前言
大恒网口相机真的有点坑,api很难用,还好技术支持比较有耐心,一点一点的帮着解决了问题。
驱动安装
首先去大恒官网去下载linux下面的驱动,除了C++版本,还有python版本。一定要注意:linux下面安装驱动时,要看自己的内核版本支不支持相机的驱动,这一点很坑,要问清楚,到后面,也是费了很大劲才更换的内核。

 这是我这个相机驱动支持的linux内核,然后,安装驱动即可。
这是我这个相机驱动支持的linux内核,然后,安装驱动即可。
安装完驱动后,在tools文件夹中,有一个可执行文件,可以用来监测网口,运行即可。除此之外,还有一个可视化界面GalaxyView。
搭建工程
编译完成的文件夹有一些例子,拿下图第一个例子为例,在QT中建立工程。
 在QT中配置好路径,包括头文件和库文件。
在QT中配置好路径,包括头文件和库文件。
INCLUDEPATH += /home/oliver/software/dhcam_install_20181107/dh_camera/daheng-sdk-x64/sdk/include
LIBS += /home/oliver/software/dhcam_install_20181107/dh_camera/daheng-sdk-x64/sdk/lib/libdximageproc.so.1.0.1602.8161
/home/oliver/software/dhcam_install_20181107/dh_camera/daheng-sdk-x64/sdk/lib/libgxgvtl.so.1.0.1802.8051
/home/oliver/software/dhcam_install_20181107/dh_camera/daheng-sdk-x64/sdk/lib/libgxiapi.so.1.0.1810.8121
/home/oliver/software/dhcam_install_20181107/dh_camera/daheng-sdk-x64/sdk/lib/libgxu3vtl.so.1.0.1802.8051
INCLUDEPATH += /usr/local/include
/usr/local/include/opencv
/usr/local/include/opencv2
LIBS += /usr/local/lib/libopencv_*.so
对源文件进行修改,修改的内容主要在void ProcGetImage(void pParam)函数中,还有定义char* m_rgb_image=NULL,下面有标注。
//-------------------------------------------------------------
/**
file GxAcquireContinuous.cpp
brief sample to show how to acquire image continuously.
version 1.0.1605.9041
date 2016-05-04
*/
//-------------------------------------------------------------
#include "GxIAPI.h"
#include"DxImageProc.h"
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <iostream>
#include<sstream>
#include<fstream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
using namespace cv::dnn;
#define MEMORY_ALLOT_ERROR -1
char* m_rgb_image=NULL; //增加的内容
GX_DEV_HANDLE g_device = NULL; ///< 设备句柄
GX_FRAME_DATA g_frame_data = { 0 }; ///< 采集图像参数
pthread_t g_acquire_thread = 0; ///< 采集线程ID
bool g_get_image = false; ///< 采集线程是否结束的标志:true 运行;false 退出
//获取图像大小并申请图像数据空间
int PreForImage();
//释放资源
int UnPreForImage();
//采集线程函数
void *ProcGetImage(void* param);
//获取错误信息描述
void GetErrorString(GX_STATUS error_status);
int main()
{
uid_t user = 0;
user = geteuid();
if(user != 0)
{
printf("n");
