SURF特征点检测与匹配之误匹配点删除
SURF(SpeededUp Robust Feature)是加速版的具有鲁棒性的算法,是SIFT算法的加速版。
但是SURF特征匹配之后有大量的误匹配点,需要对这些误匹配点进行删除。
这里不从理论上讲解SURF原理等,直接说用法。
特征匹配的步骤分为三步:
1、找出特征点
2、描述特征点
3、特征点匹配
具体基本代码见最后。具体的可以看毛星云的书籍,但是个人认为其编程风格不严谨,自己有做改动。
但是匹配出来的结果如下:
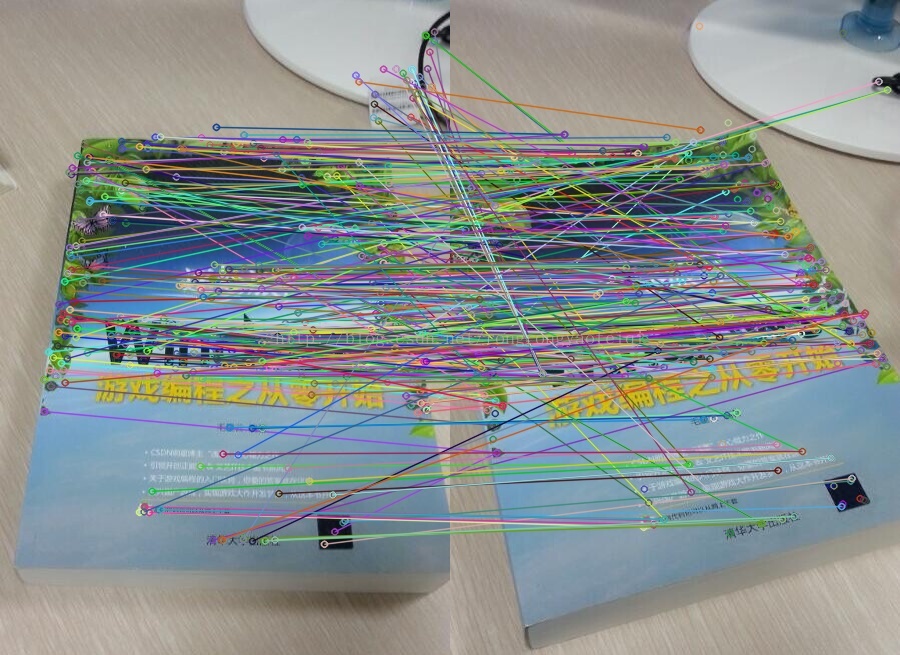
有很多的误匹配点,如何对误匹配点进行删除呢。
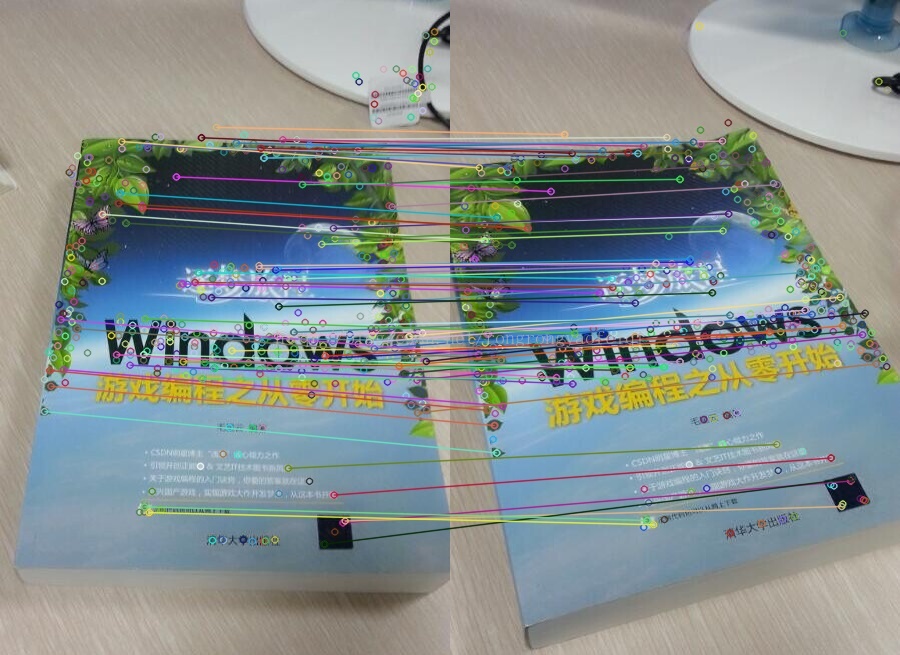
双向匹配加距离约束。
实验结果如下:效果还是非常好的。
#include "stdafx.h"
#include <opencv2opencv.hpp>
#include <opencv2nonfreenonfree.hpp>
#include <opencv2legacylegacy.hpp>
#include <iostream>
int _tmain(int argc, _TCHAR* argv[])
{
//读取图片
cv::Mat srcImg1 = cv::imread("1.jpg", 1);
cv::Mat srcImg2 = cv::imread("2.jpg", 1);
if (srcImg1.empty() || srcImg2.empty())
{
std::cout << "Read Image ERROR!" << std::endl;
return 0;
}
//SURF算子特征点检测
int minHessian = 700;
cv::SurfFeatureDetector detector(minHessian);//定义特征点类对象
std::vector<cv::KeyPoint> keyPoint1, keyPoint2;//存放动态数组,也就是特征点
detector.detect(srcImg1, keyPoint1);
detector.detect(srcImg2, keyPoint2);
//特征向量
cv::SurfDescriptorExtractor extrator;//定义描述类对象
cv::Mat descriptor1, descriptor2;//描述对象
extrator.compute(srcImg1, keyPoint1, descriptor1);
extrator.compute(srcImg2, keyPoint2, descriptor2);
//BruteForce暴力匹配
cv::BruteForceMatcher <cv::L2<float>>matcher;//匹配器
std::vector <cv::DMatch> matches;
matcher12.match(descriptor1, descriptor2, matches);
//绘制关键点
cv::Mat imgMatch;
cv::drawMatches(srcImg1, keyPoint1, srcImg2, keyPoint2, matches, imgMatch);
cv::namedWindow("匹配图", CV_WINDOW_AUTOSIZE);
cv::imshow("匹配图", imgMatch);
cv::imwrite("匹配图.jpg", imgMatch);
cv::waitKey(10);
return 0;
}最后
以上就是清新爆米花最近收集整理的关于SURF特征点检测与匹配之误匹配点删除的全部内容,更多相关SURF特征点检测与匹配之误匹配点删除内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复