点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
前一篇文章《代码解读 | VINS 视觉前端》介绍了VINS前端。本文来说说鱼眼相机模型。
VINS_Mono代码支持的相机包括针孔模型和鱼眼模型相机,针孔模型大家都比较熟悉了,今天向大家介绍一种鱼眼相机模型——MEI模型。
相机模型
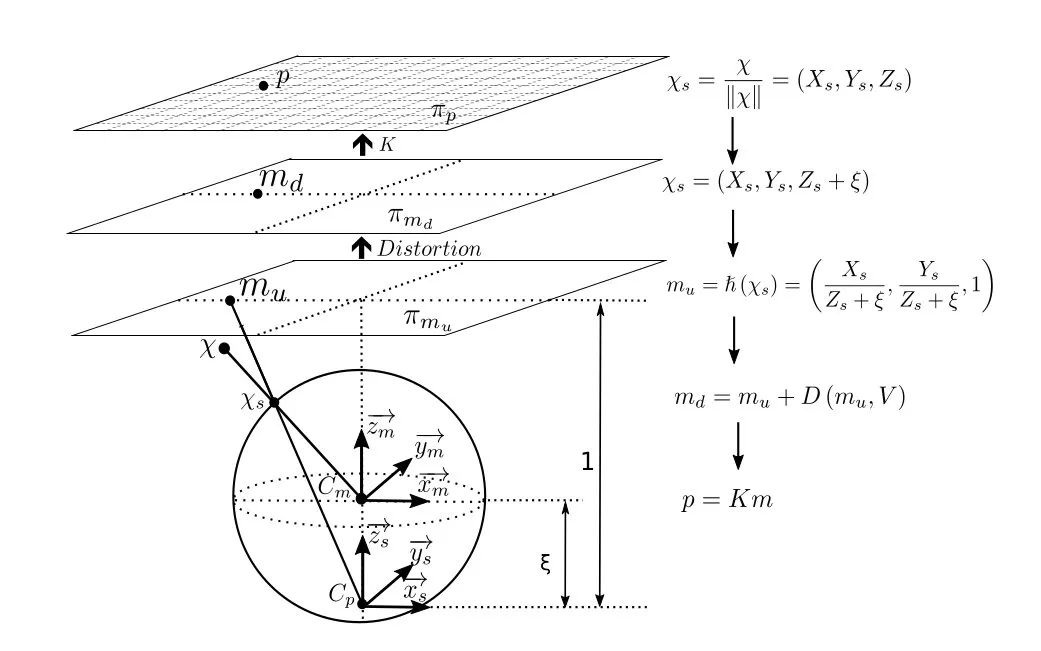
相比针孔模型可以将3d点直接投影到归一化平面,鱼眼相机则多了一个中间过程:先将3d点投影到单位球面,再将单位球面上的点投影到归一化平面上。废话不多说,请看鱼眼相机投影模型示意图:

代码解读
VINS_Mono中相机模型对应代码在
/VINS-Mono/camera_model/src/camera_models/CataCamera.cc
文件liftSphere()函数中,该函数是将2d投影到3
最后
以上就是高贵草莓最近收集整理的关于kwgt公式代码大全_代码解读 | VINS_Mono中的鱼眼相机模型的全部内容,更多相关kwgt公式代码大全_代码解读内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复