小伙伴们有没有这样的经验:在上课10分钟前从寝室骑车飞奔向教学楼时,寝室到教学楼的路非常挤;而这个时候,如果有东西落在寝室,从教学楼往寝室飞奔时的车道却很空。换句话说,在一些场合,从点 i i i到点 j j j的行驶时间和从点 j j j到点 i i i的行驶时间是不同的。这个现象当然不会被学者们忽视。这就是我们今天要介绍的非对称类问题(asymmetric)。
非对称TSP与对称TSP
在我们以往介绍的TSP问题和VRP问题中,算例给出的通常是客户点的二维坐标,两点之间的距离通过欧拉距离(平方和开根号)计算,因此两点间不同向的边距离是相同的。因此,我们在设计算子时可以对一些边进行“翻转”,例如“1→2→3→4→5”翻转为“1→4→3→2→5”,这个时候由于距离的对称性,“2→3→4”与“4→3→2”两段路径的距离是相同的,不需要重新计算。但在我们今天介绍的非对称TSP问题中,由于反向后距离发生变化,这两段路径的距离将发生改变,这种去重优化的方法就失效了。
1983年学者Roy Jonker 和 Ton Volgenant 提出了一种将非对称TSP问题转换为对称TSP问题的方法。通过这种方法,我们可以将非对称TSP问题转化为对称TSP问题,然后使用适合对称问题的算法求解该问题,而不是重新设计算法。
转化方法
Roy和Ton通过扩充原问题graph的规模的方式,在新的graph上求解对称TSP问题,然后将新解转化为旧问题的解。
通过以下操作,将一个非对称TSP问题的距离矩阵 C C C转化为对称TSP问题的距离矩阵 C ~ tilde{C} C~( C ~ T = C ~ tilde{C}^T = tilde{C} C~T=C~):
- 令 C ˉ = C bar{C} = C Cˉ=C,其中 c ˉ i i = − M ( i ∈ N ) bar{c}_{i i}=-M(i in N) cˉii=−M(i∈N)。(M是一个很大的数,N为节点集合)
- 令 U U U为一个n维方阵,对 ∀ i , j ∈ N forall i, j in N ∀i,j∈N 令 u i j = ∞ u_{i j}=infty uij=∞
- 令 C ~ = [ U C ‾ T C ‾ U ] tilde{boldsymbol{C}}=left[begin{array}{ll}U & overline{boldsymbol{C}}^T \ overline{boldsymbol{C}} & boldsymbol{U}end{array}right] C~=[UCCTU]
得到的矩阵 C boldsymbol{C} C就是新的对称TSP问题的距离矩阵。可以看出,这个矩阵是一个2n*2n规模的方阵,新的节点集为 { 1 , 2 , … , n , n + 1 , … , 2 n } {1,2, ldots, n, n+1, ldots, 2 n} {1,2,…,n,n+1,…,2n}。
求解这个新的TSP问题得到的最优解必定是以下形式(或其对称形式):
