我是靠谱客的博主 文艺芒果,这篇文章主要介绍计算机视觉中的数学方法——6.7 多摄像机系统标定6.7.1 一维标定物6.7.2 确定仿射摄像机矩阵6.7.3 确定欧氏摄像机矩阵,现在分享给大家,希望可以做个参考。
6.7 多摄像机系统标定
- 6.7.1 一维标定物
- 6.7.2 确定仿射摄像机矩阵
- 为什么Pm和P1的表示不同?
- 6.7.3 确定欧氏摄像机矩阵
本节主要利用分层重构的思想给出一种多摄像机系统的标定方法:基于一维标定物的多摄像机系统的标定方法。多摄像机系统的标定通常出现在大场景视觉监控和大场景视觉测量等应用中。基于一维标定物标定的优点主要表现在:一维标定物的构造非常容易,在实际应用中可以利用一根杆上的三个以上的标志点构造一维标定物;所有摄像机能同时观察到整个标定物,这是为了提高标定精度在多摄像机系统标定时应满足条件,基于三维或二维标定物的标定方法因自遮挡而无法满足此条件。
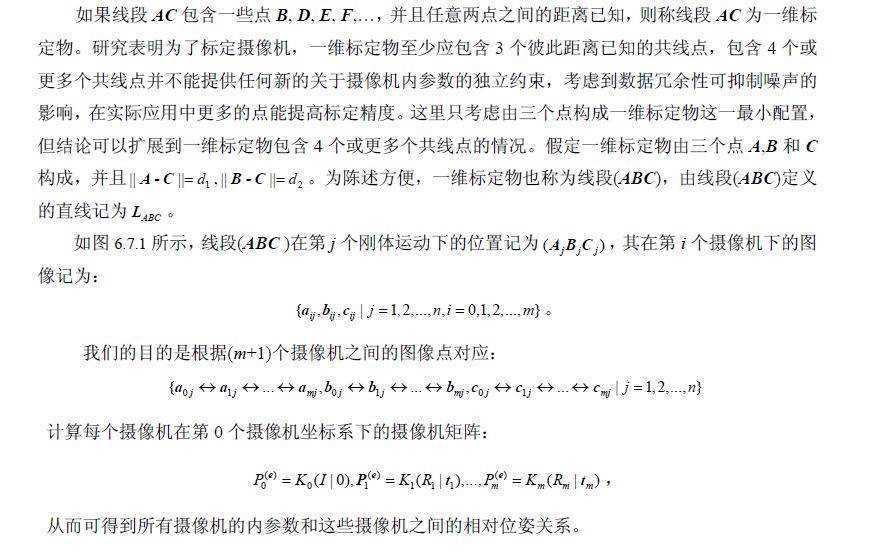
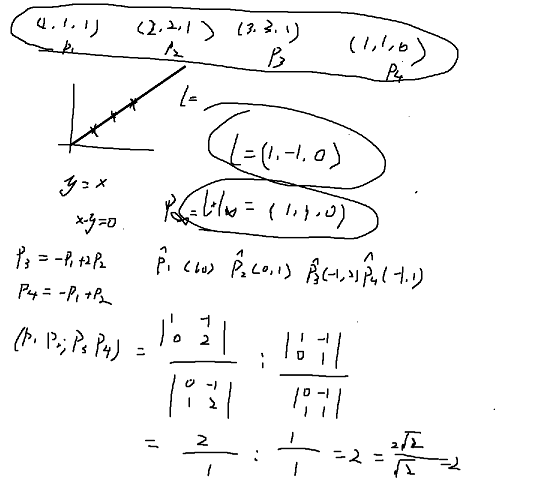
6.7.1 一维标定物
回顾:
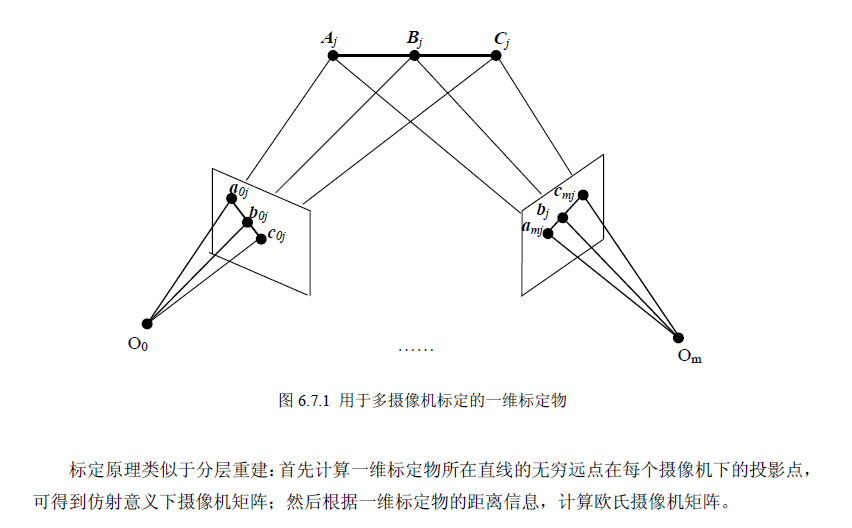
第j个刚体运动:改变了ABC在各个相机下的位置
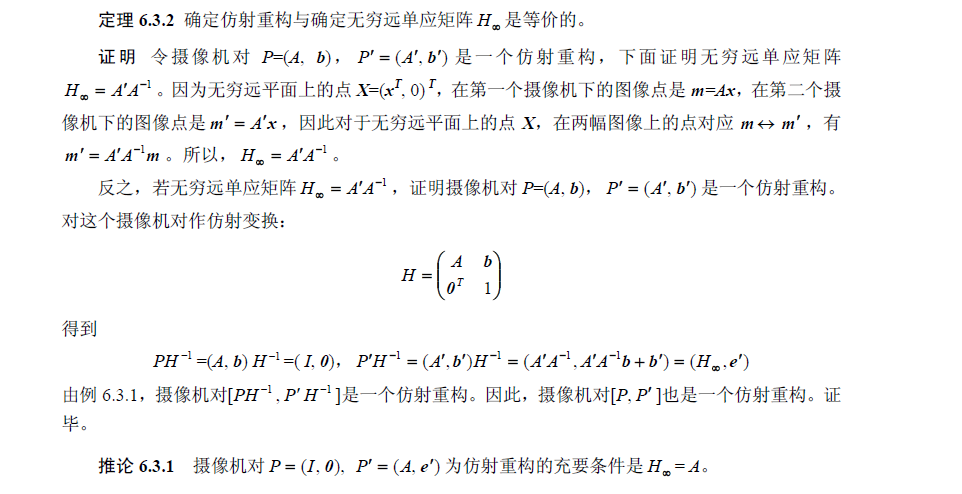
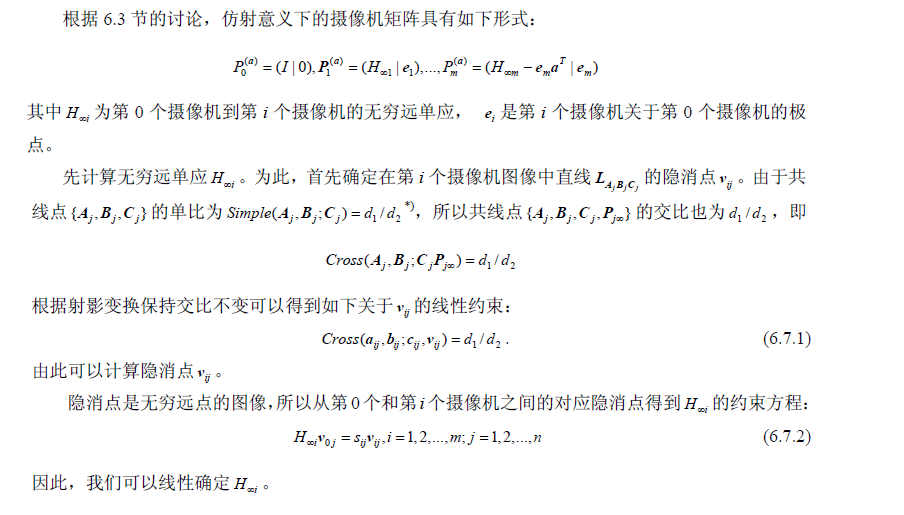
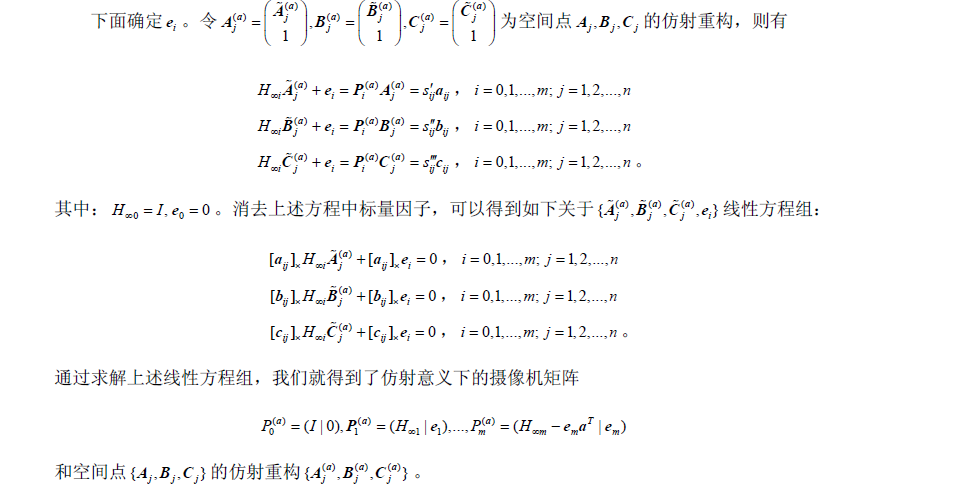
6.7.2 确定仿射摄像机矩阵
为什么Pm和P1的表示不同?

