目录
一、理论基础
二、案例背景
1.问题描述
2.思路流程
三、部分MATLAB仿真
四、仿真结论分析
五、参考文献
一、理论基础
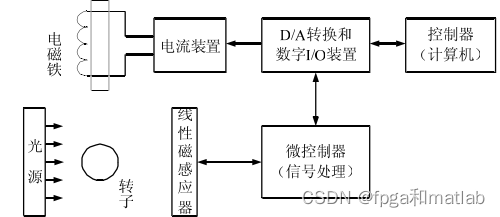
磁吸控制系统主要由铁心、线圈、传感器、控制器、功率放大器及其控制对象刚体等元件组成。系统结构如图1所示。
二、案例背景
1.问题描述
在磁悬浮的许多实际应用中,都要求磁悬浮系统的悬浮气隙有较大的工作范围。但由于磁悬浮力-电流-气隙之间的非线性特性,系统模型开环不稳定。至少需要输出反馈进行闭环控制,才能够实现稳定悬浮。为了设计一个性能良好的悬浮控制器,基于磁悬浮系统的稳定性控制问题受到了广泛而又深入的研究。传统工业控制中多采用成熟的PID控制调节器,其中比例环节可以加快系统反应速度,积分环节可以消除静差,调节系统刚度;微分环节可以调节系统阻尼特性,改善系统的动态品质。
PID调节器结构简单,调节方便,应用成熟。但是在高精度的磁悬浮技术场合,工况的复杂性和磁场本身的非线性使得传统PID控制器难以满足工程需要。对磁悬浮模型的稳定控制通常是将非线性磁悬浮模型在平衡点附近进行泰勒展开,忽略高阶项以后,便得到一阶线性化模型。这种线性化模型在磁悬浮控制中得到了广泛应用,并已在工程上验证了它的实用价值,但使用这种线性化方法设计的控制策略也有其局限性。由于线性化模型是在平衡点附近得到的,当系统的平衡点改变时,系统的动态特性会显著改变,控制策略将迅速恶化,影响系统稳定。此时,线性控制律往往不能满足系统稳定性的要求。为此需要更加先进的控制方法。近年来,随着工业水平的提高,很多先进控制方法涌现于自动化领域。
智能控制智能控制方法是指基于在线学习和辨识的控制方法,如模糊控制、神经网络控制等,此类方法的特点是被控系统可当作“黑箱”来处理,不需要任何有关的先验知识,控制器可根据输出响应来学习系统特性并根据需要对控制参数实施在线调节。此类方法的优点是能够克服磁浮非线性和外界干扰给系统造成的影响。然而,智能控制系统本身具有复杂性,尚处于实验研究阶段,并未得到成熟的工程运用。
系统辨识系统辨识就是利用系统观测到的信息,构造系统的数学模型的理论和方法。它涉及到的理论基础相当广泛,对于单变量线性系统,已经有一系列成功的理论和辨识方法,多变量系统中的研究还尚未成熟。然而,在单变量系统中与传统的控制方法相比并没有明显的优势。
随着控制方法的进步和系统要求的提高,控制手段应该在满足需求的同时,向提高系统稳定性、可靠性和经济性的方向发展,磁悬浮系统中先进控制方法的研究无疑成为磁悬浮领域中的一个热点。磁悬浮系统是一个典型的非线性系统,其非线性的特性是不可忽略的。然而当前绝大多数磁悬浮控制器都是基于非线性磁悬浮系统在某个平衡点的线性化模型而设计的线性控制律。当系统的平衡点改变时,系统的动态特性会显著改变,此时,线性控制律往往不能满足系统稳定性的要求。因此有必要基于磁悬浮系统的非线性模型设计控制律。无源性是基于耗散性的特例,是一种先进的非线性控制方法,它从能量的角度来描述系统的输入输出,可以把一些数学工具与物理现象联系起来,适用于很多控制问题,在机电系统,机器人等控制应用方面和自适应控制,非线性H∞控制等控制方法方面,已经证实了无源性是一种有效的方法。
2.思路流程
磁吸控制系统是学习和研究控制理论的重要平台之一。对磁吸系统的研究可以归结为对非线性系统和不稳定系统的研究,这类复杂控制对象难以用数学公式进行精确描述,采用经典控制方法也难取得好的控制效果。在MATLAB环境下利用S-函数建立磁悬浮的非线性动态模型。磁吸控制系统的物理分析及其数学模型的建立,从电磁学详细分析了系统的线性和非线性模型。磁吸系统的PID控制和模糊控制研究首先分析传统的PID控制器,针对PID控制器对非线性磁吸系统控制的局限性,运用模糊控制方法并通过实验进行比较。
三、部分MATLAB仿真
%m=0.1,g=9.82,R=5,L=0.04,k=0.01,h0=0.02
function y=MagLev
m=0.1;
g=9.82;
R=5;
L=0.04;
k=0.01;
h0=0.02;
i0=h0*sqrt(m*g/k);
A=[0 1 0;2*k*i0^2/(m*h0^3) 0 -2*k*i0/(m*h0^2);0 0 -R/L];
B=[0;0;1/L];
C=[1 0 0];
D=0;
y=ss(A,B,C,D)clc;
clear;
close all;
y=MagLev;
yy=pole(y);
PD=tf(-1*[1 20],[1 50]);
rlocus(PD*MagLev);
PI=tf([1 1],[1 0]);
[y,t]=impulse(feedback(150*PI*PD*MagLev,1));
sgrid;
figure(2);
plot(t,y)
grid;
v0=0.991;h0=0.02;
[num,den]=tfdata(150*PD*PI,'v');
simulink;
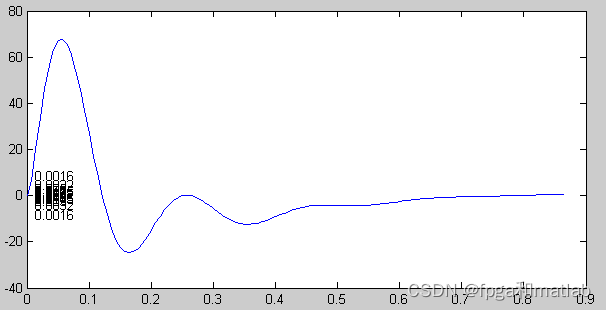
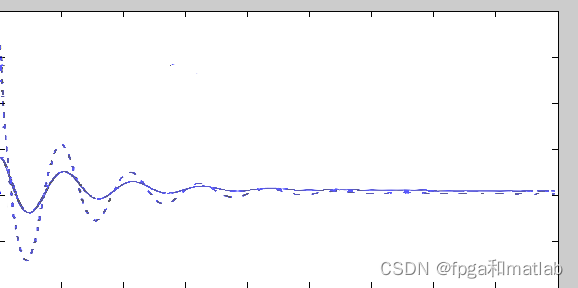
四、仿真结论分析
其仿真结果如下所示:
五、参考文献
[1]胡建平, 刘琦, 王奇瑞,等. 磁吸式精密播种器滚筒变速控制系统设计[J]. 中国农业机械学会;中国农业工程学会;中国农学会, 2009.A08-02
最后
以上就是震动海燕最近收集整理的关于磁吸系统的PID控制的matlab仿真一、理论基础二、案例背景三、部分MATLAB仿真四、仿真结论分析五、参考文献的全部内容,更多相关磁吸系统内容请搜索靠谱客的其他文章。



![[计算流体力学][Matlab] 使用 A,B,C 格式与蛙跳格式求解二维对流问题](https://www.shuijiaxian.com/files_image/reation/bcimg23.png)




发表评论 取消回复