printf("Please run this application with 'sudo -E ./GxAcquireContinuous' or"
" Start with root !n");
printf("n");
return 0;
}
printf("n");
printf("-------------------------------------------------------------n");
printf("sample to show how to acquire image continuously.n");
#ifdef __x86_64__
printf("version: 1.0.1605.8041n");
#elif __i386__
printf("version: 1.0.1605.9041n");
#endif
printf("-------------------------------------------------------------n");
printf("n");
printf("Press [x] or [X] and then press [Enter] to Exit the Programn");
printf("Initializing......");
printf("nn");
usleep(2000000);
//API接口函数返回值
GX_STATUS status = GX_STATUS_SUCCESS;
uint32_t device_num = 0;
uint32_t ret = 0;
GX_OPEN_PARAM open_param;
//初始化设备打开参数,默认打开序号为1的设备
open_param.accessMode = GX_ACCESS_EXCLUSIVE;
open_param.openMode = GX_OPEN_INDEX;
open_param.pszContent = "1";
//初始化库
status = GXInitLib();
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
return 0;
}
//获取枚举设备个数
status = GXUpdateDeviceList(&device_num, 1000);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
status = GXCloseLib();
return 0;
}
if(device_num <= 0)
{
printf("<No device>n");
status = GXCloseLib();
return 0;
}
else
{
//默认打开第1个设备
status = GXOpenDevice(&open_param, &g_device);
if(status == GX_STATUS_SUCCESS)
{
printf("<Open device success>n");
}
else
{
printf("<Open device fail>n");
status = GXCloseLib();
return 0;
}
}
//设置采集模式为连续采集
status = GXSetEnum(g_device, GX_ENUM_ACQUISITION_MODE, GX_ACQ_MODE_CONTINUOUS);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
status = GXCloseDevice(g_device);
if(g_device != NULL)
{
g_device = NULL;
}
status = GXCloseLib();
return 0;
}
//设置触发开关为OFF
status = GXSetEnum(g_device, GX_ENUM_TRIGGER_MODE, GX_TRIGGER_MODE_OFF);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
status = GXCloseDevice(g_device);
if(g_device != NULL)
{
g_device = NULL;
}
status = GXCloseLib();
return 0;
}
//为采集做准备
ret = PreForImage();
if(ret != 0)
{
printf("<Failed to prepare for acquire image>n");
status = GXCloseDevice(g_device);
if(g_device != NULL)
{
g_device = NULL;
}
status = GXCloseLib();
return 0;
}
//启动接收线程
ret = pthread_create(&g_acquire_thread, 0, ProcGetImage, 0);
