http://www.cnblogs.com/qiangzi0221/p/7941896.html
准备工作:
ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz
1、安装ubuntu 16.04系统与安装ROS kinetic版本自行百度安装。一下链接可作为参考。
http://blog.csdn.net/weicao1990/article/details/52575314
2、在安装好ROS kinetic版本的ubuntu系统中, ctrl+art+t打开一个终端,安装turtlebot包,输入命令
sudo apt-get install ros-kinetic-turtlebot-*
3、安装可视化工具rviz
rosdep update
rosdep install rviz
rosmake rviz
运行rviz:
在一个终端中运行
roscore
在另一个终端中运行
rosrun rviz rviz
(记得先运行roscore,否则就会出现错误:could not contact ROS master)
4、安装arbotix模拟器
方法一:
sudo apt-get install ros-kinetic-arbotix-*
方法二:(使用git源码安装)
在ROS工作包caktkin_ws中的源码文件夹src中下载git源码

cd ~/catkin_ws/src
git clone https://github.com/vanadiumlabs/arbotix_ros.git cd ..
catkin_make
(ps:提示找不到ROS包错误,就去更新一下环境:source ~/catkin_ws/devel/setup.bash)
5、安装ROS-BY-EXAMPLE书配套的代码包rbx1
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git cd ..
catkin_make
ps:在安装rbx1之前,可以选择性的安装一些依赖包
选择机器人目的位置
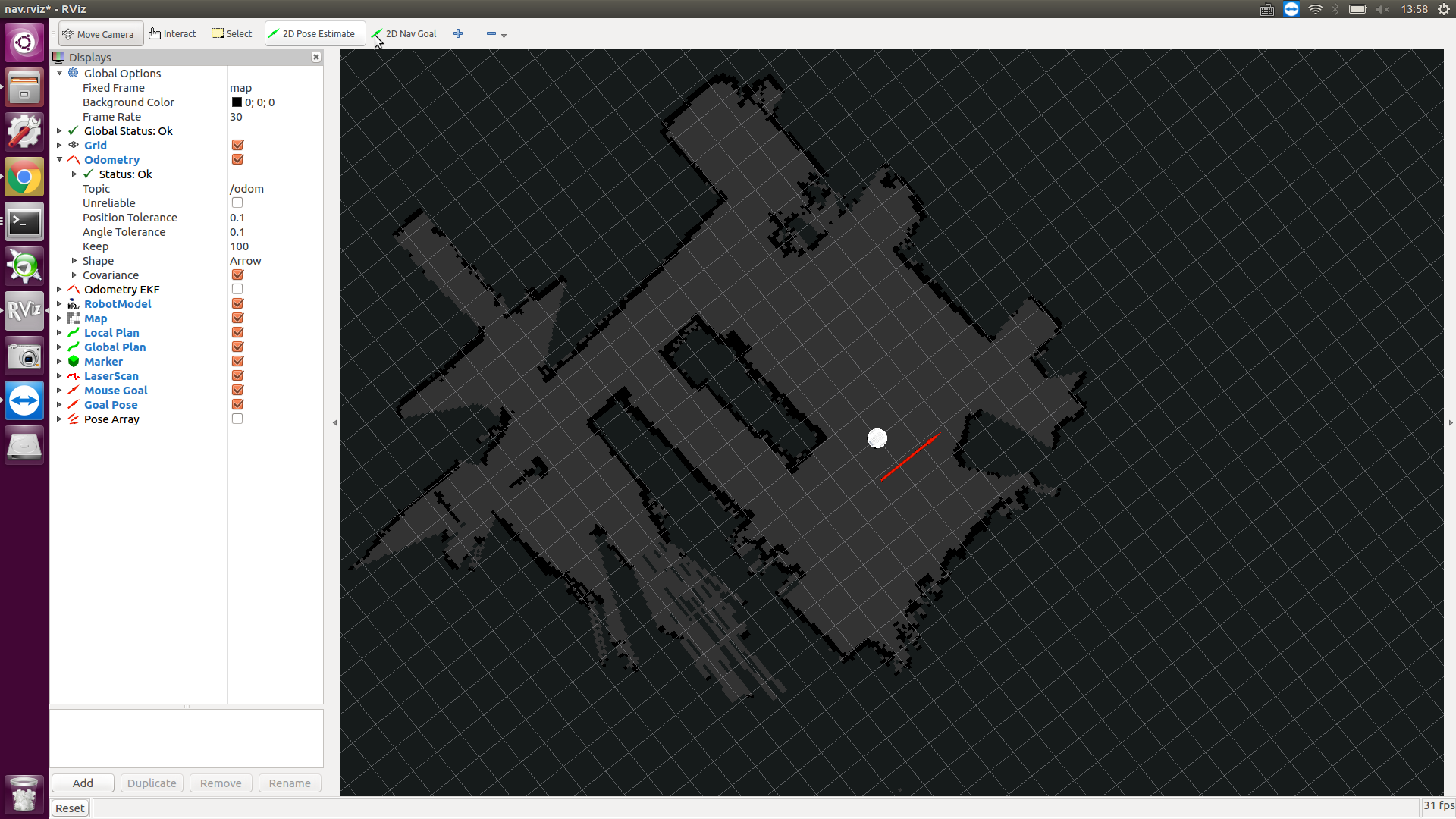
自动导航效果:
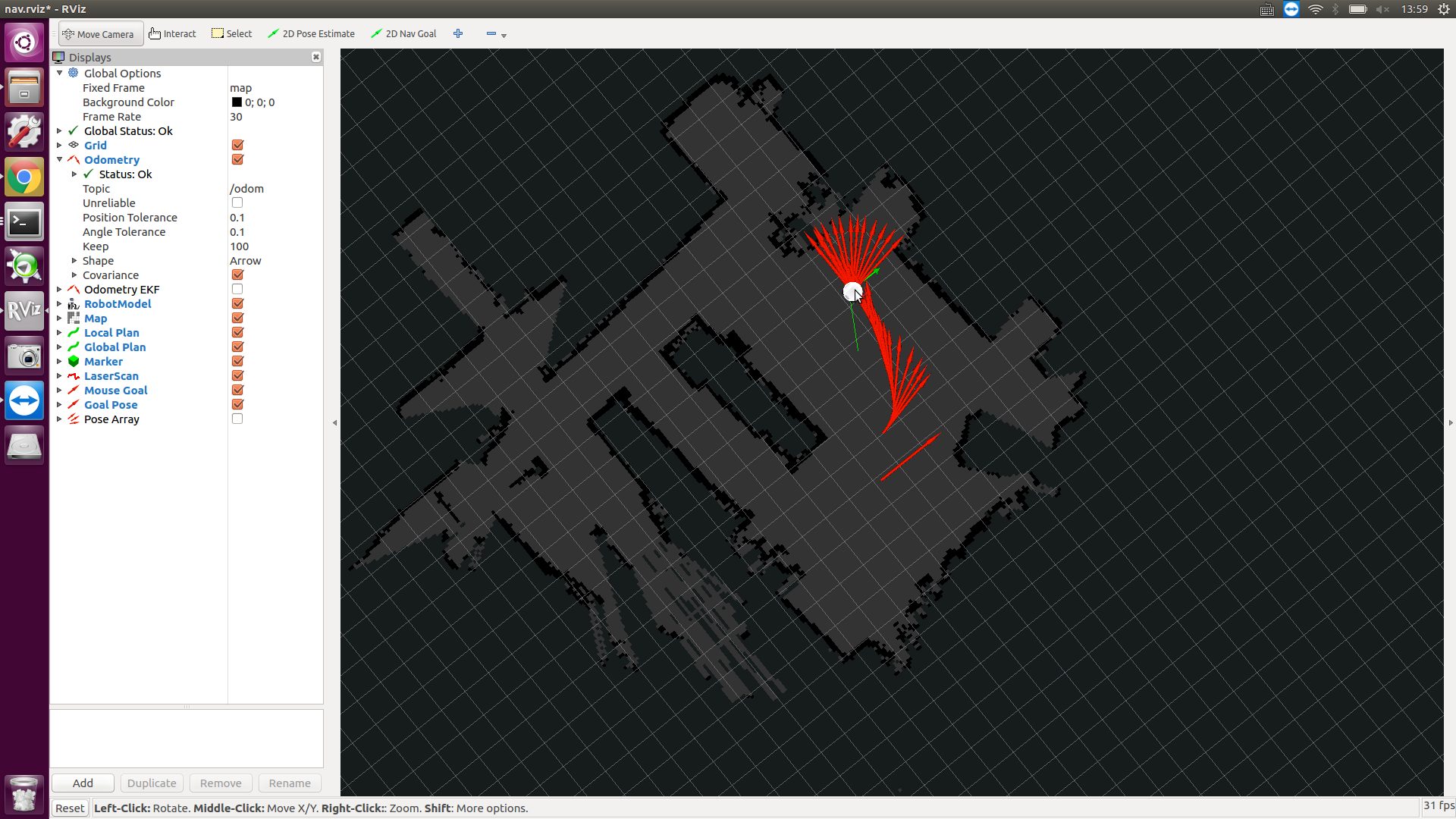
相关导航的原理可查询ros官网wiki
参考博客
最后
以上就是谨慎指甲油最近收集整理的关于android版本 igo无模拟导航,ROS机器人导航仿真(kinetic版本)的全部内容,更多相关android版本内容请搜索靠谱客的其他文章。








发表评论 取消回复