目录
1. 什么是代数环
2. 如何解决代数环
3. 多个s函数导致的代数环
4. 源代码
1. 什么是代数环
在simulink仿真过程中,当输入信号直接取决于输出信号,同时输出信号也直接取决于输入信号时,由于数字计算的时序性,而出现的由于没有输入无法计算输出,没有输出也无法得到输入的“死循环” ,称之为代数环。
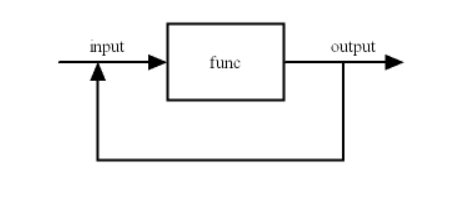
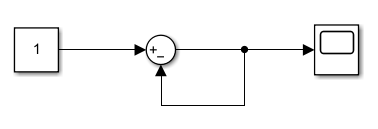
如下图所示,output = func(input+output)。初始时,由于没有output,所以不能计算func函数;但是为了得到output,又必须要计算func。如此往复就形成了代数环。
2. 如何解决代数环
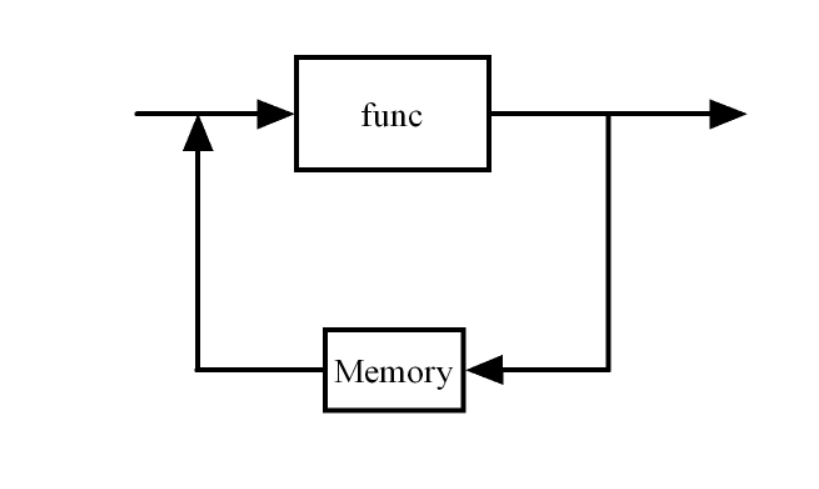
——连续模型
对于连续模型,可以在反馈通道添加Memory模块延时