i 1 → ( i 1 + n ) → i 2 → ( i 2 + n ) → ⋯ → i n → ( i n + n ) → i 1 i_{1} rightarrowleft(i_{1}+nright) rightarrow i_{2} rightarrowleft(i_{2}+nright) rightarrow cdots rightarrow i_{n} rightarrowleft(i_{n}+nright) rightarrow i_{1} i1→(i1+n)→i2→(i2+n)→⋯→in→(in+n)→i1
其中 i k ∈ N i_{k} in N ik∈N。
也就是说,新问题的最优解中,每一个节点必定指向到它对应的拓展出的节点,而每一个新的节点必定指向原先图中的某个节点。该解对应的原问题的最优解即为:
i 1 → i 2 → ⋯ → i n → i 1 i_{1} rightarrow i_{2} rightarrow cdots rightarrow i_{n} rightarrow i_{1} i1→i2→⋯→in→i1
深入理解
看了前文的转化方法,是不是感觉特别简单呢?只需要通过一些简单的矩阵操作得到新的距离矩阵,路径的转化也非常简单,只需要取奇数位的节点编号即可。
在原论文中作者提出一个定理:新问题的最优解必定对应一个原问题的最优解,并没有给出完整证明。事实上转化的思维也很简单,这里小编给大家文字证明一下。
在矩阵操作的第一步得到 C ˉ = C bar{C} = C Cˉ=C的过程中, c ˉ i i = − M bar{c}_{i i}=-M cˉii=−M在新矩阵 C boldsymbol{C} C中实际上对应了节点 i k i_{k} ik和 i k + n i_{k} +n ik+n。所以在新问题的最优解中,必须尽可能多的包含 i k → ( i k + n ) i_{k} rightarrowleft(i_{k}+nright) ik→(ik+n)这类边。由于一个节点只能访问一次,所以这类边最多存在n条。由于矩阵 U U U的每一个数都是无穷大,因此不存在 ( i k 1 + n ) → ( i k 2 + n ) left(i_{k1}+nright) rightarrowleft(i_{k2}+nright) (ik1+n)→(ik2+n)以及 i k 1 → i k 2 i_{k1} rightarrow i_{k2} ik1→ik2这两种边,因此新解中剩下的边只能是 ( i k 1 + n ) → i k 2 left(i_{k1}+nright) rightarrow i_{k2} (ik1+n)→ik2的形式了。
由于 ( i k 1 + n ) → i k 2 left(i_{k1}+nright) rightarrow i_{k2} (ik1+n)→ik2的距离与 i k 1 → i k 2 i_{k1} rightarrow i_{k2} ik1→ik2的距离相等,并且每个新问题最优解中必定存在n条距离为-M的边,因此新的目标函数相当于原问题的目标函数减去一个常数(n*M),因此原问题与新问题等价。
小编解释的可能有点绕,不过原理并不复杂,相信同学们能够思考清楚。
代码分享