if(ret != 0)
{
printf("<Failed to create the collection thread>n");
status = GXCloseDevice(g_device);
if(g_device != NULL)
{
g_device = NULL;
}
status = GXCloseLib();
return 0;
}
bool run = true;
while(run == true)
{
int c = getchar();
switch(c)
{
//退出程序
case 'X':
case 'x':
run = false;
break;
default:
break;
}
}
//为停止采集做准备
ret = UnPreForImage();
if(ret != 0)
{
status = GXCloseDevice(g_device);
if(g_device != NULL)
{
g_device = NULL;
}
status = GXCloseLib();
return 0;
}
//关闭设备
status = GXCloseDevice(g_device);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
if(g_device != NULL)
{
g_device = NULL;
}
status = GXCloseLib();
return 0;
}
//释放库
status = GXCloseLib();
return 0;
}
//-------------------------------------------------
/**
brief 获取图像大小并申请图像数据空间
return void
*/
//-------------------------------------------------
int PreForImage()
{
GX_STATUS status = GX_STATUS_SUCCESS;
int64_t payload_size = 0;
status = GXGetInt(g_device, GX_INT_PAYLOAD_SIZE, &payload_size);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
return status;
}
g_frame_data.pImgBuf = malloc(payload_size);
if(g_frame_data.pImgBuf == NULL)
{
printf("<Failed to allot memory>n");
return MEMORY_ALLOT_ERROR;
}
return 0;
}
//-------------------------------------------------
/**
brief 释放资源
return void
*/
//-------------------------------------------------
int UnPreForImage()
{
GX_STATUS status = GX_STATUS_SUCCESS;
uint32_t ret = 0;
//发送停采命令
status = GXSendCommand(g_device, GX_COMMAND_ACQUISITION_STOP);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
return status;
}
g_get_image = false;
ret = pthread_join(g_acquire_thread,NULL);
if(ret != 0)
{
printf("<Failed to release resources>n");
return ret;
}
//释放buffer
if(g_frame_data.pImgBuf != NULL)
{
free(g_frame_data.pImgBuf);
g_frame_data.pImgBuf = NULL;
}
return 0;
}
//-------------------------------------------------
/**
brief 采集线程函数
param pParam 线程传入参数
return void*
*/
//-------------------------------------------------
void *ProcGetImage(void* pParam)
{
GX_STATUS status = GX_STATUS_SUCCESS;
//接收线程启动标志
g_get_image = true;
//发送开采命令