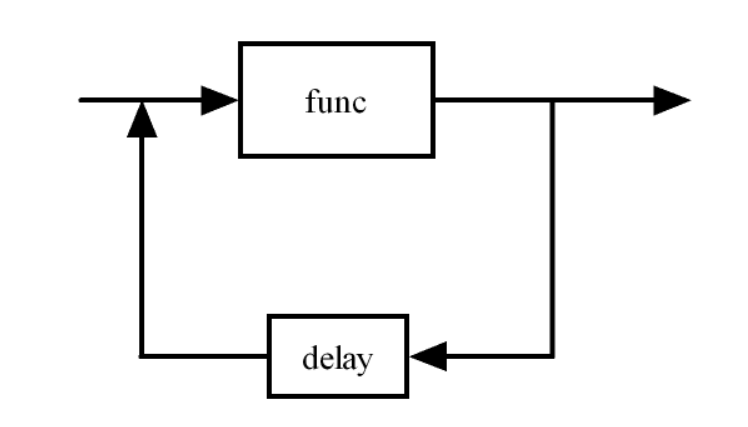
——离散模型
对于离散模型,可以在反馈通道添加delay模块延时
3. 多个s函数导致的代数环
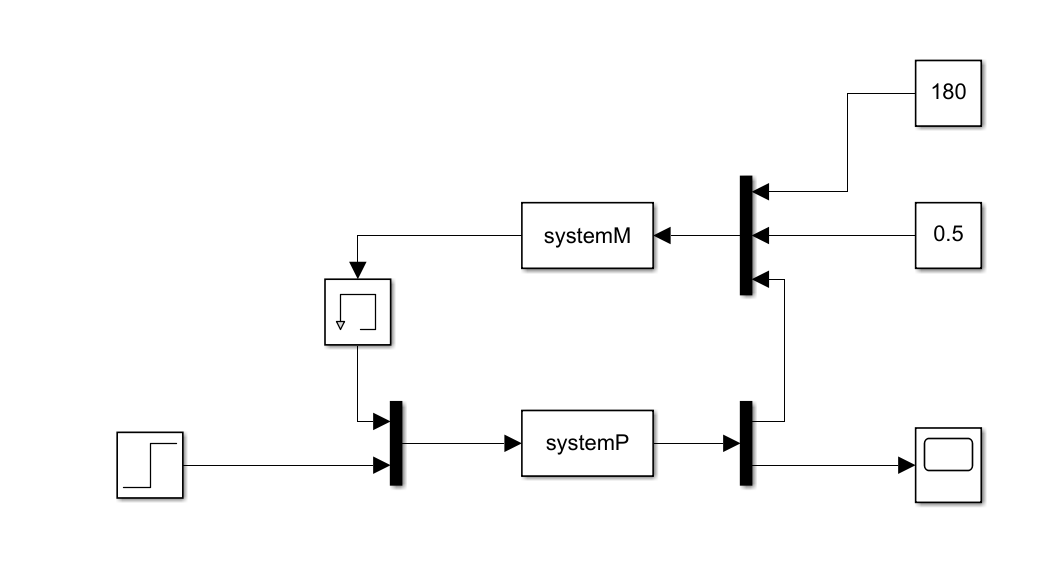
对于控制系统的仿真来说,很少会出现代数环的问题。下图这种系统就会出现代数环,但是这种系统本身就不存在(至少控制系统不会出现这种玩意)。
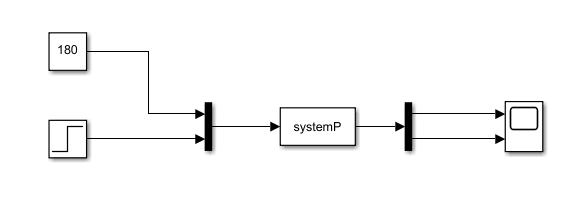
当simulink中的模块不足以完成建模时,常用的方法就是使用s函数了。如果只是一个s函数建立的模型,例如下图,也不会出现代数环的问题(如果简单粗暴的用s函数建立上图那种模型当我没说)。
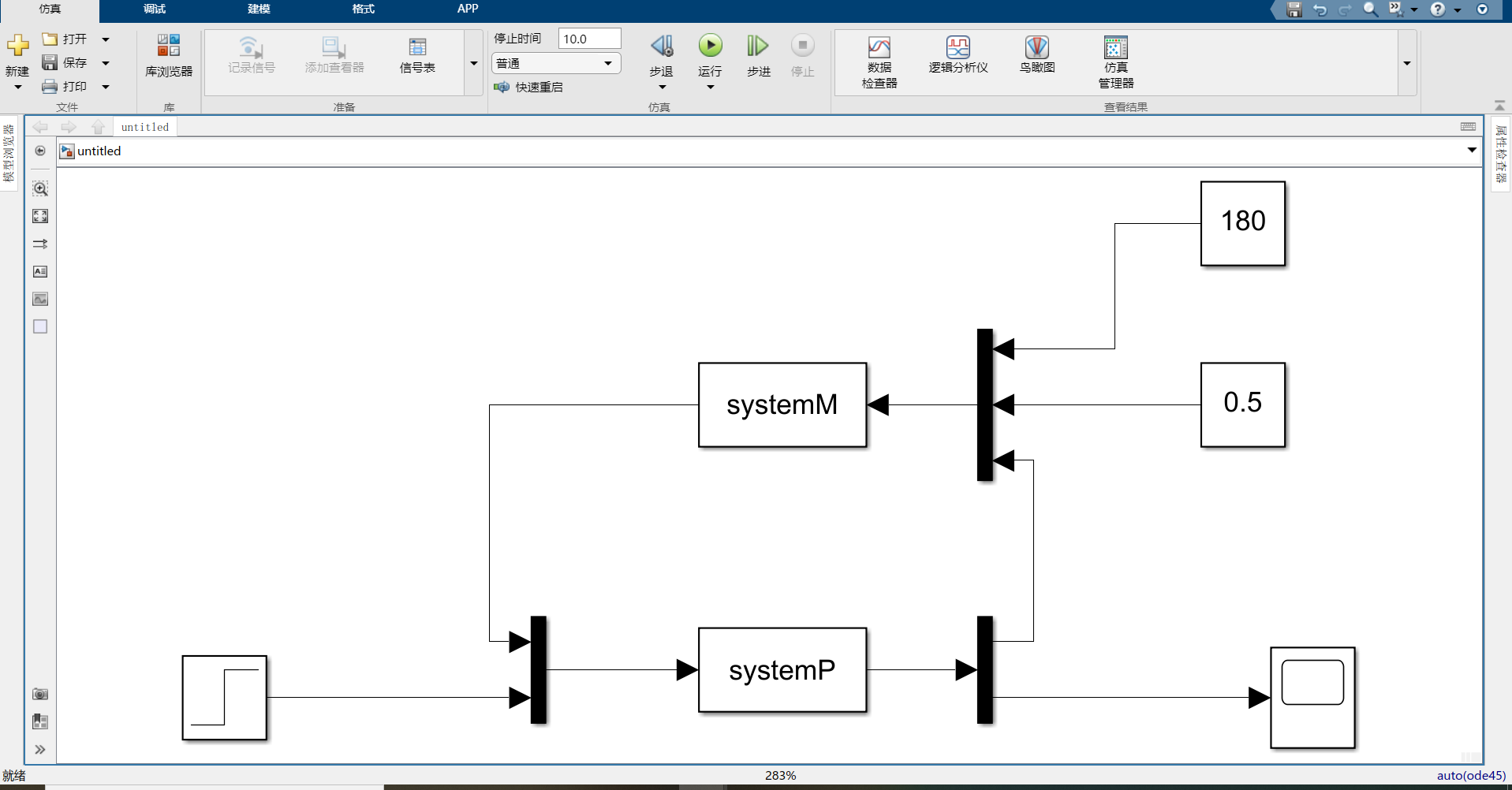
如果用到多个s函数,如下图,就会提示代数环的警告了。
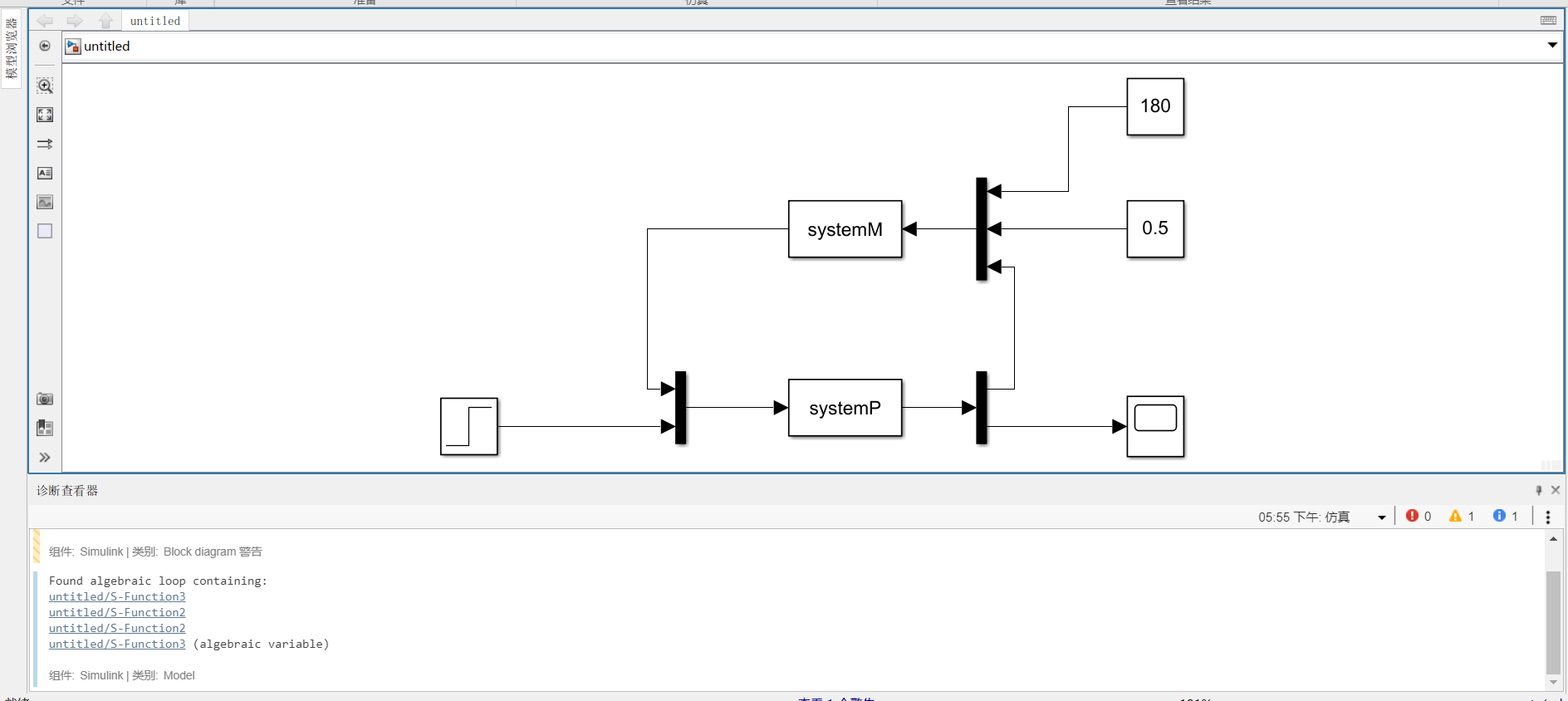
