前言
前段时间因为各种杂事缠身,一直没时间自己玩玩。今天元旦,打算给自己放个假,所以就寻思着玩玩手边吃了几个月灰的树莓派。花了些时间自己写了点代码,实现了在树莓派端启动服务器,并实时将从连接到树莓派的摄像头读取的数据传输到服务器上,在客户端接收服务器的数据并实时显示图像。功能很简单,代码也很简陋,希望勿喷。
我并没有做完整图像处理的功能,本来打算放yolo上去进行实时目标检测,于是我试着在树莓派上跑了yolo,但是跑一个epoch进行预测花了将近40s,这个速度太感人了,让我完全打消了前面的年头。不过如果在配置稍微好点的服务器上还是可行的,但是对于树莓派也真的别期待有多好的效果了。
依赖库
树莓派(服务器端)
安装系统
关于树莓派的系统如何安装我就不做介绍了,网上很多,也很容易。下面直接给个链接,照着做就是了:
https://www.cnblogs.com/suzhengsheng/p/5044924.html
安装好官方的raspbian系统后,最好先更新一下(不是必须的):
sudo apt-get update
sudo apt-get upgrade安装opencv
通常安装opencv有两种方式:使用apt-get直接从软件源获取编译好的opencv,或是自己从官网下载源码编译后安装。我个人比较喜欢后者,通常在自己的电脑上都会自己取编译想要用的版本。但是在树莓派上编译着实比较麻烦,各种依赖库的问题,如果不想折腾的话建议还是使用前者的方法。
sudo apt-get install libopencv-dev
sudo apt-get install python-opencv安装PIL
PIL(python image library)是十分好用的一个可用于python的图像处理库,后面要用到它进行图像的压缩。
sudo apt-get install python-imaging其他
如果还碰到其他的库没有的情况,请自行使用pip安装。
客户端
我的客户端就是自己的笔记本,环境都是很早就配好的,因为经常用到opencv、numpy等库。考虑到有些人的电脑可能没有安装好,所以还是简要介绍一下。自己配开发环境是最基本的技能了。
numpy
太常用了,不过安装是不要用pip来,可能会报错,我通常是使用如下指令来安装:
sudo apt-get install python-numpyPIL
指令同树莓派。
sudo apt-get install python-imagingopencv
可以直接apt-get安装,不过不能指定版本;我个人喜欢用opencv3.0以上的,所以是从源码安装的。相关安装教程请问度娘,花些时间就能搞定。
其他
如果在后面运行程序时碰到了某些库没有,可以考虑用pip安装或是向前面一样使用sudo apt-get install python-(库的名字)。
程序实现
使用python在本地读取摄像头并实时显示
在进入正题之前,我们要先实现在本地读取摄像头,测试正常通过后再放到服务器上测试。
创建一个python脚本,名字为:local_camera.py,代码如下:
#coding=utf-8
import cv2
# 打开摄像头
capture = cv2.VideoCapture(0)
while True:
# 从摄像头读取一帧图像;如果读取失败,ret为False,如果成功,ret为true;frame存储了那一帧的数据。
ret, frame = capture.read()
# print(ret)
# 显示图像
cv2.imshow("camera", frame)
if cv2.waitKey(10) == 27:
break
cv2.destroyAllWindows()
capture.release()程序很简单,不多说了,运行通过后,再往下一步走。
数据源端
创建一个python脚本,名字为:src_camera,py,代码如下:
import cv2
import time
import socket
import Image
import StringIO
