残差Jacobian的推导
视觉重投影残差的Jacobian
视觉残差为:
对于第i帧中的特征点,它投影到第j帧相机坐标系下的值为:
拆成三维坐标形式为:
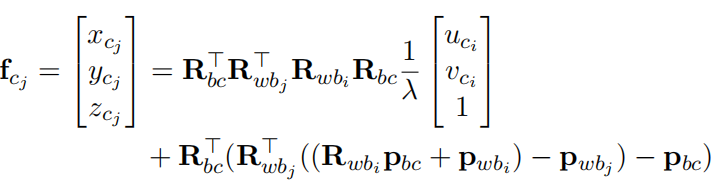
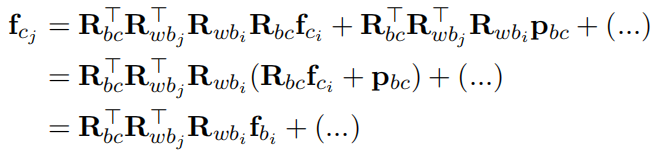
将齐次坐标拆为R(旋转)和P(位姿)
为了简化公式,先定义如下变量:
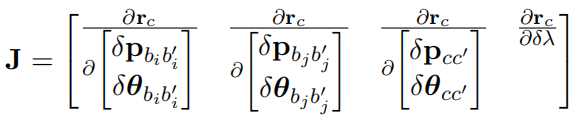
Jacobian为视觉误差对两个时刻的状态量,外参以及逆深度求导:
根据链式法则,Jacobian的计算可以分成两步走,第一步误差对求导
rc的每一列 对 fcj的每一行进行求导,得到2X3矩阵
第二步对对各状态量求导:
1. 对i时刻的状态量求导
a.对i时刻位移求导,可直接写出如下:
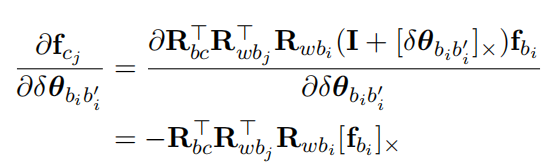
b.对i时刻角度增量求导

上面公式和i时刻角度相关的量并不多,下面为了简化,直接丢弃了不相关的部分
Jacobian为
2.对j时刻的状态量求导
a. 对位移求导:
b.对角度增量求导,同上面的操作,也简化一下公式

Jacobian为:
3. 对imu和相机之间的外参求导
a.对位移求导:
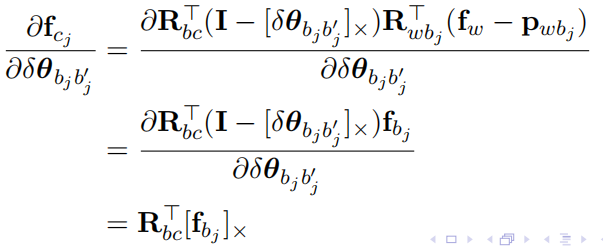
b. 对角度增量求导,由于fcj都和Rbc有关,并且比较复杂,所以这次分两部分求导

第一部分Jacobian为

分子可写成:

所以可以得到:

