原理
基础矩阵
(1)
X
1
T
F
X
2
=
0
X_1^TFX_2=0tag{1}
X1TFX2=0(1)
X
1
X1
X1与
X
2
X2
X2是两幅图像的一对匹配点,
F
F
F为基础矩阵,基础矩阵为一幅图像上像
p
1
p_1
p1点到另一幅图像上对极线
L
2
L_2
L2的一种映射。所以有如下公式:
(2)
L
2
=
F
∗
p
1
L_2=F*p_1tag{2}
L2=F∗p1(2)
此公式为后面
r
a
n
s
a
c
ransac
ransac算法需要用到。
基础矩阵F是一个3×3的矩阵,总共有9个未知元素。然而,上面的公式中使用的齐次坐标,齐次坐标在相差一个常数因子下是相等,
F
F
F也就只有8个未知元素,也就是说,只需要8对匹配的点对就可以求解出两视图的基础矩阵
F
F
F。下面介绍下8点法
E
i
g
h
t
−
P
o
i
n
t
−
A
l
g
o
r
i
t
h
m
Eight -Point -Algorithm
Eight−Point−Algorithm计算基础矩阵的过程。假设在两幅图像对应匹配点的坐标分别为:
X
1
=
(
x
1
,
y
1
,
1
)
T
X_1=(x_1,y_1,1)^T
X1=(x1,y1,1)T,
X
2
=
(
x
2
,
y
2
,
1
)
T
X_2=(x_2,y_2,1)^T
X2=(x2,y2,1)T,那么由基础矩阵公式得:
(3)
[
x
1
y
1
1
]
[
f
11
f
12
f
13
f
21
f
22
f
23
f
31
f
32
f
33
]
[
x
2
y
2
1
]
=
0
left[ begin{matrix} x_1 & y_1 & 1 end{matrix} right] left[ begin{matrix} f_{11} & f_{12} & f_{13} \ f_{21} & f_{22} & f_{23} \ f_{31} & f_{32} & f_{33} end{matrix} right] left[ begin{matrix} x_2 \ y_2 \ 1 end{matrix} right] tag{3}=0
[x1y11]⎣⎡f11f21f31f12f22f32f13f23f33⎦⎤⎣⎡x2y21⎦⎤=0(3)
也即:
(4)
x
2
x
1
f
11
+
x
2
y
1
f
12
+
x
2
f
13
+
y
2
x
1
f
21
+
y
2
y
1
f
22
+
y
2
f
23
+
x
1
f
31
+
y
2
f
32
+
f
33
=
0
x_2x_1f_{11}+x_2y_1f_{12}+x_2f_{13}+y_2x_1f_{21}+y_2y_1f_{22}+y_2f_{23}+x_1f_{31}+y_2f_{32}+f_{33}=0tag{4}
x2x1f11+x2y1f12+x2f13+y2x1f21+y2y1f22+y2f23+x1f31+y2f32+f33=0(4)
将上述公式中的F看成列向量:
(5)
F
=
[
f
11
f
12
f
13
f
21
f
22
f
23
f
31
f
32
f
33
]
F= left[ begin{matrix} f_{11} & f_{12} & f_{13} f_{21} & f_{22} & f_{23} f_{31} & f_{32} & f_{33} end{matrix} right] tag{5}
F=[f11f12f13f21f22f23f31f32f33](5)
那么可将上述公式改写为:
(6)
[
x
2
x
1
x
2
y
1
x
2
y
2
x
1
y
2
y
1
y
2
x
1
y
2
1
]
F
=
0
left[ begin{matrix} x_2x_1 & x_2y_1 & x_2 & y_2x_1 & y_2y_1 & y_2 & x_1 & y_2 & 1 end{matrix} right] F=0tag{6}
[x2x1x2y1x2y2x1y2y1y2x1y21]F=0(6)
给定8组点的集合,我们有如下方程:
