基于Simulink的平面三连杆系统仿真
如题,今天的主角是平面三连杆机器人。
是一个关于平面三连杆机器人的Simulink仿真,这个仿真做的比较系统,可以说涵盖了专栏的所有内容,大家跟着我把这个三连杆弄出来,就基本来说做自动化机器人方面课设是没问题了。话不多说,专栏里只讲硬核,上图:
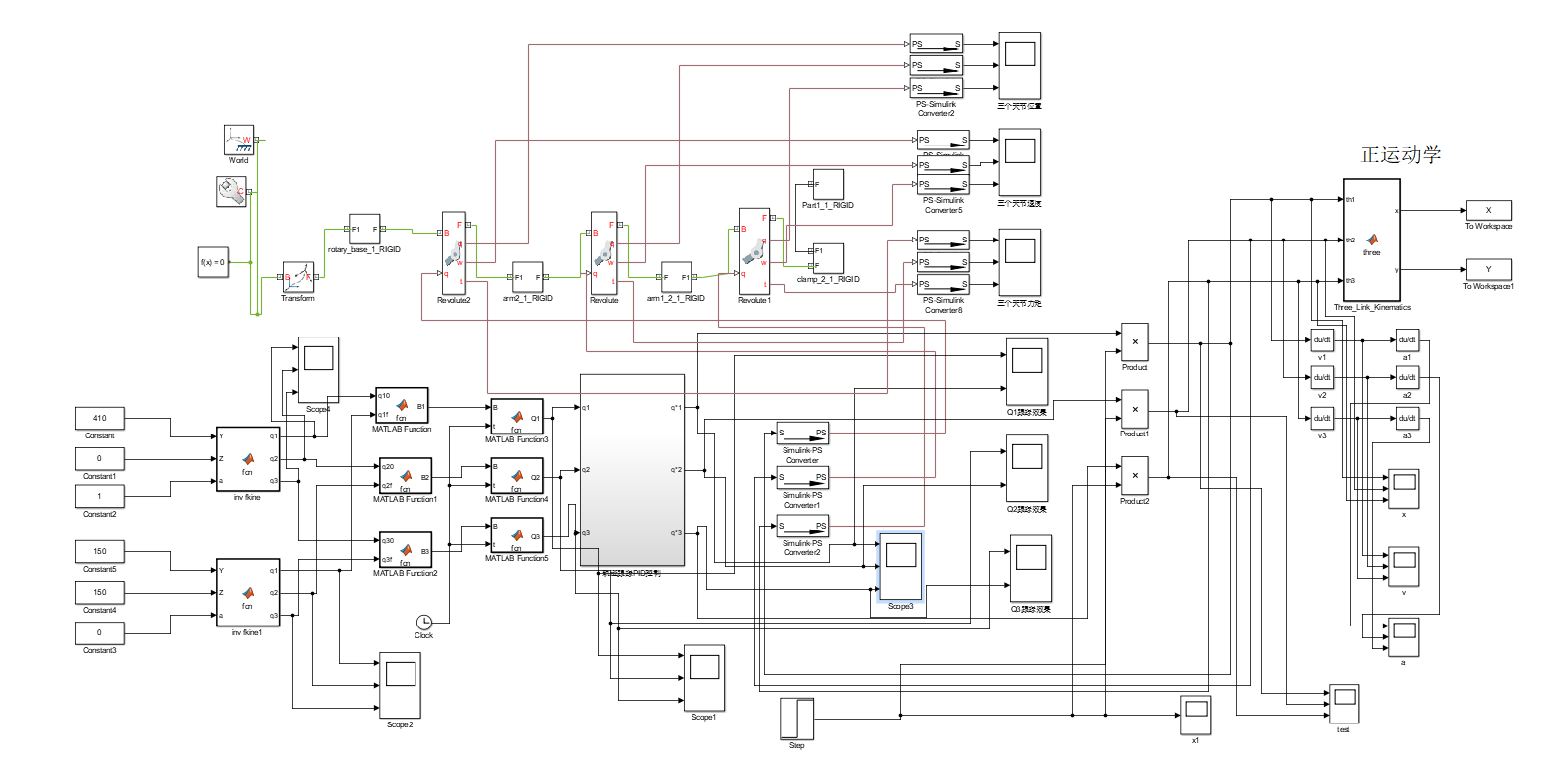
没把图放大的原因是想让大家看清楚一个系统 的全貌,这样思路会清晰些,我先来简单说说,首先这个系统分为几个大模块,从最左边开始,是一个任务空间有两个必经点,机器人末端需要依次达到这两个点位,然后连着逆运动学,求解出达到该两个位置的角度值,然后采用三次多项式进行简单规划,当然如果你想用其他规划方法也是可以的,然后进入控制器和机器人动力学模块,控制器同样也是采用最基本的PID控制,如果想要更好的控制方法也是换汤不换药了,然后通过动力学模型后实现的是一个轨迹跟踪,确保各个关节精确的运动,然后把控制输出传给物理模型,是用Multibody搭建的,最后运行仿真就能看到三自由度机器人一个大致的运动:
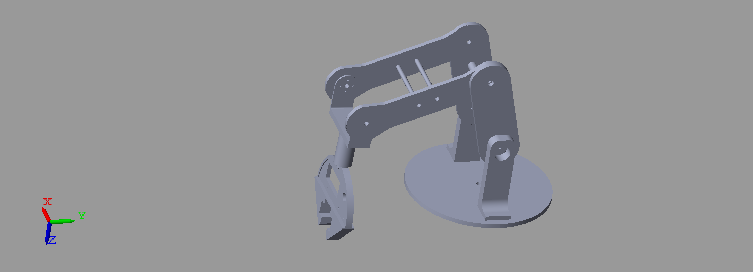
因为不知道怎么转换GIF,所以没弄成动图,可以脑补一下,哈哈哈哈哈哈,话不多说,接下来的专栏里就会分别介绍这各个模块,以及怎么搭建的,记得关注哟!!!
最后
以上就是专注心锁最近收集整理的关于Simulink系统仿真(平面三连杆机构)基于Simulink的平面三连杆系统仿真的全部内容,更多相关Simulink系统仿真(平面三连杆机构)基于Simulink内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复