RFID的无线定位仍是通过测量其射频信号(电磁波)的传输时间、幅度(即射频信号强度)、相位等参数推算待测物的空间位置信息。按照定位的方法是否以测距为基础,目前可将基于RFID技术的定位算法分为基于测距算法定位和基于非测距定位两大类。常见的基于测距的算法是通过测量节点间的距离或角度信息并结合三边、多边测量或最大似然估计等进行定位计算的。而基于非测距算法一般是根据网络连通性、链路质量或场景分析等特征信息实现节点定位。
1. 基于测距的RFID定位
到达角度法(angle of arrival,AOA):定位原理利用了接收信号天线具有方向性的特性,根据电子标签发射信号的到达方向来判断电子标签的位置。在不考虑理论误差的情况下,利用两个阅读器天线来测量电子标签的信号到达方向,便可通过以两个阅读器为起点在信号到达方向上的两条直线的交点来确定电子标签所在的位置。虽然基于到达角度法定位的方法看起来比较简单易实现,但实际实现起来却存在诸多困难。首先要保证阅读器与标签之间信号视距传播,否则由于非视距引起的信号绕射、多径的影响,使用电子标签发送的信号从不同与本来的方向到达阅读器,从而造成测量方向上偏差,这样计算出来的坐标肯定也是偏离其实际位置。再者现有定向天线的分辨率也很有限,到达角度法定位精度不仅与测得的角度有关,还与两阅读器间的距离有关,当两个阅读器的距离比较远时,测得角度的误差即使很小,对定位效果的影响是很大的。最后该算法还需要天线具有方向性,但是目前的射频芯片一般都不具备这样的功能,若使用到达角度定位法,那阅读器还得配备特殊天线,这在一定程度上增加了定位系统的成本。
到达时间法(time of arrival,TOA):基本定位原理是通过测量阅读器与电子标签之间射频信号的传播时间t来计量,再根据电磁波的传播速度c=3.0×10^8m/s,利用公式s=ct计算出阅读器与电子标签之间的距离。设置多个阅读器,通过三边或多边定位法,利用各阅读器与电子标签之间的距离计算出电子标签所在的位置。基于到达时间法的定位方法对于阅读器与电子标签间的距离远近有很好的适应性,但由于电磁波传播速度极快,所以即使极其微小的时间误差也可以引起较大的距离上的误差。另外,基于到达时间法的定位方法依然受阴影效应与多径效应的制约,使得该算法测距精度偏低。
到达时间差法(timedifference of arrival,TDOA):基本定位原理与到达时间法相类似,也是通过测量信号从信号接收端与信号发送端的传输时间来确定目标所处的位置。不同之处在于到达时间差法测量的是射频信号经发送端到各信号接收端所需时间的差值。到达时间差法测量的是信号发射端与多个信号接收端间的相对差值。测量到达时间的差值主要有两种方法:第一种方法是测量多个到达时间,然后由各到达时间相减获取其到达时间差值;第二种方法是对各接收端接收到的信号进行相关性分析来获得其到达时间差。第一种方法具体的理论基础与到达时间法基本相同,不同的是获取到达时间后,利用双曲线的特性,使定位精度得到进一步的提升。
