Toggle navigation
首页
AI资讯
科技
互联网
博客
下载
会员
中心
会员中心
发布资讯
发布博文
发布资源
首页
文章中心
Ardupilot
Ardupilot源码分析(二)
336 阅读
0 评论
222 点赞
我是
靠谱客
的博主
感性树叶
,这篇文章主要介绍
Ardupilot源码分析(二)
,现在分享给大家,希望可以做个参考。
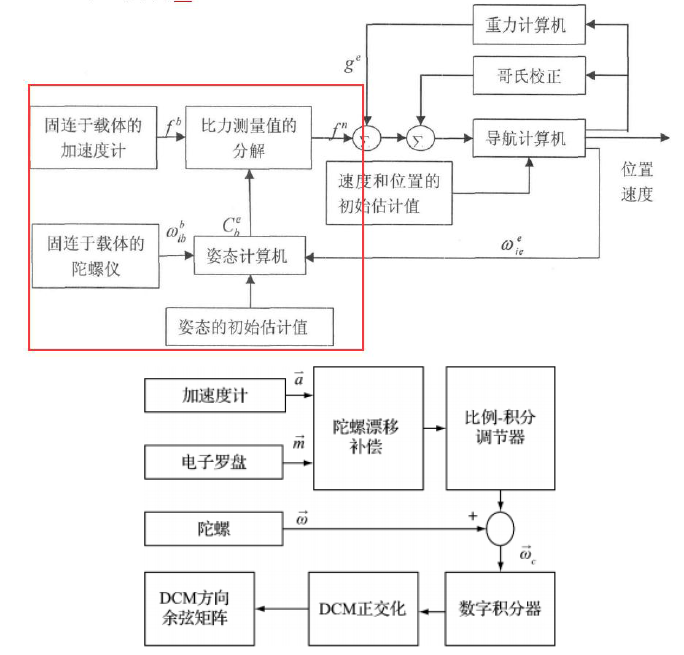
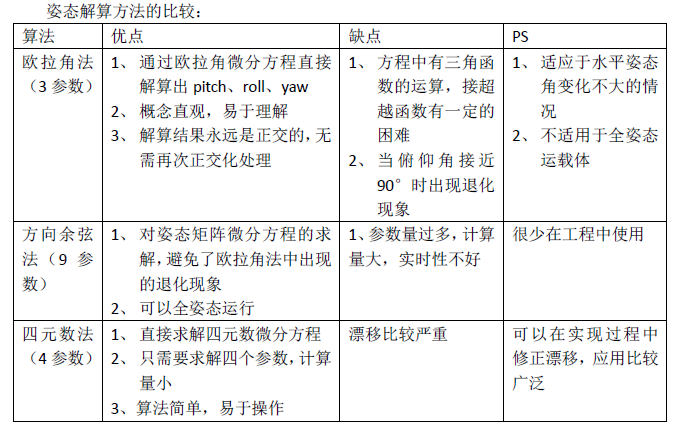
姿态解算基本流程
最后
以上就是
感性树叶
最近收集整理的关于
Ardupilot源码分析(二)
的全部内容,更多相关
Ardupilot源码分析(二)
内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。
点赞(
222
)
本文分类:
Ardupilot
浏览次数:
336
次浏览
发布日期:2024-05-02 15:35:01
相关文章
STM32 GPS悬停飞控 (十八)洞洞板飞控 脱控悬停
ardupiolt AP_AHRS库类的分析(一)AP_AHRS_NavEKF
PX4源码分析13:Ubuntu18.04中用V3命令编译v1.10.0Firmware时遇到问题一、遇到如下问题:二、一种可能的解决方案init.py源码备份(必要时恢复)
使用c++的成员指针实现类似Borland VCL组件的事件回调
Ardupilot源码分析(二)
Ardupilot 源码笔记(1)Sketch 例程代码
Mission Planner初学者安装调试教程指南(APM或PIX飞控)2——安装与更新
Mission Planner安卓安装包
评论列表
共有
0
条评论
发表评论
取消回复
登录
注册新账号
立即
投稿
返回
顶部








发表评论 取消回复