(7)
[
x
2
1
x
1
1
x
2
1
y
1
1
x
2
1
y
2
1
x
1
1
y
2
1
y
1
1
y
2
1
x
1
1
y
2
1
1
x
2
2
x
1
2
x
2
2
y
1
2
x
2
2
y
2
2
x
1
2
y
2
2
y
1
2
y
2
2
x
1
2
y
2
2
1
x
2
3
x
1
3
x
2
3
y
1
3
x
2
3
y
2
3
x
1
3
y
2
3
y
1
3
y
2
3
x
1
3
y
2
3
1
x
2
4
x
1
4
x
2
4
y
1
4
x
2
4
y
2
4
x
1
4
y
2
4
y
1
4
y
2
4
x
1
4
y
2
4
1
x
2
5
x
1
5
x
2
5
y
1
5
x
2
5
y
2
5
x
1
5
y
2
5
y
1
5
y
2
5
x
1
5
y
2
5
1
x
2
6
x
1
6
x
2
6
y
1
6
x
2
6
y
2
6
x
1
6
y
2
6
y
1
6
y
2
6
x
1
6
y
2
6
1
x
2
7
x
1
7
x
2
7
y
1
7
x
2
7
y
2
7
x
1
7
y
2
7
y
1
7
y
2
7
x
1
7
y
2
7
1
x
2
8
x
1
8
x
2
8
y
1
8
x
2
8
y
2
8
x
1
8
y
2
8
y
1
8
y
2
8
x
1
8
y
2
8
1
]
[
f
11
f
12
f
13
f
21
f
22
f
23
f
31
f
32
f
33
]
=
0
left[ begin{matrix} x_2^1x_1^1 & x_2^1y_1^1 & x_2 ^1& y_2^1x_1^1 & y_2^1y_1^1 & y_2^1 & x_1^1 & y_2^1 & 1\ x_2^2x_1^2 & x_2^2y_1^2 & x_2^2 & y_2^2x_1^2 & y_2^2y_1^2 & y_2^2 & x_1^2 & y_2^2 & 1\ x_2^3x_1^3 & x_2^3y_1^3 & x_2^3 & y_2^3x_1^3 & y_2^3y_1^3 & y_2^3 & x_1^3 & y_2^3 & 1\ x_2^4x_1^4 & x_2^4y_1^4 & x_2 ^4& y_2^4x_1^4 & y_2^4y_1^4 & y_2^4 & x_1^4 & y_2 ^4& 1\ x_2^5x_1^5 & x_2^5y_1^5 & x_2^5 & y_2^5x_1^5 & y_2^5y_1^5 & y_2^5 & x_1^5 & y_2^5 & 1\ x_2^6x_1^6 & x_2^6y_1^6 & x_2^6 & y_2^6x_1^6 & y_2^6y_1^6 & y_2^6 & x_1^6 & y_2^6 & 1\ x_2^7x_1^7 & x_2^7y_1^7 & x_2^7 & y_2^7x_1^7 & y_2^7y_1^7 & y_2^7 & x_1^7 & y_2^7 & 1\ x_2^8x_1^8 & x_2^8y_1^8 & x_2^8 & y_2^8x_1^8 & y_2^8y_1^8 & y_2^8 & x_1^8 & y_2^8 & 1 end{matrix} right] left[ begin{matrix} f_{11} \ f_{12} \ f_{13} \ f_{21} \ f_{22} \ f_{23} \ f_{31} \ f_{32} \ f_{33} end{matrix} right] =0tag{7}