是0和1是典型摄像机对,而Pm则是非这个摄像机对的原因?
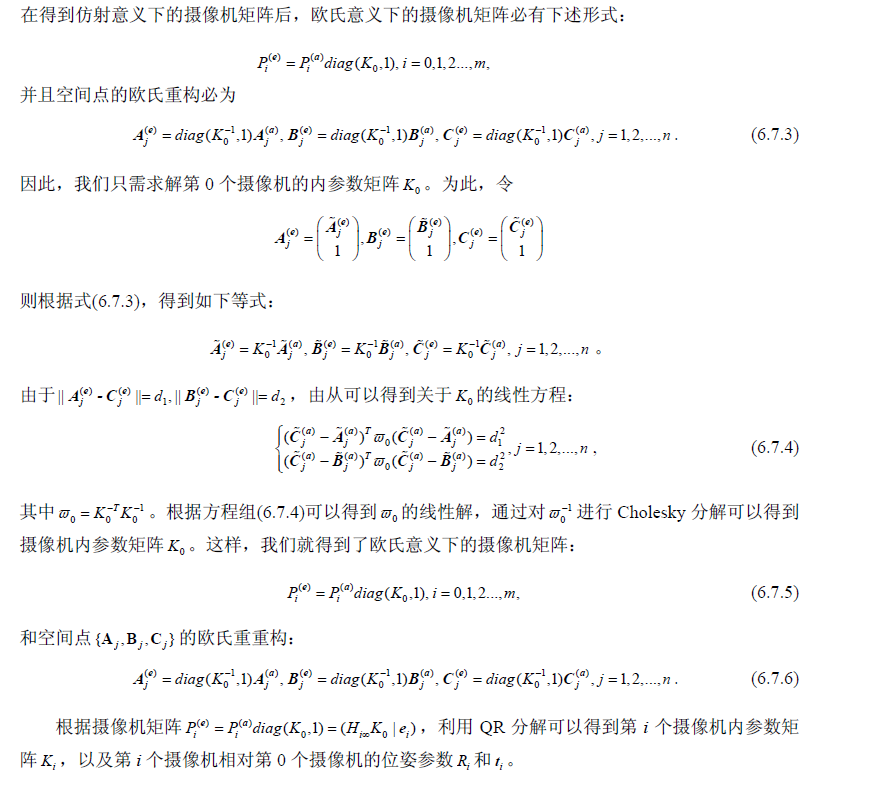
6.7.3 确定欧氏摄像机矩阵

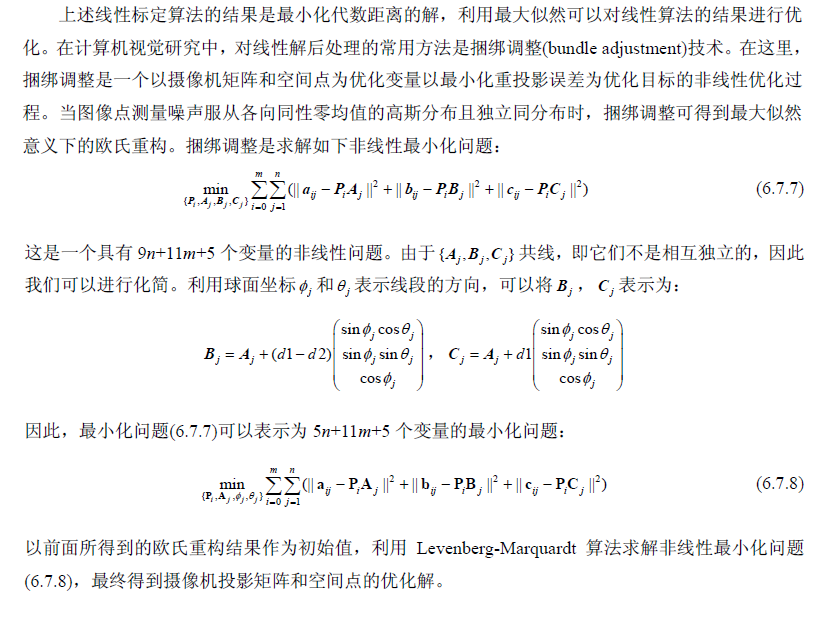
最后
以上就是文艺芒果最近收集整理的关于计算机视觉中的数学方法——6.7 多摄像机系统标定6.7.1 一维标定物6.7.2 确定仿射摄像机矩阵6.7.3 确定欧氏摄像机矩阵的全部内容,更多相关计算机视觉中的数学方法——6.7内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复