systemP的模型:(源代码放最后啦)
systemM的模型:(源代码放最后啦)
①
②
③
④
对于这种情况如果我们加入Memory模块做延时,虽然能解决代数环的问题,但是如果系统本身不是稳定的,延时环节会让系统产生震荡。
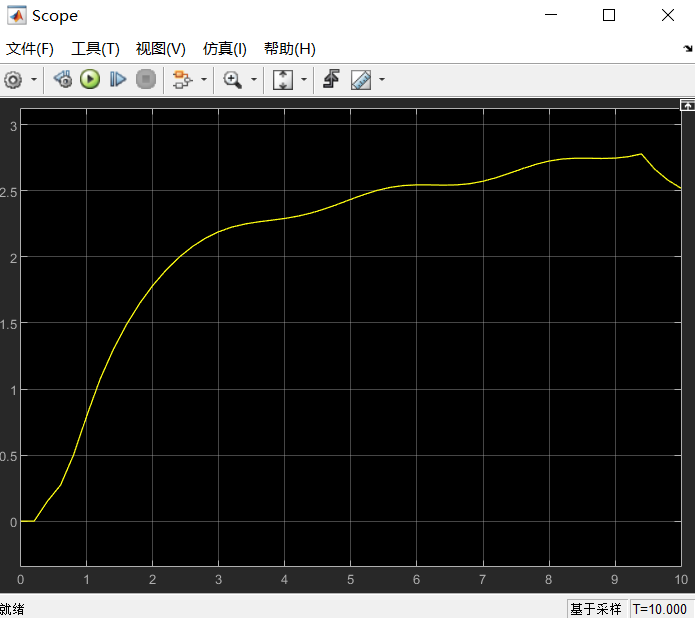
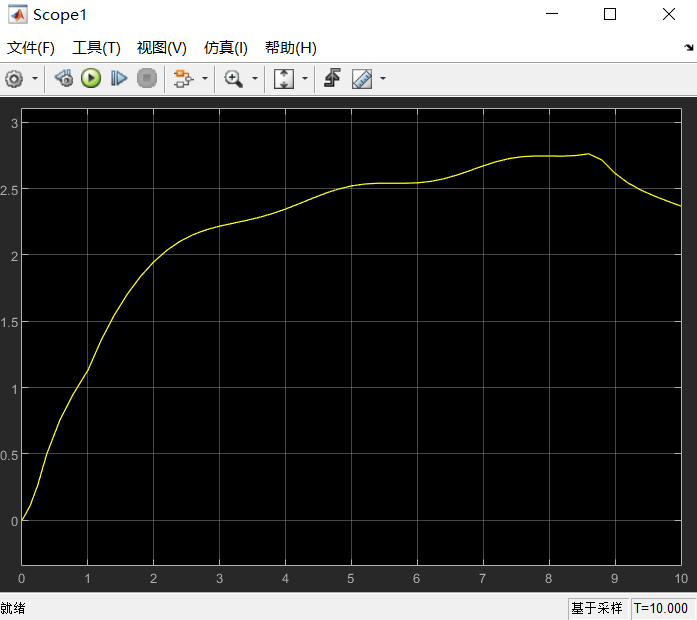
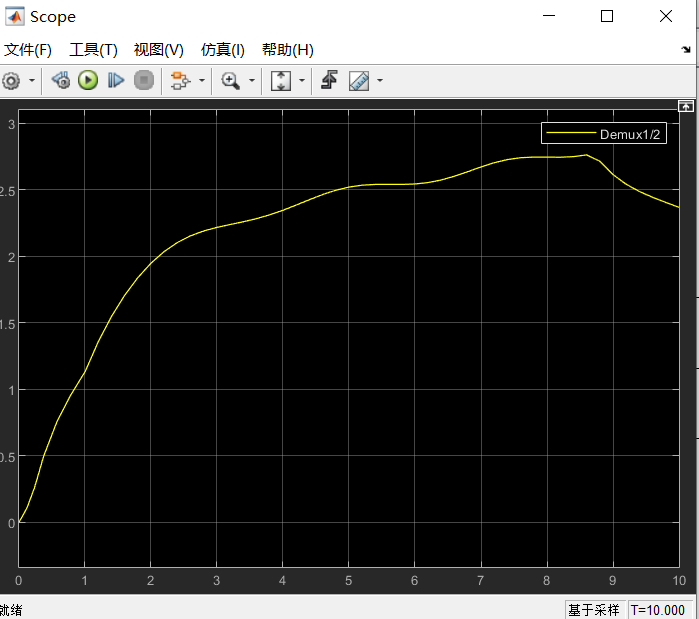
将加入Memory和没加Memory的两种输出的波形图对比:(本身搭建的系统就没有意义,所以不分析,将分析另外一个波形图,以此说明差异)
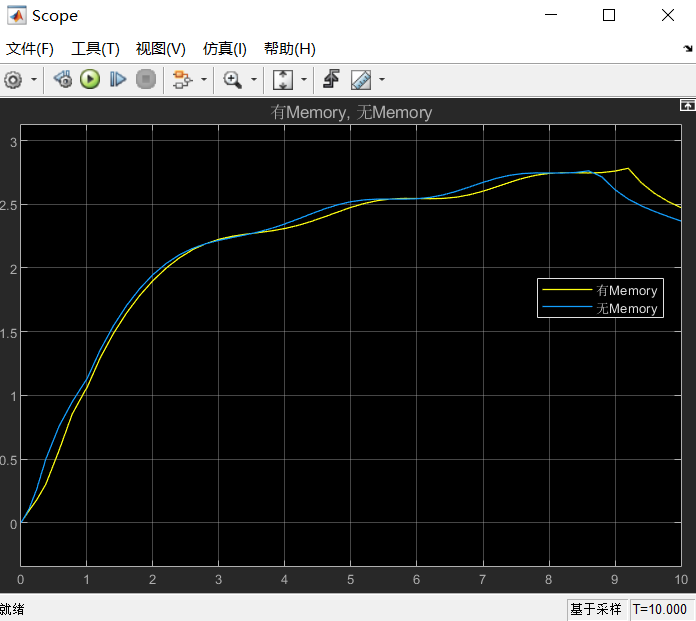
上面的两个模型没有严密的逻辑分析,紧供分析代数环,所以对于系统震荡的问题不好分析,所以在此插入我另外一个仿真中遇到的两个图(也是systemM和systemP构成的仿真,只是系统严谨)