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡x21x11x22x12x23x13x24x14x25x15x26x16x27x17x28x18x21y11x22y12x23y13x24y14x25y15x26y16x27y17x28y18x21x22x23x24x25x26x27x28y21x11y22x12y23x13y24x14y25x15y26x16y27x17y28x18y21y11y22y12y23y13y24y14y25y15y26y16y27y17y28y18y21y22y23y24y25y26y27y28x11x12x13x14x15x16x17x18y21y22y23y24y25y26y27y2811111111⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡f11f12f13f21f22f23f31f32f33⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤=0(7)
求解上述方程的就可以解矩阵F的各个系数,这里选择用
S
V
D
SVD
SVD算法求解,但是由于噪声、错误匹配点等因素影响,可能导致
(
7
)
(7)
(7)公式求解得到的基础矩阵不稳定,所以基于此选择
r
a
n
s
a
c
ransac
ransac算法对其进行改进得到最优的F矩阵。
RANSAC算法
RANSAC算法的基本假设是样本中包含正确数据(inliers,可以被模型描述的数据),也包含异常数据(outliers,偏离正常范围很远、无法适应数学模型的数据),即数据集中含有噪声。这些异常数据可能是由于错误的测量、错误的假设、错误的计算等产生的。同时RANSAC也假设,给定一组正确的数据,存在可以计算出符合这些数据的模型参数的方法。
算法的基本假设是:
- 数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
- “局外点”是不能适应该模型的数据;
- 除此之外的数据属于噪声。
- 局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC基本思想描述如下:
- 考虑一个最小抽样集的势为n的模型(n为初始化模型参数所需的最小样本数)和一个样本集P,集合P的样本数#§>n,从P中随机抽取包含n个样本的P的子集S初始化模型M;
- 余集 S C = P S SC= {P over S} SC=SP中与模型M的误差小于某一设定阈值t的样本集以及S构成S*。S*认为是内点集,它们构成S的一致集(Consensus Set);
- 若#(S*)≥N,认为得到正确的模型参数,并利用集S*(内点inliers)采用最小二乘等方法重新计算新的模型M*;重新随机抽取新的S,重复以上过程。
- 在完成一定的抽样次数后,若未找到一致集则算法失败,否则选取抽样后得到的最大一致集判断内外点,算法结束。
RANSAC的优点
- 能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数。
RANSAC的缺点:
- 计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。
- 要求设置跟问题相关的阀值。而且RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
RANSAC用于剔除错误匹配的算法流程:
- 从匹配的点对中选择8个点,使用归一化8点法估算出基础矩阵 F F F
- 计算其余的点对到其对应对极线的距离 d p d_p dp,如果 d p ≤ d d_p≤d dp≤d则该点为内点,否则为外点。记下符合该条件的内点的个数为 n u m num num
- 迭代k次,或者某次得到内点的数目 n u m num num占有的比例大于等于95%,则停止。选择 n u m num num最大的基础矩阵作为最终的结果。
代码现实
此函数为八点法实现, x 1 、 x 2 x1、x2 x1、x2为匹配点集合,8点法传入的x1,x2分别为对应的8对匹配点,此处为实现公式7的过程,求解线性方程组的解使用的 S V D SVD SVD(奇异值分解)算法, S V D SVD SVD算法为机器学习的一种算法,具体原理可以网上搜索资料。U,S,V分别为计算得到的左奇异值、奇异值、右奇异值。
def compute_fundamental(x1, x2):