# 获取摄像头
cap = cv2.VideoCapture(0)
# 调整采集图像大小为640*480
cap.set(cv2.cv.CV_CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.cv.CV_CAP_PROP_FRAME_HEIGHT, 480)
# 这里的HOST对应树莓派的IP地址(自己输入ifconfig查),端口号自己随便定一个即可,但注意后面的程序中要保持统一
HOST, PORT = '192.168.0.113', 9999
# 连接服务器
sock =socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.connect((HOST, PORT))
while True:
# 获取一帧图像
ret, img = cap.read()
# 如果ret为false,表示没有获取到图像,退出循环
if ret is False:
print("can not get this frame")
continue
# 将opencv下的图像转换为PIL支持的格式
pi = Image.fromarray(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
buf = StringIO.StringIO()# 缓存对象
pi.save(buf, format='JPEG')# 将PIL下的图像压缩成jpeg格式,存入buf中
jpeg = buf.getvalue()# 从buf中读出jpeg格式的图像
buf.close()
transfer = jpeg.replace('n', '-n')# 替换n为-n,因为后面传输时,终止的地方会加上n,可以便于区分
print len(transfer), transfer[-1]
sock.sendall(transfer + "n")# 通过socket传到服务器
# time.sleep(0.2)
sock.close()
这部分代码实现的功能是:在树莓派端读取摄像头,使用socket包连接到服务器,并将从摄像头读取的数据发送到服务器上。
注释都在程序中。程序中我们使用socket包来将数据传到服务器,为了减少数据量,所以我们还需要对原始图像进行压缩。而压缩则是通过PIL将图像压缩成jpeg格式,而PIL支持的图像格式与opencv不同,所以在程序中还对其进行了转换。
服务器端
创建一个python脚本,名字为:server_camera,py,代码如下:
import socket
import time
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.bind(("192.168.0.113", 9999))# 注意bind的这里,IP地址和端口号都要与前面的程序中一样
sock.listen(2)# 监听端口
# 等待数据源端连接
src, src_addr = sock.accept()
print "Source Connected by", src_addr
# 等待目标端连接
dst, dst_addr = sock.accept()
print "Destination Connected by", dst_addr
while True:
msg = src.recv(1024 *1024)
if not msg:
break
try:
dst.sendall(msg)
except Exception as ex:
dst, dst_addr = sock.accept()
print "Destination Connected Again by", dst_addr
except KeyboardInterrupt:
print "Interrupted"
break
src.close()
dst.close()
sock.close()
