行进系统:由轮子、减速电机、电机驱动器、底板组成,具有在一定平面上移动的能力。
轮子的类型:
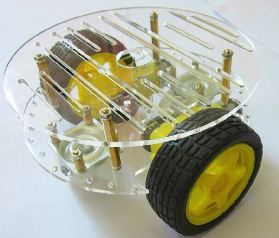
- 普通轮: 运动简单,控制简单。移动方向和轮子方向一样。
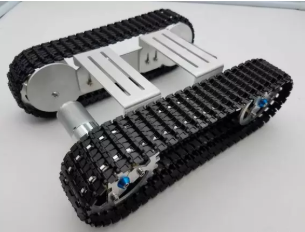
- 履带型: 适合不平坦地面
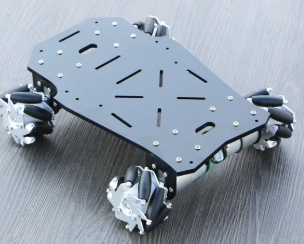
- 麦克纳姆轮: 转向灵活,控制困难。
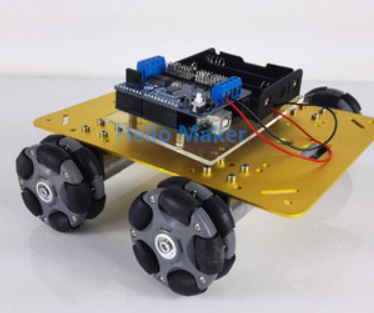
- 来福轮: 转向灵活,控制较为简单。
- 支撑轮: 无动力,万向轮

结构形式:
- 双普通轮加一支撑轮
只需要两个减速电机,小车的转向、进退由电机的速度、正反转控制,控制简单,常用于循迹小车、避障小车等。

- 双普通轮加俩支撑轮
常搭配圆形底盘,可避障。对称分布,使得转向比一个支撑轮的简单。
- 四普通轮
控制走直线简单平稳,但转向比较困难。

- 履带式
适合不平坦的运行面,结构比较复杂。
- 四麦克纳姆轮
控制好的话非常灵活,左右平移,顺逆旋转,前进后退像跳舞。
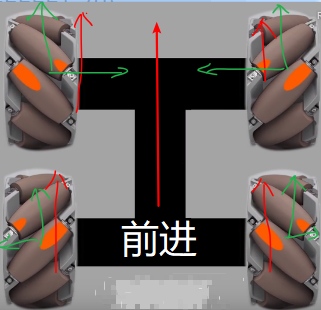
对此安装方式的控制方法:
前进:四轮前转,如红线所示,前后两对轮的对向力和背向力(如绿线)相互抵消,只有前进的力。后退同理。(轮子与地面有摩擦力,此文中提到的力为摩擦力反作用力)
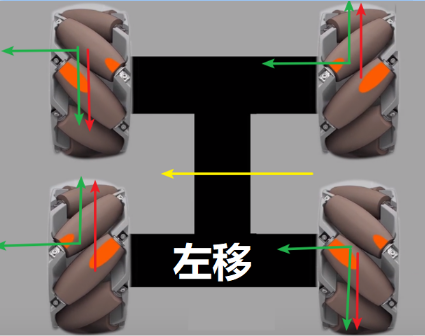
左移:左侧轮向里转,右侧轮向外转,如红线所示。左右两侧轮的前进力和后退力(如绿线)相互抵消,只有左移的力。右移同理。
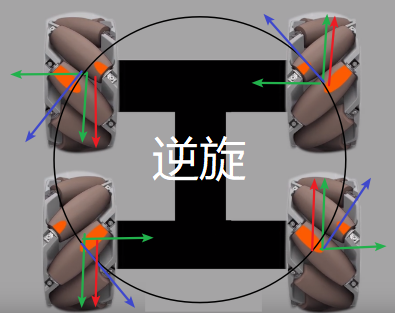
旋转:
左侧轮往后,右轮往前转,即可合成逆时针的切向力(如紫色),使得小车逆时针旋转。右旋同理,即左轮往前,右轮往后转。
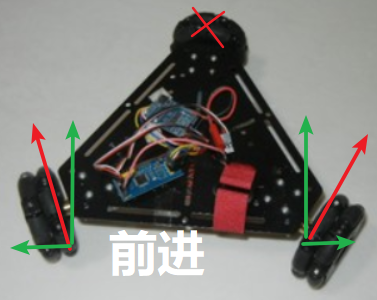
- 三来福轮
控制好的话非常灵活,顺逆旋转,前进后退像跳舞。

进退:一轮不动,两轮正反转,双侧力抵消,只剩前进或后退的力。
旋转:三轮转向一致即可顺逆旋转。

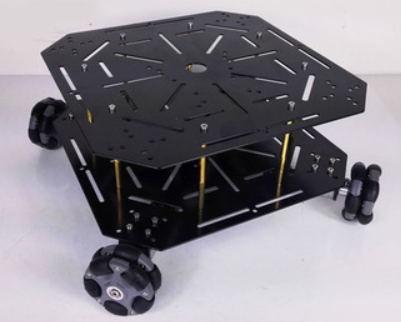
- 四来福轮
控制好的话非常灵活,左右平移,顺逆旋转,前进后退像跳舞。其控制也简单灵活,与上述相似,读者可自行斟酌。
结语:
行进系统是很重要的系统,其结构形式决定控制方式,而结构形式取决于功能,所以需要根据功能来选择合适的最佳的结构。
此篇收录于专栏【手把手教你做OpenMV小车】,总篇链接:https://blog.csdn.net/qq_42807924/article/details/86585757
(本文为吾本虚无原创,禁止任何形式转载)
全文完。
最后
以上就是甜蜜路灯最近收集整理的关于【OpenMV小车——第1.1篇】行进系统的设计的全部内容,更多相关【OpenMV小车——第1.1篇】行进系统内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复