为了验证方法的准确性,小编基于干货 | JAVA调用cplex求解一个TSP模型详解中的TSP模型代码编写了将非对称TSP问题转化对称TSP问题进行求解的代码。(代码下载见文末)事实上,上述文章提到的模型不需要改动也可以作为非对称TSP问题的模型,只需要修改输入为矩阵形式,一样可以求解。小编简单测试了“直接通过模型求解”和“转化为对称问题通过模型求解”两种形式,验证转化方法的正确性:
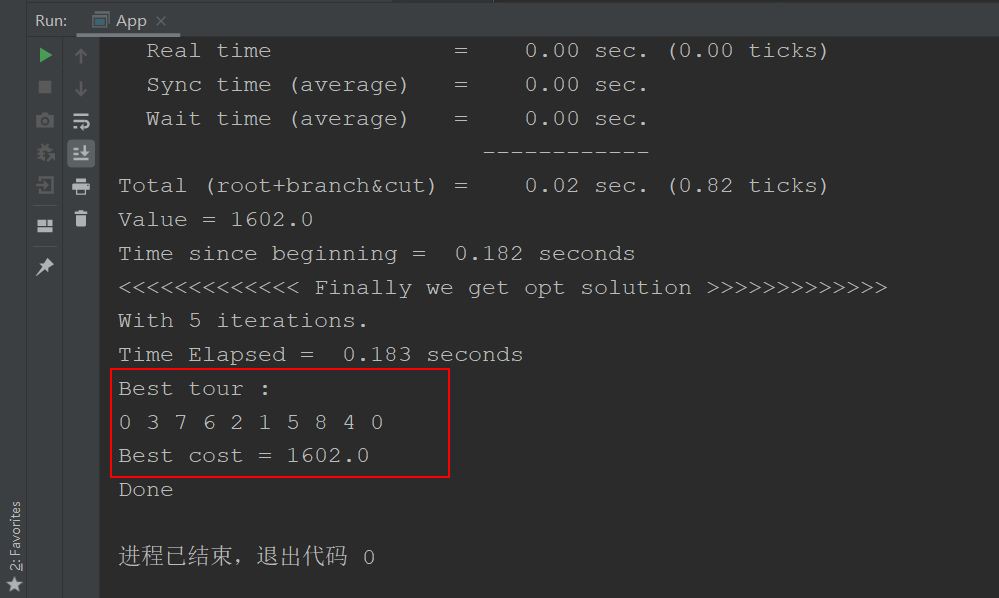
直接求解模型结果:
转化为对称问题求解模型结果:
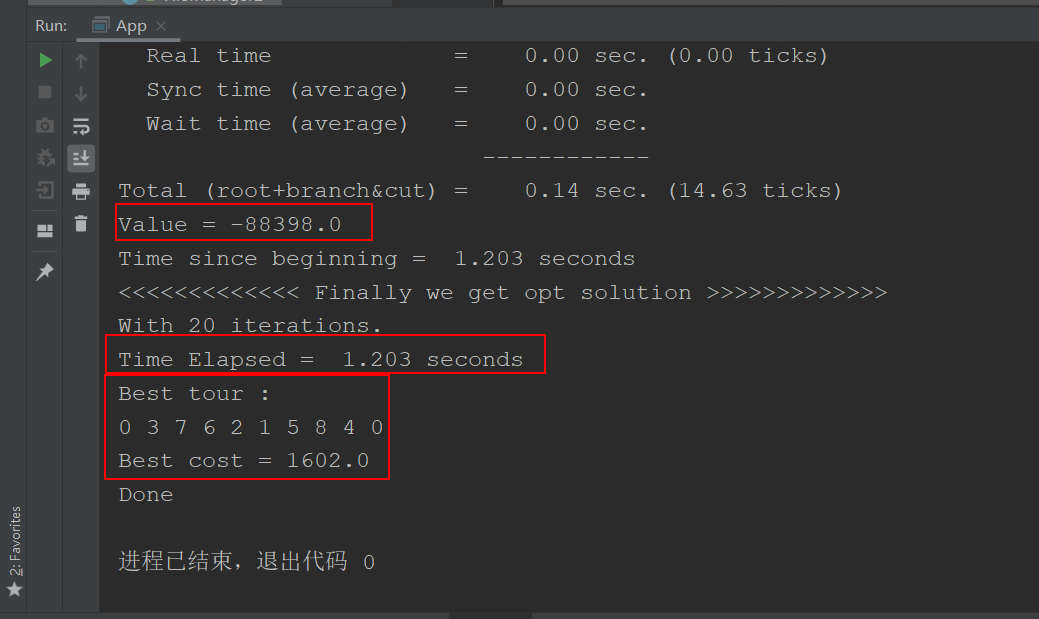
可以看到,对于测试算例(9个节点的小算例),两种方法得到的路径是一模一样的。下图中可以看到,新模型的目标值是-88398.0,正好等于9*(-10000)+1602.0 (M=10000),这与我们之前的推理也吻合。由于转化后问题的节点规模为原来的两倍,相应的算法时间消耗也扩大了很多(0.183s到1.203s)。
先提醒一下,如果问题存在不止一个最优解,可能两次得到的路径会不一样哦,小伙伴们自己测试时遇到了可别骂小编弄错了。
结语
自此,非对称TSP问题转化为对称TSP问题的方法已经介绍完了。值得一提的是,原作者1983年的论文还提出了一种针对局部非对称TSP问题(也就是部分节点距离不对称,部分对称)的转化方法,不需要增大节点规模到2n。可惜的是,该方法后来被证明有误,新解的结果只能作为原问题最优解的下界,作者在1986年的论文中承认了自己的错误。看来学术研究即使暂时被承认,也一样要经受时间的考验啊!
小编在查阅文献也时发现,较新的关于非对称问题的研究更多是直接设计对应算法,很少关于非对称TSP问题转对称的研究。或许是因为本文提到的方法已经相当经典,比较难有改进了吧。
参考文献:
- Jonker, R., & Volgenant, T. (1986). Transforming asymmetric into symmetric traveling salesman problems: erratum. Operations Research Letters, 5(4), 215-216.
- Jonker, R., & Volgenant, T. (1983). Transforming asymmetric into symmetric traveling salesman problems. Operations Research Letters, 2(4), 161-163.
代码下载:
关注公众号【数据魔术师】,在公众号内输入【ATSP】
或访问github:https://github.com/zll-hust/ATSP
即可获得本文代码文献!
最后
以上就是健壮篮球最近收集整理的关于非对称TSP问题(asymmetric travelling salesman problem)与对称TSP问题的转换的全部内容,更多相关非对称TSP问题(asymmetric内容请搜索靠谱客的其他文章。








发表评论 取消回复