Apollo项目介绍
阿波罗(Apollo)是百度发布的面向汽车行业及自动驾驶领域的合作伙伴提供的软件平台。发布时间是2017年4月19日,旨在向汽车行业及自动驾驶领域的合作伙伴提供一个开放、完整、安全的软件平台,帮助他们结合车辆和硬件系统,快速搭建一套属于自己的完整的自动驾驶系统。而将这个计划命名为“Apollo”计划,就是借用了阿波罗登月计划的含义。
阿波罗项目的官网地址如下:http://apollo.auto
在阿波罗项目的官网,介绍了该项目有如下特点:
开放能力:Apollo(阿波罗)是一个开放的、完整的、安全的平台,将帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套属于自己的自动驾驶系统。
共享资源、加速创新:Apollo开放平台,为你提供技术领先、覆盖广、高自动化的高精地图服务;全球唯一开放,拥有海量数据的仿真引擎;全球开放数据量第一,基于深度学习自动驾驶算法End-to-End。
持续共赢:Apollo开放平台,你可以更快地研发、测试和部署自动驾驶车辆。参与者越多,积累的行驶数据就越多。与封闭的系统相比,Apollo能以更快的速度成熟,让每个参与者得到更多的受益,同时Apollo平台也将在你的参与之下变得更好!
目前,其官网上列出的合作伙伴已经接近100家。
阿波罗项目的蓝图如下:
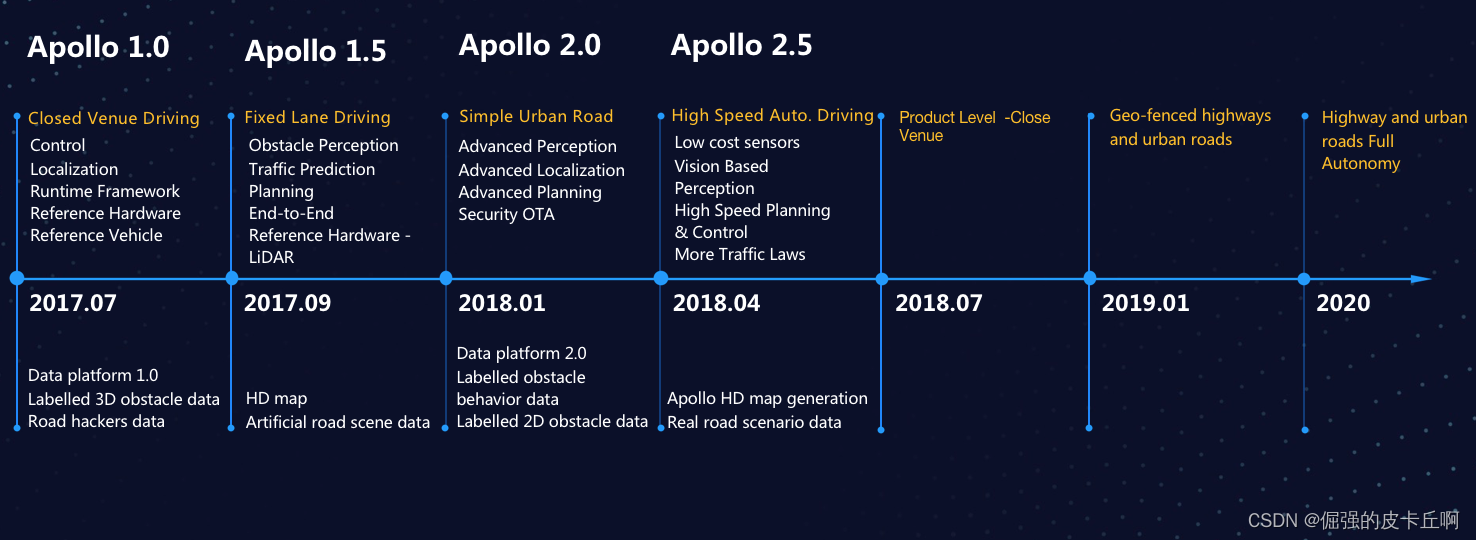
- 2017-07:封闭场地的自动驾驶能力
- 2017-12:在城市简单路况下的自动驾驶能力
- 2020-12:高速公路和普通城市道路上的全自动驾驶
最新发布的Apollo 2.5版本主要目标是L2级自动驾驶。
详细的Apollo版本演进信息如下图所示:
 阿布罗平台的开发包含下面几个步骤:
阿布罗平台的开发包含下面几个步骤:
-
了解离线模拟引擎Dreamviewer和ApolloAuto核心软件模块
(1)了解算法如何在汽车上运作
(2)不需要使用真正的汽车或硬件,就立即开始开发 -
核心模块集成
(1)Location模块
(2)Perception模块:(支持第三方解决方案,如基于Mobileye ES4芯片的摄像头,用于L2开发)处理来自Lidar的点云数据,并根据请求返回分段对象信息。
(3)Planning模块:计算微调路径,为路径服务的路径段提供汽车动态控制信息。
(4)Routine模块:通过Navigator接口查找路径段的本地实现。 -
高精地图。L4级别的自动驾驶需要高精地图。由于自动驾驶汽车需要在系统中重建3D世界,因此参考对象坐标在重新定位地图和现实世界中的自动驾驶方面发挥着重要作用。
-
基于云的在线仿真驱动场景引擎和数据中心。
(1)作为百度的合作伙伴,将被授予Docker证书来提交新图像并重播你在云上开发的算法。
(2)创建和管理复杂的场景以模拟真实世界的驾驶体验
自动驾驶的发展等级历史
L1——辅助驾驶
主要是纵向的对驾驶员进行辅助,例如车道偏离警告(LDW)、前碰预警(FCW)等,L1的车现在已经量产,很多汽车都带有碰撞预警系统。
L2——半自动驾驶
在L1的基础上又包含了横向的控制功能,通过车道控制系统、弯道行车系统等可以横向的辅助驾驶员行车,比如特斯拉的MODEL S。
L3——高度自动驾驶
是在某个特定的驾驶境下由系统对车辆进行驾驶和监控,全程通过自动驾驶进行操纵。只有系统检测行车环境时发现系统无法应对的问题,才需要驾驶员进行处理。L3目前还未能实现量产。
L4——超高度自动驾驶
全程都是由自动驾驶系统操纵。但有需要的话,驾驶员可以接管控制。
L5——全自动驾驶
可以在每个驾驶场景中(不局限与特定场景)完全自主驾驶。
最后
以上就是激情流沙最近收集整理的关于百度Apollo自动驾驶平台及自动驾驶等级的全部内容,更多相关百度Apollo自动驾驶平台及自动驾驶等级内容请搜索靠谱客的其他文章。








发表评论 取消回复