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
A = np.zeros((n, 9))
for i in range(n):
A[i] = [x1[0, i] * x2[0, i], x1[0, i] * x2[1, i], x1[0, i] * x2[2, i],
x1[1, i] * x2[0, i], x1[1, i] * x2[1, i], x1[1, i] * x2[2, i],
x1[2, i] * x2[0, i], x1[2, i] * x2[1, i], x1[2, i] * x2[2, i]]
U, S, V = np.linalg.svd(A)
F = V[-1].reshape(3, 3)
U, S, V = np.linalg.svd(F)
S[2] = 0
F = np.dot(U, np.dot(np.diag(S), V))
return F / F[2, 2]
此处为将匹配点进行归一化处理。
def compute_fundamental_normalized(x1, x2):
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# normalize image coordinates
x1 = x1 / x1[2]
mean_1 = np.mean(x1[:2], axis=1)
S1 = np.sqrt(2) / np.std(x1[:2])
T1 = np.array([[S1, 0, -S1 * mean_1[0]], [0, S1, -S1 * mean_1[1]], [0, 0, 1]])
x1 = np.dot(T1, x1)
x2 = x2 / x2[2]
mean_2 = np.mean(x2[:2], axis=1)
S2 = np.sqrt(2) / np.std(x2[:2])
T2 = np.array([[S2, 0, -S2 * mean_2[0]], [0, S2, -S2 * mean_2[1]], [0, 0, 1]])
x2 = np.dot(T2, x2)
# compute F with the normalized coordinates
F = compute_fundamental(x1, x2)
# print (F)
# reverse normalization
F = np.dot(T1.T, np.dot(F, T2))
return F / F[2, 2]
随机选择8对匹配点,用于计算基础矩阵。
def randSeed(good, num = 8):
'''
:param good: 初始的匹配点对
:param num: 选择随机选取的点对数量
:return: 8个点对list
'''
eight_point = random.sample(good, num)
return eight_point
计算匹配点对的坐标,注意返回坐标为 ( x , y ) (x,y) (x,y)形式,所以此处增加了一个维度使得返回的为 ( x , y , 1 ) (x,y,1) (x,y,1)的形式,与前述公式对应。
def PointCoordinates(eight_points, keypoints1, keypoints2):
'''
:param eight_points: 随机八点
:param keypoints1: 点坐标
:param keypoints2: 点坐标
:return:8个点
'''
x1 = []
x2 = []
tuple_dim = (1.,)
for i in eight_points:
tuple_x1 = keypoints1[i[0].queryIdx].pt + tuple_dim
tuple_x2 = keypoints2[i[0].trainIdx].pt + tuple_dim
x1.append(tuple_x1)
x2.append(tuple_x2)