下图是加入Memory延时,导致机器学习训练收敛性很差
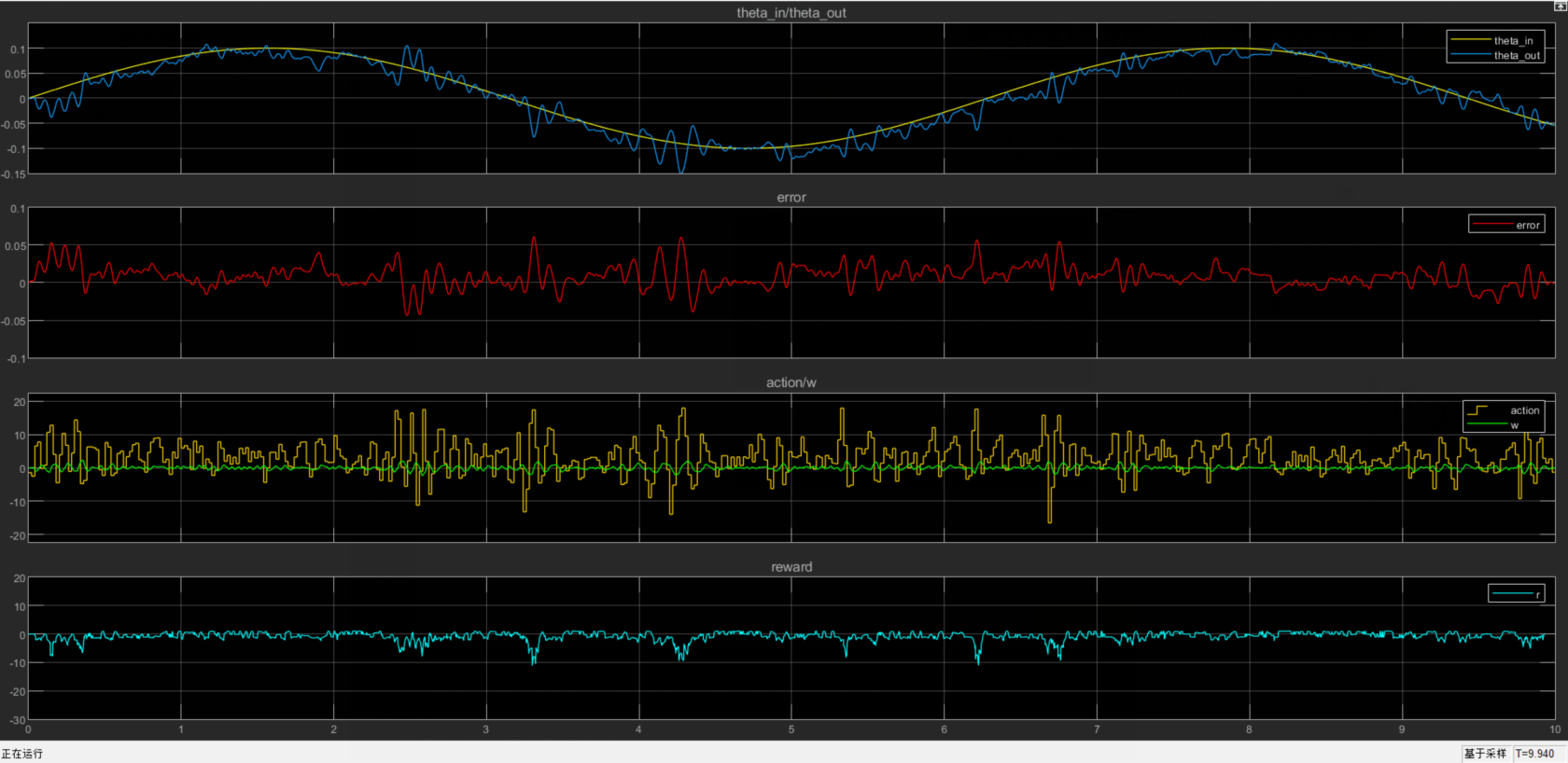
下图是去掉延时,解决代数环后,通过机器学习后的控制波形
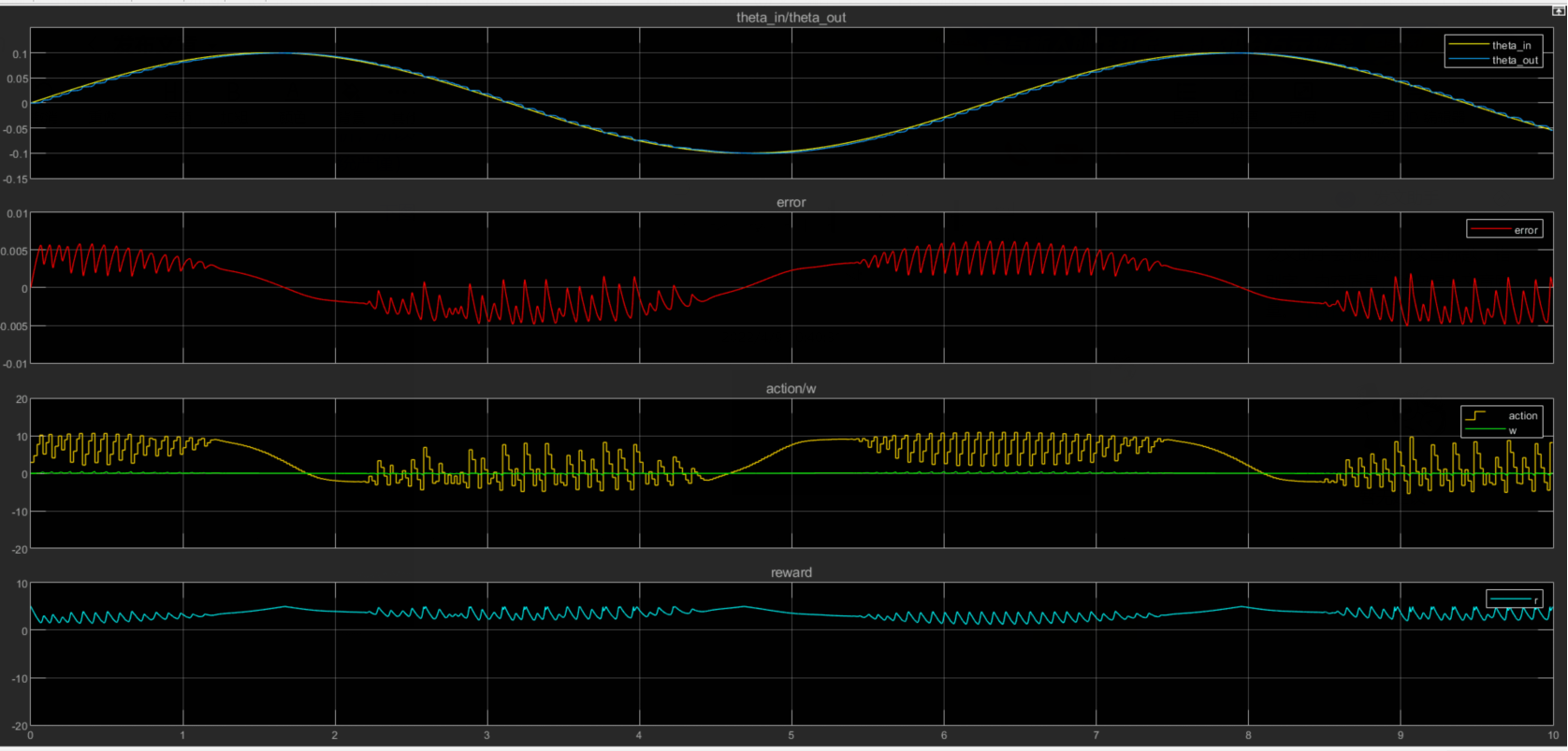
很容易发现,第二个的效果很好啦
延时对不稳定系统的影响还是很大的。对于多个s函数,导致计算时序的影响,出现代数环的问题,我们可以在s函数上做调整。
在s函数,flag等于0时,也就是初始化时,我们可以看到
sizes.DirFeedthrough
的设置,输入是否直接影响输出。将其值设为0(修改连续系统的DirFeedthrough,如果修改纯数学公式的会导致仿真错误,本文中systemP为连续系统,systemM为数学公式);仿真时就不会出现代数环的问题,且波形和有代数环时一样。
