鱼眼摄像头SLAM
在机器人技术、摄影测量学和计算机视觉等领域,鲁棒相机位姿估计是许多视觉应用的核心。近年来,在复杂、大规模的室内外环境中,人们越来越关注相机位姿估计方法的实时性、通用性和可操作性。其中,相机的视场角起着重要的作用,特别是在具有挑战性的室内场景中,往往是通过鱼眼镜头或相机镜头组合来增加视场角。除了使用鱼眼相机增加视野外,还可以将多个相机进行刚性耦合,形成一个多相机系统,从而有效地利用冗余观测信息来保证位姿估计的鲁棒性和观测目标特征的长可见性。因此,搭载多鱼眼相机系统的自主定位与建图(Simultaneous Localization and Mapping,SLAM)可以捕获更丰富的环境特征信息,从而获得更鲁棒的位姿跟踪效果。
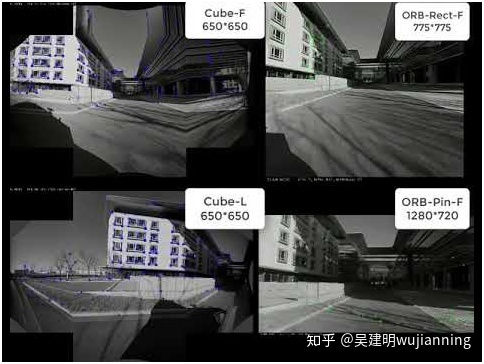
图1. 鱼眼摄像头SLAM示例
一种基于特征的同时定位和构图(SLAM)系统,用于从宽基线移动测图系统(MMS)的多鱼眼相机装置中获得的全景图像序列。
首先,鱼眼摄像机标定方法结合了等距投影模型和三角多项式,以实现从鱼眼摄像机到等效理想相机模型的高精度标定,从而保证了从鱼眼图像到相应全景图像的准确转换。
其次,我们开发了全景相机模型、具有特定反向传播误差函数的相应束调整以及线性姿态初始化算法。
第三,实现由初始化,特征匹配,帧跟踪和闭合环方面的几种特定策略和算法组成的基于特征的SLAM,以克服跟踪宽基线全景图像序列的困难。我们对超过15公里轨迹和14,000张全景图像的大型MMS数据集以及小型公共视频数据集进行了实验。我们的结果表明,
最后
以上就是灵巧八宝粥最近收集整理的关于多个摄像头组成全景拼接_鱼眼摄像头SLAM的全部内容,更多相关多个摄像头组成全景拼接_鱼眼摄像头SLAM内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复