第二部分Jacobian为

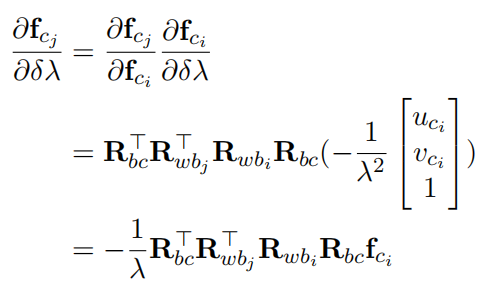
4.视觉误差对特征逆深度的求导
IMU预积分残差的雅克比
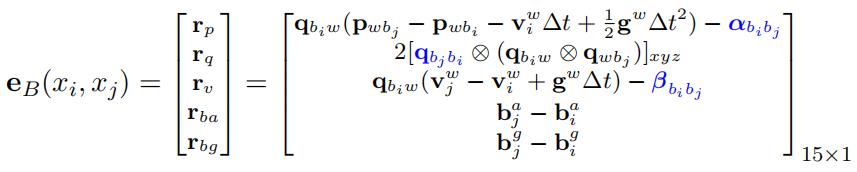
IMU误差相对于优化变量的Jacobian
在求解非线性方程时,需要知道误差eB对两个关键帧i,j的状态量p,q,v,的Jacobian
其中对i时刻的求导就显得十分复杂,下面进行详细讨论
因为i时刻的bias相关的预积分计算是通过迭代一步一步累计递推的,可以算但是太复杂。所以对于预积分量直接在i时刻的bias附近用一阶泰勒展开来近似,而不用真的去迭代。
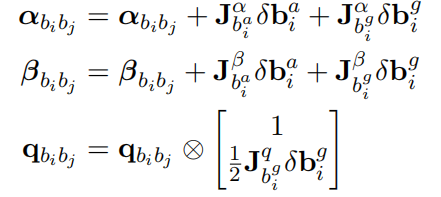
其中J表示预积分量对i时刻的bias求导,这些雅克比根据前面讨论的协方差传递公式,能一步步递推得到
下面讨论IMU误差相对于两帧的PVQ的Jacobian:
由于的误差形式很相近,对各状态量求导的Jacobian形式也很相似,所以这里只对rv的推导进行详细介绍
(1)对i时刻位移Jacobian:
(2)对i时刻旋转Jacobian
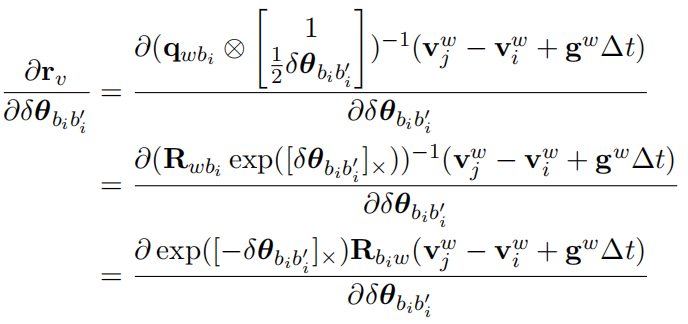