我在做仿真的时候,systemP和systemM可以用simulink提供的模块搭建,但是会比较麻烦,所以采用了s函数,后来也做了完全用simulink提供的模块搭建的仿真,控制效果也和s函数出现的效果类似。
4. 源代码
systemP:
%systemP
function [sys,x0,str,ts,simStateCompliance] = systemP(t,x,u,flag)
switch flag
case 0
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1
sys=mdlDerivatives(t,x,u);
case 2
sys=mdlUpdate(t,x,u);
case 3
sys=mdlOutputs(t,x,u);
case 4
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0];
str = [];
ts = [0 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
sys = [0 1;0 -1] * x + [0;1]*u(1) - [0;-1/2]*u(2);
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlOutputs(t,x,u)
sys = x;
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1;
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
systemM:
%systemM
function [sys,x0,str,ts,simStateCompliance] = systemM(t,x,u,flag)
switch flag
case 0
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1
sys=mdlDerivatives(t,x,u);
case 2
sys=mdlUpdate(t,x,u);
case 3
sys=mdlOutputs(t,x,u);
case 4
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0]; %[0 0]
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
sys = [];
function sys=mdlUpdate(t,x,u)
sys = [];
function sys=mdlOutputs(t,x,u)
n0 = u(1); %r/min
a = u(2)*pi/180; %degree
w = u(3); %rad/s
n = w*60/(2*pi); %r/min
M1 = 19.98 * sign(n0 - n) * (0.005 * sin(a) + 0.02 * cos(a));
Mmud = 2 / 15 * pi^2 * 0.05 * 1 * (0.0675^2 * 0.055^2 / (0.0675^2 - 0.055^2)) * (n0 - n);
Mw = 1.7987 * (tanh(32.8317 * w)-tanh(7.4921 * w)) + 0.9601 * tanh(6.0375 * w) + 0.0378 * w;
Mf = 0.1 * sin(w) + 0.32;
ML = M1+Mmud+Mw+Mf;
sys = ML;
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1;
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];
最后
以上就是不安哈密瓜最近收集整理的关于如何解决simulink控制系统仿真中的代数环的全部内容,更多相关如何解决simulink控制系统仿真中内容请搜索靠谱客的其他文章。








发表评论 取消回复