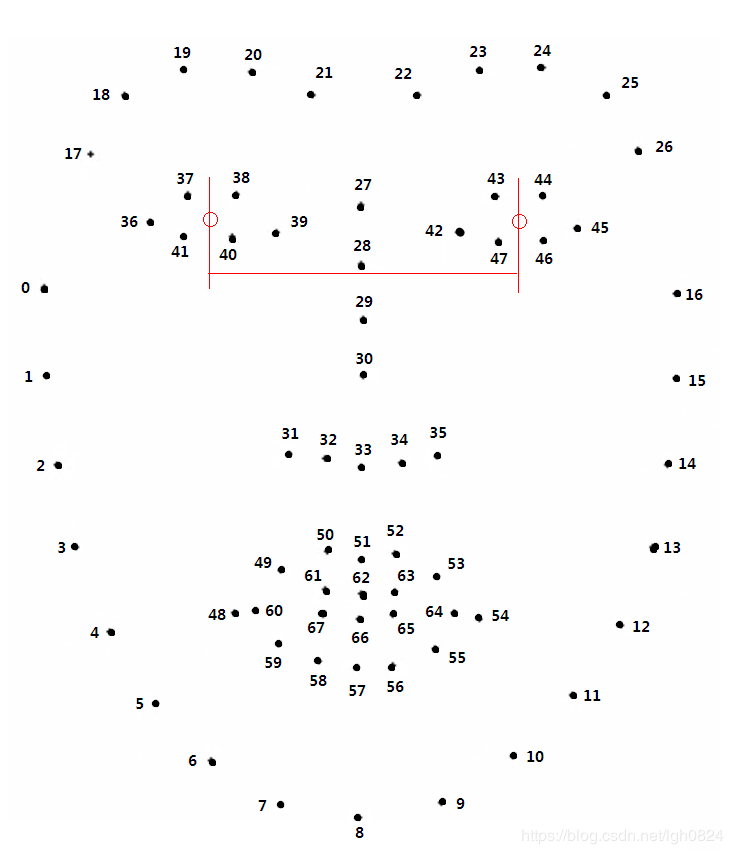
d_{IOD}= D((x_{36}, y_{36}) , (x_{45}, y_{45}))
dIOD=D((x36,y36),(x45,y45))表示两眼外眼角间距离(参考300W官方提供的 compute_error 代码),归一化该因素是为了消除因脸部尺寸不统一带来的不合理变化。
-
I
P
N
IPN
IPN:Inter-pupil distance normalized error
e i = ∣ ∣ x p r e i − x g t i ∣ ∣ 2 d I P D e_i=frac{||x_{pre_i}-x_{gt_i}||_2}{d_{IPD}} ei=dIPD∣∣xprei−xgti∣∣2
其中
x
p
r
e
i
x_{pre_i}
xprei表示预测坐标点,
x
g
t
i
x_{gt_i}
xgti表示ground-truth,
d
I
P
D
d_{IPD}
dIPD表示两眼瞳孔间距离。
计算瞳孔坐标,参考LAB计算方式
l
e
f
t
_
c
e
n
t
e
r
x
:
(
x
36
+
x
37
+
x
38
+
x
39
+
x
40
+
x
41
)
/
6
left_center_x: (x_{36}+x_{37}+x_{38}+x_{39}+x_{40}+x_{41})/6
left_centerx:(x36+x37+x38+x39+x40+x41)/6
l
e
f
t
_
c
e
n
t
e
r
y
:
(
y
36
+
y
37
+
y
38
+
y
39
+
y
40
+
y
41
)
/
6
left_center_y: (y_{36}+y_{37}+y_{38}+y_{39}+y_{40}+y_{41})/6
left_centery:(y36+y37+y38+y39+y40+y41)/6
r
i
g
h
t
_
c
e
n
t
e
r
x
:
(
x
42
+
x
43
+
x
44
+
x
45
+
x
46
+
x
47
)
/
6
right_center_x: (x_{42}+x_{43}+x_{44}+x_{45}+x_{46}+x_{47})/6
right_centerx:(x42+x43+x44+x45+x46+x47)/6
r
i
g
h
t
_
c
e
n
t
e
r
y
:
(
y
42
+
y
43
+
y
44
+
y
45
+
y
46
+
y
47
)
/
6
right_center_y: (y_{42}+y_{43}+y_{44}+y_{45}+y_{46}+y_{47})/6
right_centery:(y42+y43+y44+y45+y46+y47)/6
I
P
N
D
=
D
(
l
e
f
t
_
c
e
n
t
e
r
x
,
l
e
f
t
_
c
e
n
t
e
r
y
)
,
(
r
i
g
h
t
_
c
e
n
t
e
r
x
,
r
i
g
h
t
_
c
e
n
t
e
r
y
)
)
IPN_D = D{(left_center_x, left_center_y) , (right_center_x, right_center_y))}
IPND=D(left_centerx,left_centery),(right_centerx,right_centery))
当然其中 d I O D d_{IOD} dIOD也可以人脸shape外接矩形对角线长度代替
2. M N E MNE MNE (the mean normalized error)
e
=
∑
i
=
1
N
∣
∣
x
p
r
e
i
−
x
g
t
i
∣
∣
2
N
×
d
I
O
D
×
100
%
e=frac{sum^{N}_{i=1}||x_{pre_i}-x_{gt_i}||_2}{Ntimes d_{IOD}}times 100%
e=N×dIOD∑i=1N∣∣xprei−xgti∣∣2×100%
MNE是N个facial landmarks 基于ION或者IPN的平均误差.