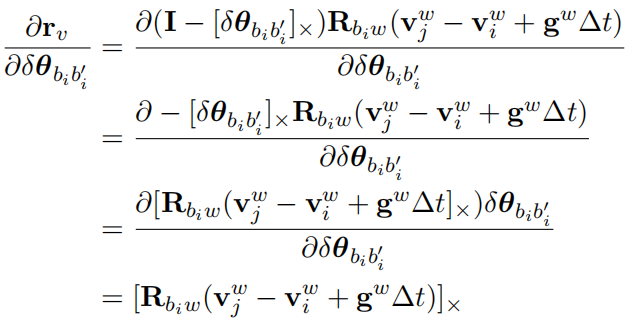
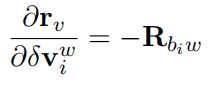
(3)对i时刻速度Jacobian:
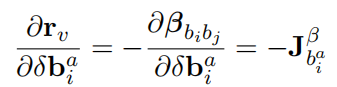
(4)对i时刻的加速度bias的Jacobian,注意bias量只和预积分β有关
IMU角度误差相对优化变量的Jacobian
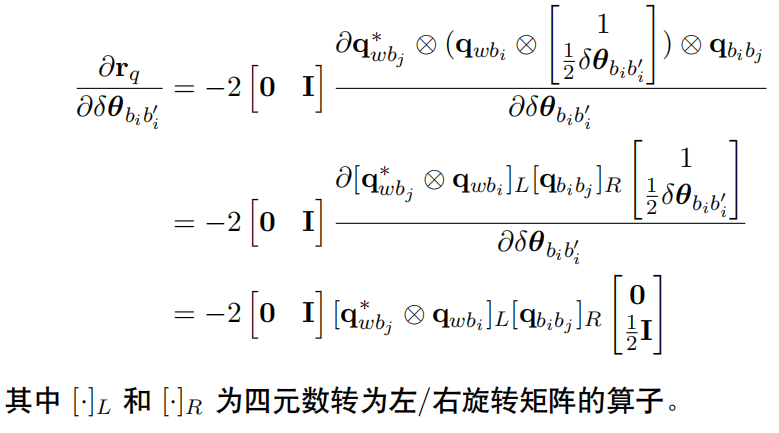
(1)对i时刻姿态求导
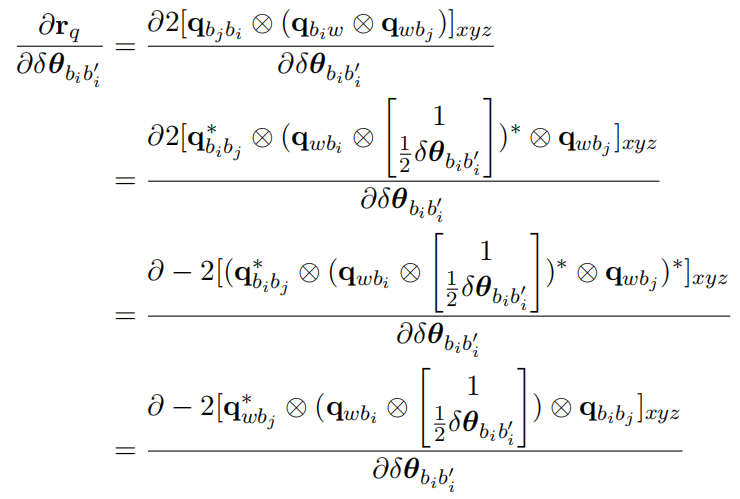
上式可化简为:
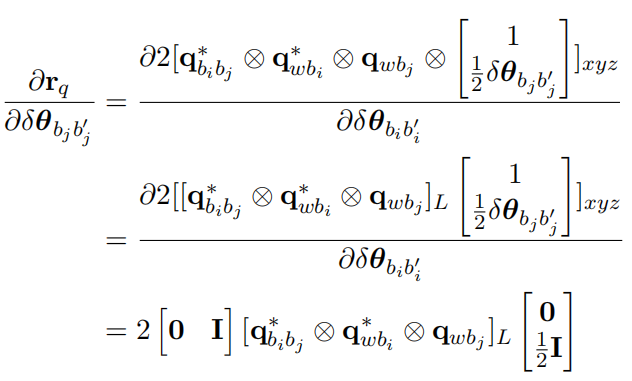
(2)角度误差对j时刻姿态求导
(3)角度误差对i时刻陀螺仪偏置
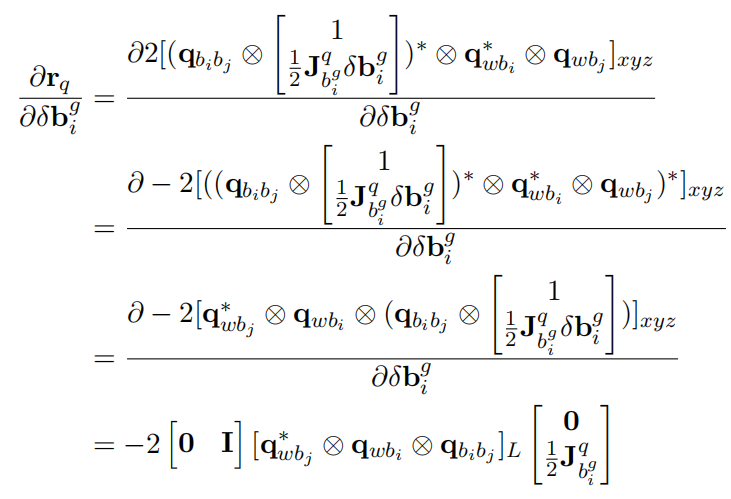
最后
以上就是羞涩跳跳糖最近收集整理的关于残差Jacobian的推导—手写VIO课程笔记3残差Jacobian的推导的全部内容,更多相关残差Jacobian内容请搜索靠谱客的其他文章。








发表评论 取消回复