return np.array(x1, dtype=float), np.array(x2, dtype=float)
此处为ransac算法计算匹配点与对极线的距离,由公式 ( 2 ) (2) (2)以及8点法计算得到的F可以计算出对极线的表达式,其中 L = [ a , b , c ] L=[a,b,c] L=[a,b,c]对极线的方向向量为[-b,a],所以此处计算距离利用的是点到向量的距离计算公式 d = ∣ a × b ∣ a d={|atimes b| over a} d=a∣a×b∣,具体公式原理自行百度。
def inlier(F,good, keypoints1,keypoints2,confidence):
num = 0
ransac_good = []
x1, x2 = PointCoordinates(good, keypoints1, keypoints2)
for i in range(len(x2)):
line = F.dot(x1[i].T)
#在对极几何中极线表达式为[A B C],Ax+By+C=0, 方向向量可以表示为[-B,A]
line_v = np.array([-line[1], line[0]])
err = h = np.linalg.norm(np.cross(x2[i,:2], line_v)/np.linalg.norm(line_v))
# err = computeReprojError(x1[i], x2[i], F)
if abs(err) < confidence:
ransac_good.append(good[i])
num += 1
return num, ransac_good
此函数为ransac算法实现, 从匹配的点对中选择8个点,使用归一化8点法估算出基础矩阵
F
F
F
计算其余的点对到其对应对极线的距离
d
p
d_p
dp,如果
d
p
≤
d
d_p≤d
dp≤d则该点为内点,否则为外点。记下符合该条件的内点的个数为
n
u
m
num
num迭代k次,或者某次得到内点的数目
n
u
m
num
num占有的比例大于等于95%,则停止。选择
n
u
m
num
num最大的基础矩阵作为最终的结果。保存最优的结果。
def ransac(good, keypoints1, keypoints2, confidence,iter_num):
Max_num = 0
good_F = np.zeros([3,3])
inlier_points = []
for i in range(iter_num):
eight_points = randSeed(good)
x1,x2 = PointCoordinates(eight_points, keypoints1, keypoints2)
F = compute_fundamental_normalized(x1.T, x2.T)
num, ransac_good = inlier(F, good, keypoints1, keypoints2, confidence)
if num > Max_num:
Max_num = num
good_F = F
inlier_points = ransac_good
print(Max_num, good_F)
return Max_num, good_F, inlier_points
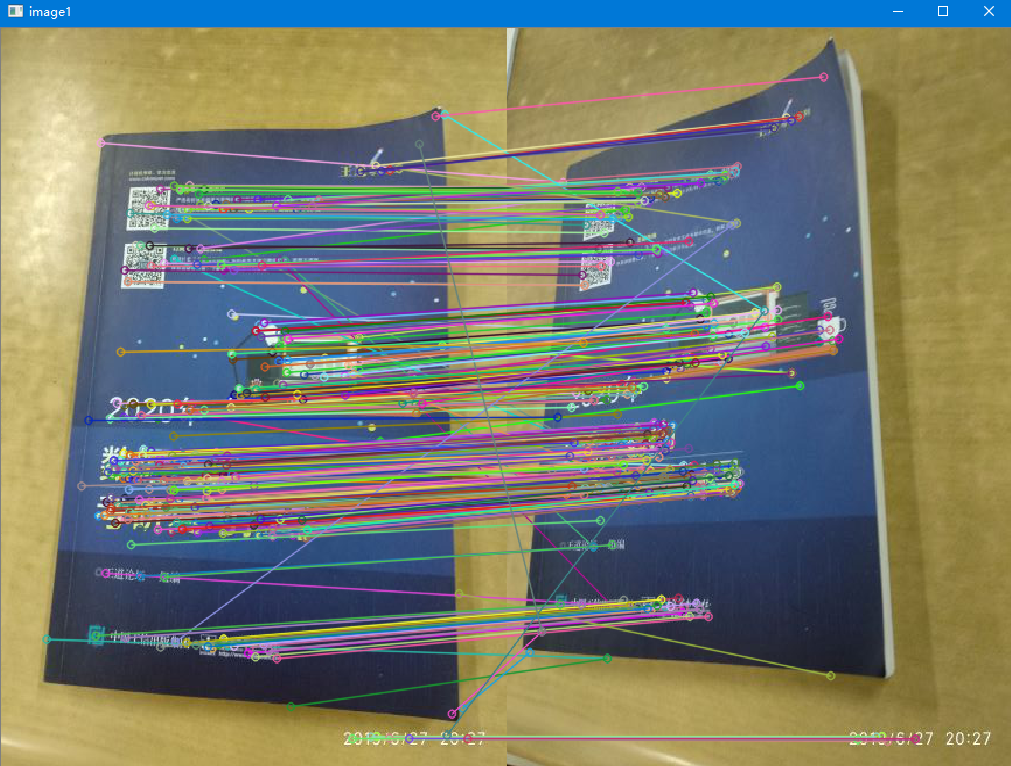
测试
sift特征提取匹配点,可以发现有很多错误的匹配点。
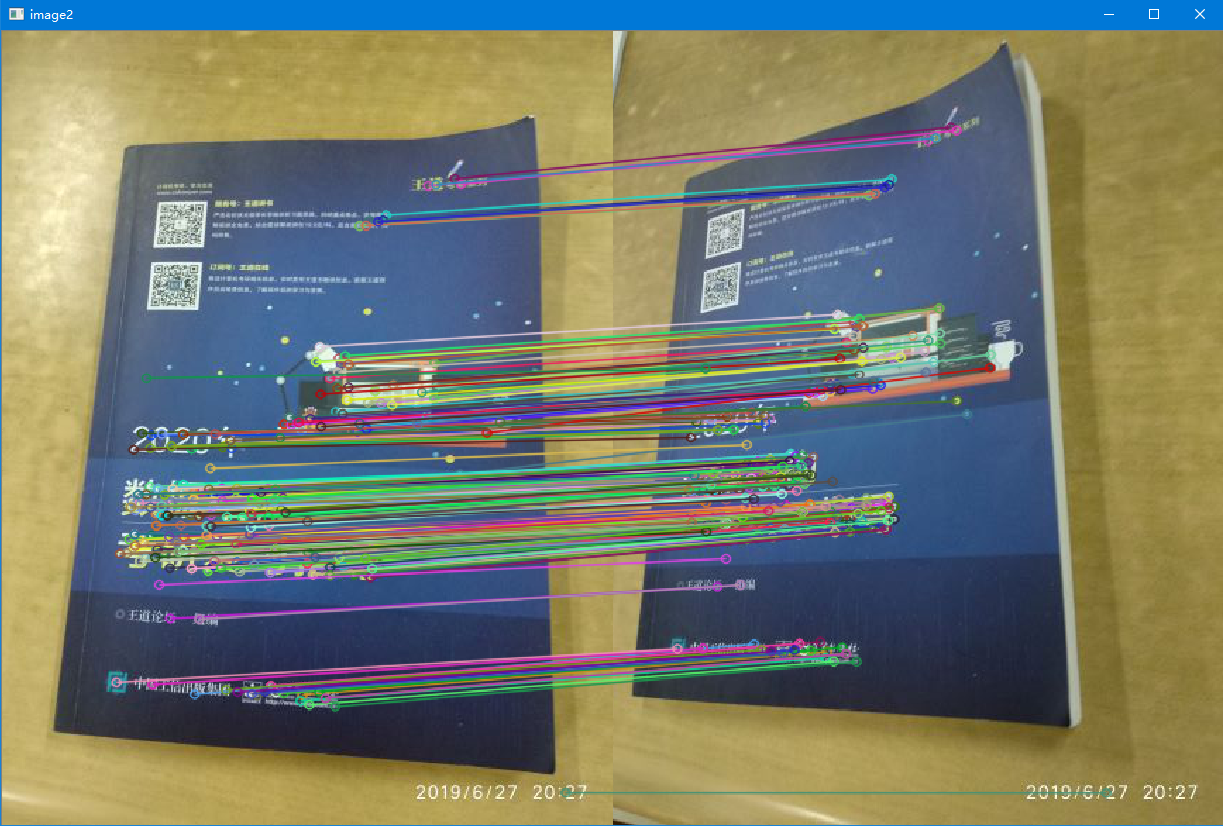
利用ransac算法剔除错误匹配点。
G i t h u b Github Github
完整代码见我的 G i t h u b Github Github地址:sunrise666。
最后
以上就是魁梧康乃馨最近收集整理的关于计算机视觉:RANSAC剔除基础矩阵F错误匹配(Python实现)原理代码现实的全部内容,更多相关计算机视觉内容请搜索靠谱客的其他文章。








发表评论 取消回复