接收信号强度法(received signal strength indication,RSSI):定位首先需要确定室内信号的信号衰减模型,信号衰减模型是用来描述各位置信号强度衰减与传输距离之间关系,然后才是定位过程。定位过程中系统通过信号衰减模型,利用信号的衰减程度或者比较发射信号与接收信号的强度来确定待测点与各读写器间的距离。得到待测点与各阅读器间距离后,系统可通过三边测量定位法来计算待测点的具体位置。与其他几种定位方法相比,接收信号强度法在一定程度上能够抵消多径效应对室内定位精度的影响,这种特性比较适合于室内环境。不过当定位环境发生变化或是有其他信号存在时,原来建立起来的估算模型将不再准确,必须重新进行系统校正,也就是接收信号强度法的环境适应性差,这在实际的应用中很不方便。
2. 基于非测距的RFID定位
基于位置指纹的定位方法:基于位置指纹定位,也称数据库相关定位,它是以信号特征参数建立数据库,依赖的是标签在不同位置发出信号强度不一样,通过将实际接收信号与数据库中的信号特征参数进行对比来实现移动目标的定位。由于信号的多径传播对环境有着非常强的依赖性,因而对于每个位置来说,位置上信道的多径结构是唯一的,终端发射的无线电波经过折射和反射,产生于周围环境密切相关的特定模式的多径信号,因此这样的多径特性被认为是这个位置的“指纹”,所以该技术被称为于位置指纹定位。位置指纹定位的实施一般可分为两个阶段:第一阶段为训练阶段,也叫离线阶段,其主要工作是采集所需定位区域内各个参考节点的信号特征参数,如信号强度,将一组指纹信息对应一个特定的位置,形成位置指纹数据库。第二阶段为定位阶段,也称在线阶段,利用接收机测量接收信号的对应参数,采用匹配算法来确定数据库中哪组数据与之相匹配,从而得出目标的实际位置。
邻近LANDMARC算法:2003年由香港科技大学Lionel M.Ni、刘云浩及密歇根大学 Yiucho Lau、Abhishek P.Patil等人构成的课题组提出了LANDMARC定位系统,该系统是基于有源RFID校验的动态定位识别系统。LANDMARC算法能过实现室内定位主要是依据阅读器检测到电子标签在不同的位置的信号收信场强不同。其工作原理是通过引入参考标签动态捕捉环境信息来替代阅读器的离线数据,比较参考标签和待定位标签在多个阅读器上的收信场强差异,基于场强欧式距离选取近邻参考标签,利用残差加权算法确定待定位标签的物理位置,LANDMARC算法不仅降低了系统成本,提高了系统的环境适应能力,而且具有比较理想的室内定位精度。
相位全息图定位算法:借鉴雷达领域的合成孔径原理,利用运动的天线(或者标签)形成合成孔径雷达(或者逆合成孔径雷达),并将定位区域细分为致密网格,通过相位特征构建一个评价函数,作为每个网格点可能是真实标签位置的权重,最后所获权重最大的点即为真实标签的位置。将所有的空位位置点的权重绘制在一起,构建一张权重分布图,称之为相位全息图,如图1所示。该方法在实际中精度最大可到mm级,对多径效应亦具有较大的鲁棒性。但是因为需要计算每个网格点的权重,计算负荷较大。
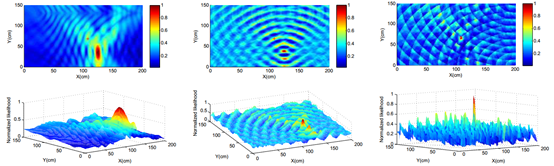
(a)初始相位全息图(b)增强全息图(c)差分增强相位全息图
图1 相位全息图