3 A U C a AUCa AUCa(the area-under-the-curve)
A
U
C
a
AUCa
AUCa就是通过计算该曲线的面积进行评估
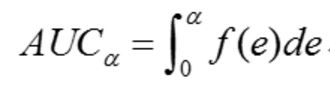
其中,
e
e
e表示归一化误差,
f
(
e
)
f(e)
f(e)表示累积误差分布函数。
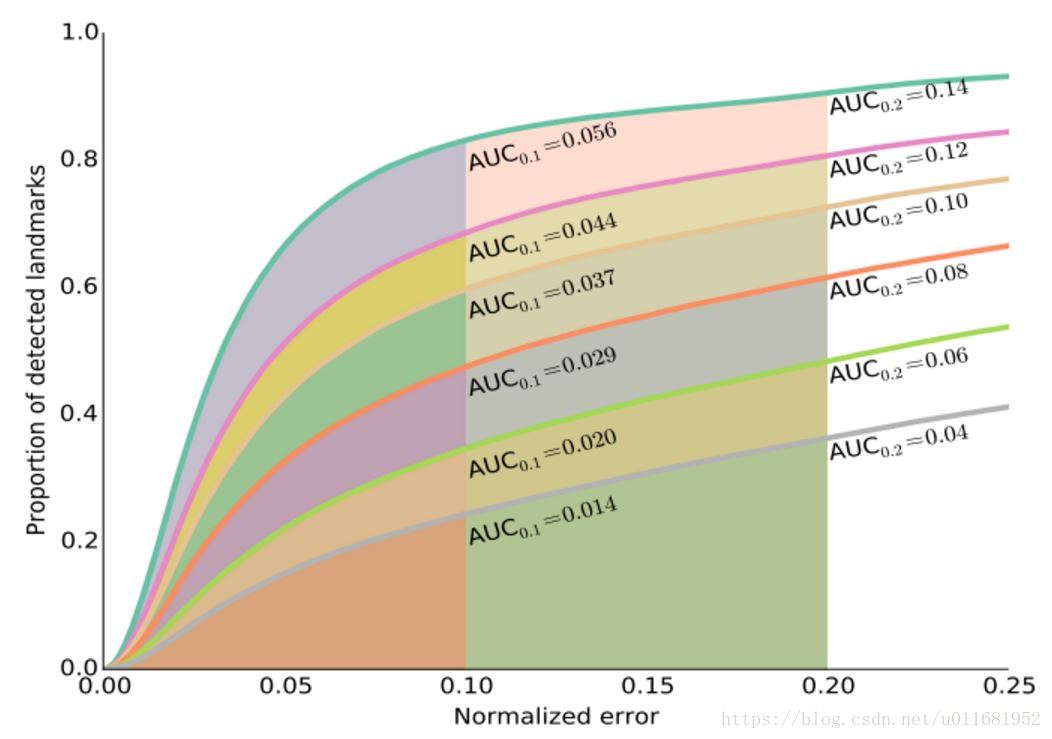
- 横坐标表示归一化误差值e(由1中式得)
- 纵坐标表示小于归一化误差e的特征点占所有特征点的比例
该曲线右下区域越大越好;值得一说的是,该方法的好处就在于AUCa值不像平均误差那样受单个点误差较大而发生较大变化,非常敏感
4. C E D CED CED (the Cumulative Errors Distribution curve)
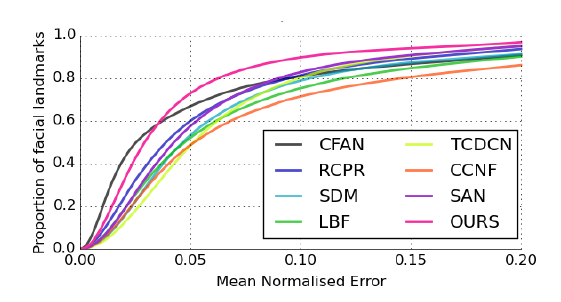
CED与AUC有些类似,但又不同,如上图所示(参考PFLD中CED曲线)。
- 横坐标表示归一化点与点间的平均误差(MNE),见方法2;
- 纵坐标表示小于归一化误差 e e e的样本占总样本的比例
参考链接:
人脸对齐算法常用评价标准
模型评估指标AUC(area under the curve
【人脸对齐-Landmarks】300W 数据集
最后
以上就是幽默蜡烛最近收集整理的关于人脸对齐算法常用评价标准总结1. I O N 和 I P N ION和IPN 的全部内容,更多相关人脸对齐算法常用评价标准总结1. 内容请搜索靠谱客的其他文章。








发表评论 取消回复