这个服务器端可以说是很简陋了,整体流程是:监听端口–>等待数据端连接–>等待目标端连接–>从数据端接受数据,转发给目标端。
目标端(客户端)
创建一个python脚本,名字为:dst_camera,py,代码如下:
import cv2
import socket
import time
import Image
import StringIO
import numpy as np
# 注意IP地址和端口号与前面的程序中的保持一致
HOST, PORT = "192.168.0.113", 9999
# 连接到服务器
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.connect((HOST, PORT))
f = sock.makefile()
cv2.namedWindow("camera")
while True:
# 从服务器读取数据,一行的结尾是'n',注意我们前面已经将每一帧数据的'n'替换成'-n',而结尾就是'n'
msg = f.readline()
if not msg:
break
print len(msg), msg[-2]
# 将'-n'换回来成'n'
jpeg = msg.replace("-n", "n")
buf = StringIO.StringIO(jpeg[0:-1])# 缓存数据
buf.seek(0)
pi = Image.open(buf)# 使用PIL读取jpeg图像数据
# img = np.zeros((640, 480, 3), np.uint8)
img = cv2.cvtColor(np.asarray(pi), cv2.COLOR_RGB2BGR)# 从PIL的图像转成opencv支持的图像
buf.close()
cv2.imshow("camera", img)# 实时显示
if cv2.waitKey(10) == 27:
break
sock.close()
cv2.destroyAllWindows()
目标端,也可以说是客户端,这是真正的我们可以看到实际输出的部分了。从服务器读出数据然后显示即可。
运行结果
接下来看下运行结果了。
- 先运行服务器端的程序,输入
python server_camera.py; - 然后运行数据源端的程序,输入
python src_camera.py; - 最后在自己的客户端上运行程序,输入
python dst_camera.py;
结果截图:
数据源端和服务器端:
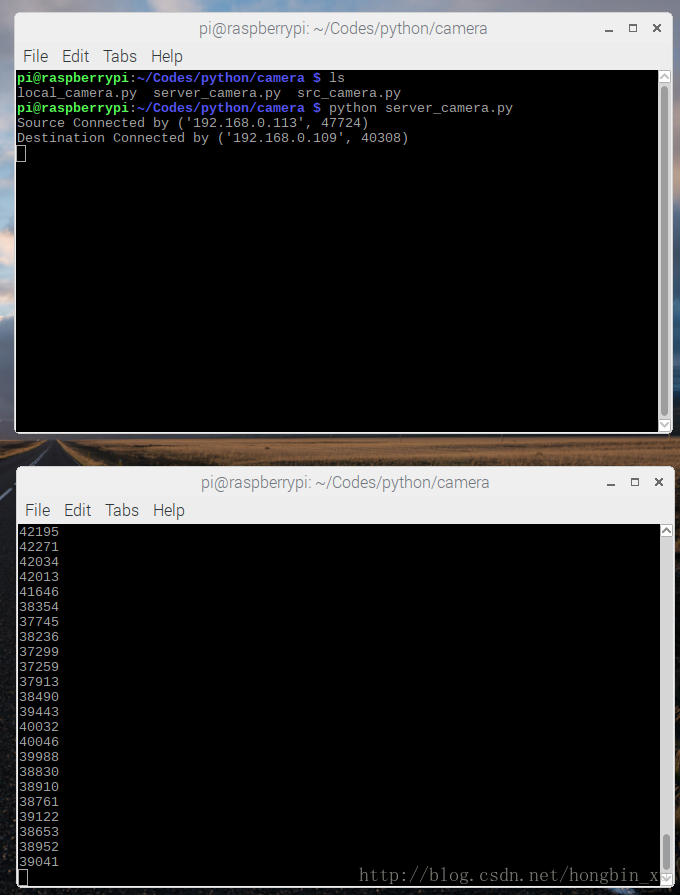
目标端:
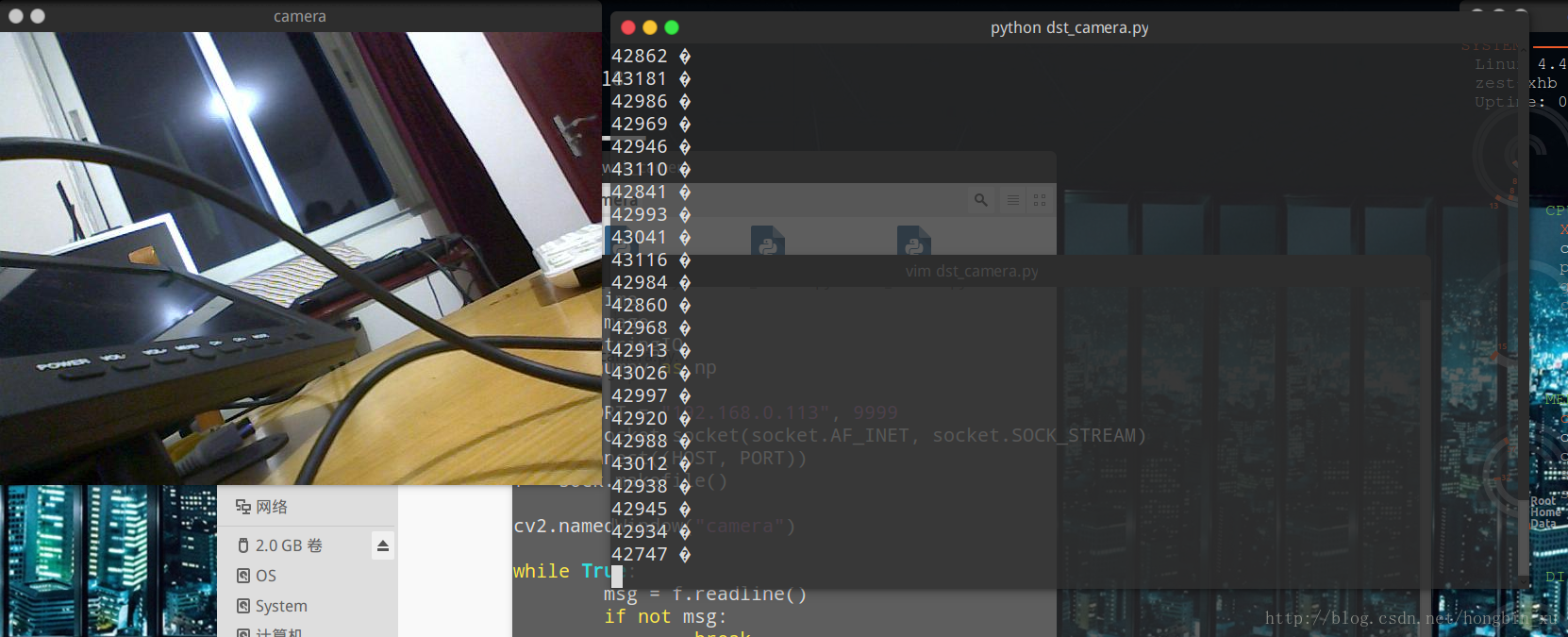
我看了下,实时显示的效果还行。如果你想要控制帧率,可以在src_camera.py中更改time.sleep(0.2)这句代码的参数,来控制延时时间。
可能遇到的错误
对号入座:
- HIGHGUI ERROR: V4L: index 0 is not correct!:http://blog.csdn.net/youhongaa/article/details/55054970
- socket.error:[errno 99] cannot assign requested address and namespace in python:https://stackoverflow.com/questions/19246103/socket-errorerrno-99-cannot-assign-requested-address-and-namespace-in-python
参考资料:
树莓派+python opencv实现远程监控:写的很不错,但是它用的是老版本的opencv,不保证一定能运行成功。
最后
以上就是无聊金毛最近收集整理的关于使用python和树莓派实现远程监控前言依赖库程序实现运行结果可能遇到的错误的全部内容,更多相关使用python和树莓派实现远程监控前言依赖库程序实现运行结果可能遇到内容请搜索靠谱客的其他文章。








发表评论 取消回复