3. 基于RFID的导航技术
RFID导航是指利用RFID导引机器人达到预定位置的技术。由于RFID相较视觉,具有ID识别及成本低的优点,RFID导航技术近年来逐渐受到广大学者的关注。根据所利用射频信息的不同,分为基于RSSI和基于相位两大类,具体方法又分为:参考标签法、旋转天线法、RSSI梯度法、模糊控制法。
参考标签法:如图2所示,在移动机器人上安装有读写器及其天线,在环境中布置密集的参考标签阵列。参考标签阵列中每个标签的ID及其位置都经过离线标定,系统给定其中的一个标签为目的地标签。移动机器人首先依靠RFID临界读取的特性,获取机器人的位置和姿态信息,然后解算其下一步的运动方向,不断地修正其运动路径,最终达到目标标签。该方法具有鲁棒性强的优点,但是由于其需要布置大量的标签作为参考标签,并且对其位置进行离线标定,实施较为困难。
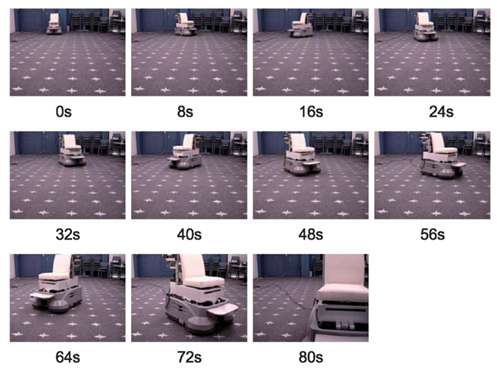
图2 基于参考标签法的RFID移动机器人导航
旋转天线法:在移动机器人上面安装有读写器及其天线,在环境总布置一个标签,并将其设定为目标标签。如图3所示,移动机器人上面的天线在不断地旋转,利用RSSI最大的信息,并结合三角定位原理,计算目标标签相对于移动机器人的位置信息,利用该相位位置信息对轨迹进行修正,使得机器人不断朝着目标标签运动。假如在机器人上面安装两个正交的旋转天线,那么该方法还具有一定的壁障能力。该方法需要特制的标签和天线,需要增加一个额外的旋转自由度,在实际使用过程中依然受限。
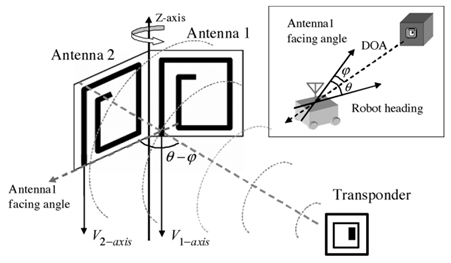
图3 基于双旋转天线的目标标签方向计算方法示意图
RSSI梯度法:同样在移动机器人上面安装两个读写器天线,利用两个天线所读取的RSSI的差值(称之为RSSI梯度)驱动移动机器人运动。如图4所示,该方法的原理是天线具有方向性,其射频方向图呈现叶形,在正对天线的方向上RSSI较大。当左侧的天线所获取的RSSI大于右侧时,目标标签位于机器人的左侧,那么控制机器人朝右修正方向,反之亦然。该方法实施方便,但是由于只对方向进行辨识,无法感知距离信息,故离实际的应用还有一段距离。
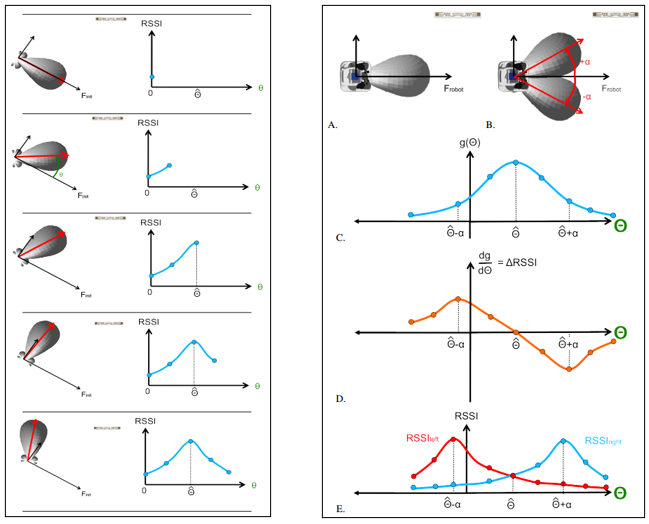
(a)RSSI与旋转角度的关系(b)双天线下RSSI的对比
图4 基于RSSI的标签方向估计原理示意图
模糊控制法:基于相位的RFID机器人导航方法较少,目前报道的主要有基于相位的模糊控制法。该方法在移动机器人上面安装两个天线,根据相位-距离的关系,可以很方便的计算目标标签相对于机器人的大致方向。进而利用模糊控制的思想,修正移动机器人的运动方向。该方法在实际应用中还需要考虑相位的模糊性以无区别的估计目标标签方位。
扫码关注我们
“智造苑”
秉承“先进制造、制造强国”的理念,
清华社为大家提供最好的知识服务!
最后
以上就是有魅力向日葵最近收集整理的关于两个点 定位_智造讲堂:RFID定位导航技术的全部内容,更多相关两个点内容请搜索靠谱客的其他文章。








发表评论 取消回复