status = GXSendCommand(g_device, GX_COMMAND_ACQUISITION_START);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
}
while(g_get_image)
{
if(g_frame_data.pImgBuf == NULL)
{
continue;
}
status = GXGetImage(g_device, &g_frame_data, 100);
if(status == GX_STATUS_SUCCESS)
{
if(g_frame_data.nStatus == 0)
{
//增加的内容
Mat src;
m_rgb_image=new char[g_frame_data.nWidth*g_frame_data.nHeight*3];
src.create(g_frame_data.nHeight,g_frame_data.nWidth,CV_8UC3);
memcpy(src.data,g_frame_data.pImgBuf,g_frame_data.nWidth*g_frame_data.nHeight);
DxRaw8toRGB24(g_frame_data.pImgBuf,m_rgb_image,g_frame_data.nWidth, g_frame_data.nHeight,RAW2RGB_NEIGHBOUR,DX_PIXEL_COLOR_FILTER(BAYERBG),false);
memcpy(src.data,m_rgb_image,g_frame_data.nWidth*g_frame_data.nHeight*3);
namedWindow("test",0);
imshow("test",src);
waitKey(10);
//到这里增加结束
printf("<Successful acquisition : Width: %d Height: %d >n", g_frame_data.nWidth, g_frame_data.nHeight);
}
}
}
}
//----------------------------------------------------------------------------------
/**
brief 获取错误信息描述
param emErrorStatus 错误码
return void
*/
//----------------------------------------------------------------------------------
void GetErrorString(GX_STATUS error_status)
{
char *error_info = NULL;
size_t size = 0;
GX_STATUS status = GX_STATUS_SUCCESS;
// 获取错误描述信息长度
status = GXGetLastError(&error_status, NULL, &size);
if(status != GX_STATUS_SUCCESS)
{
GetErrorString(status);
return;
}
error_info = new char[size];
if (error_info == NULL)
{
printf("<Failed to allocate memory>n");
return ;
}
// 获取错误信息描述
status = GXGetLastError(&error_status, error_info, &size);
if (status != GX_STATUS_SUCCESS)
{
printf("<GXGetLastError call fail>n");
}
else
{
printf("%sn", (char*)error_info);
}
// 释放资源
if (error_info != NULL)
{
delete []error_info;
error_info = NULL;
}
}
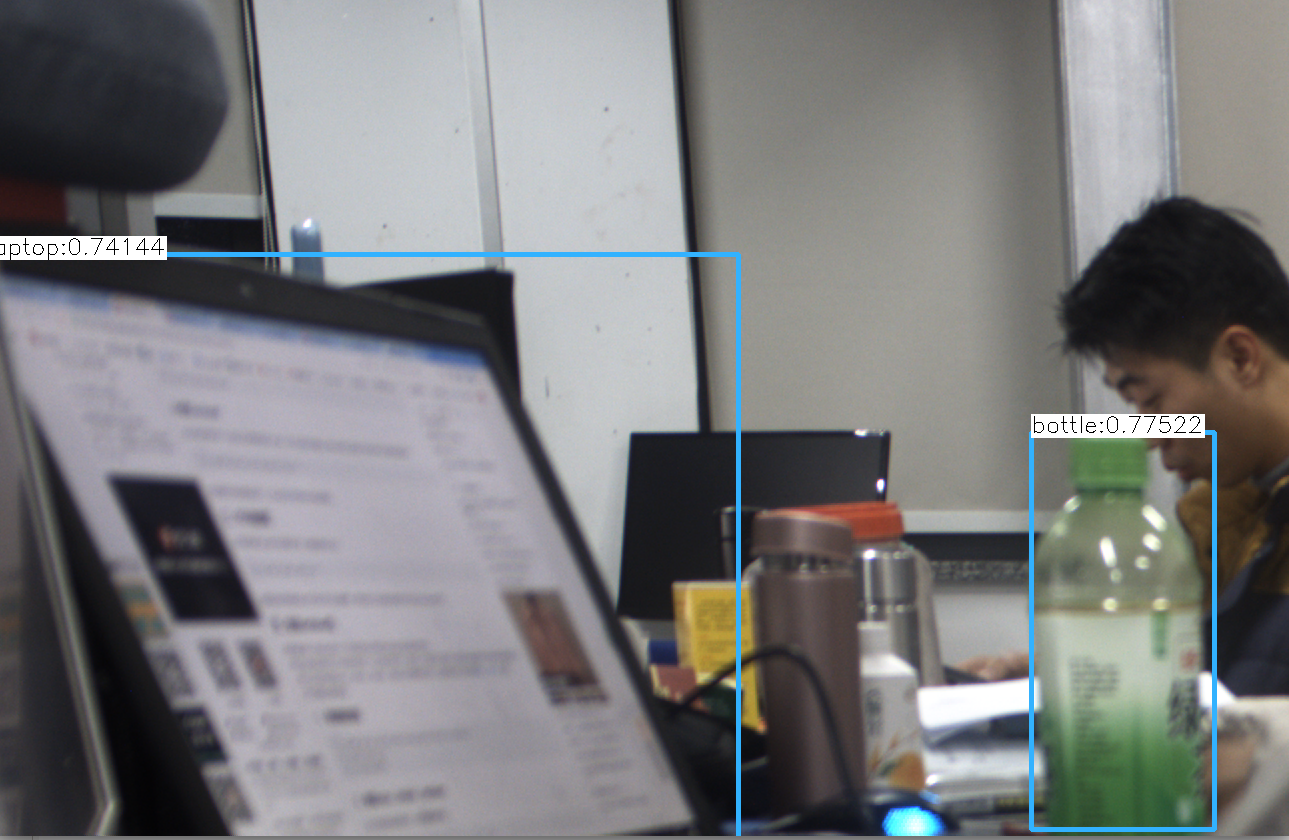
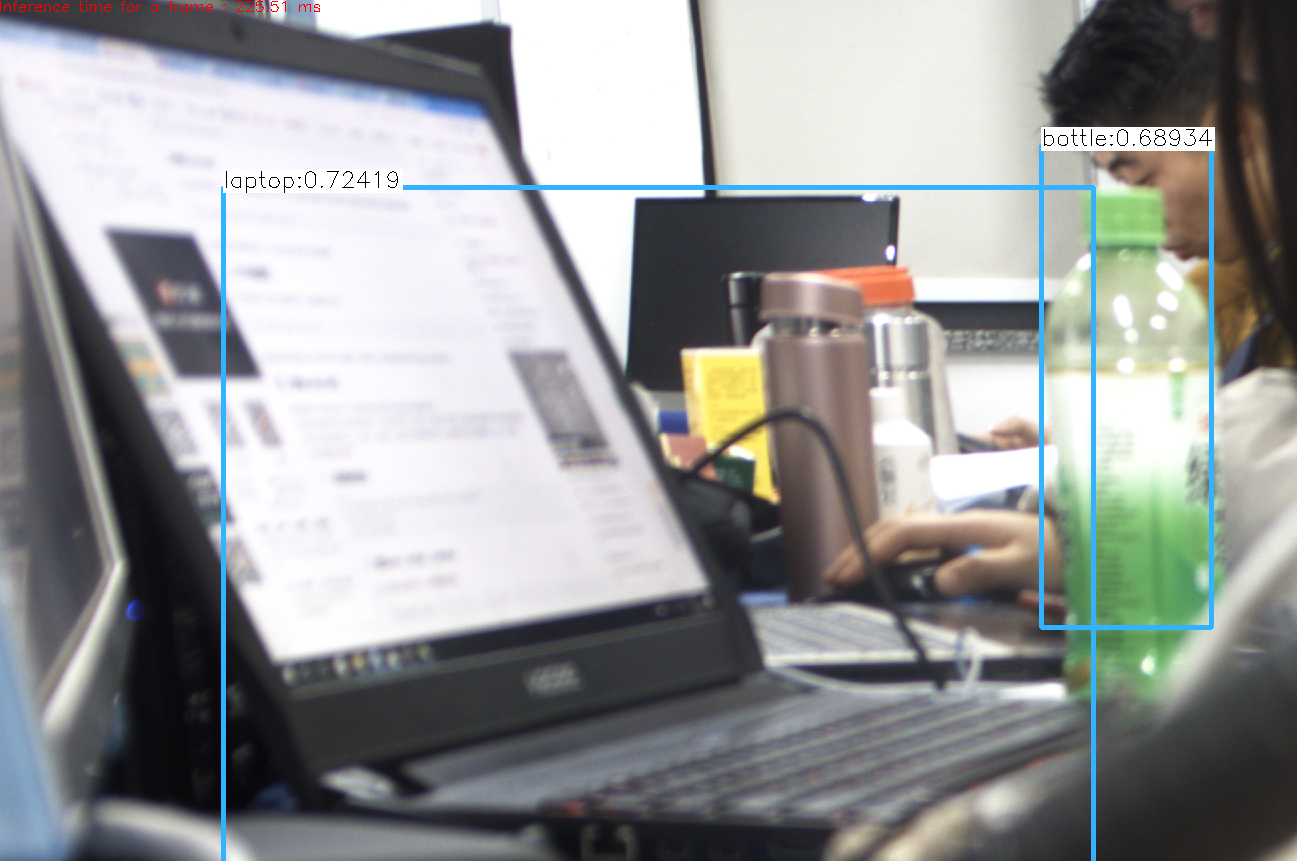
显示结果
最后
以上就是俏皮心锁最近收集整理的关于linux下使用opencv读取大恒相机的全部内容,更多相关linux下使用opencv读取大恒相机内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。


![[数据库]mysql5.7.21免安装版配置步骤(无my.ini文件或服务无法启动的解决方案)](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)





发表评论 取消回复