本文翻译的外国学者的一份talk,主要内容是关于立体视觉算法和应用的基础知识。限于个人水平,如有疏漏之处请谅解。
大纲
1、介绍
2、立体视觉系统概述
3、视觉匹配算法
4、计算优化
5、硬件实现
6、应用
视差调整
通过匹配算法可以得出未加工的视差图,图中包含了一些outliners,这样的点是需要被识别出来并进行修正的。而且,因为视差图的计算基于离散的像素水平进行计算的,这使得视差的分配的可信度更高。另外本部分推荐了一些提升视差图的方法。
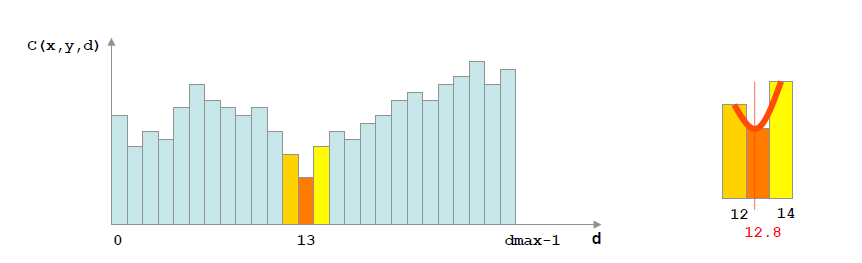
亚像素插值
典型的亚像素视差可以通过利用二次函数对three matching costs进行插值而获得。这种计算相对较简单而且精度也还可以。
图像滤波技术
有时视差图可以简单地使用不带约束的图像滤波技术来refine。常用的图像滤波技术有:中值滤波、形态学操作、双边滤波。
双边检测 (Bidirectional Matching)
Bidirectional Matching(BM)是一种常用来检测outliners的方法。将匹配问题分为两次,一次是从左图到右图,另一次从右图到左图,满足了对应点唯一性的约束。那么视差值在两幅图中的不一致可以作为将点分为outliners的依据,通常将式中的T设置为1。这种方法可以方便地检测到遮挡区域,抑制深度不连续的影响,有效地探测模糊区域的outliners。

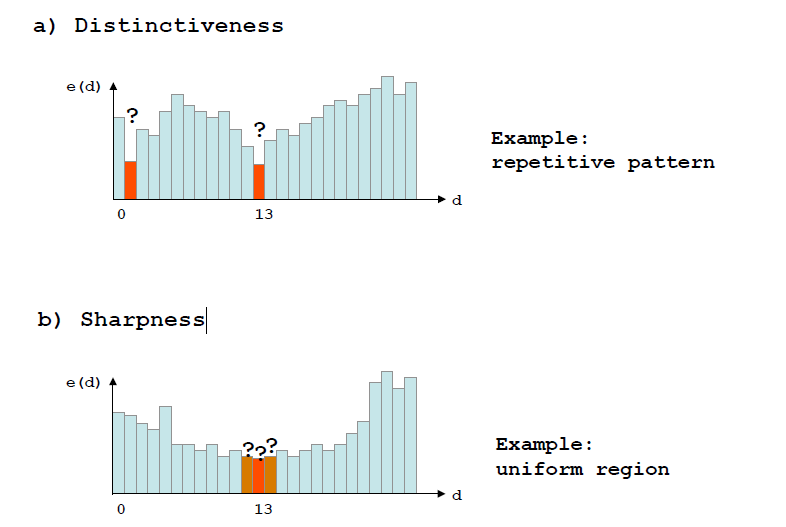
Single Matching Phase (SMP)
SMP算法旨在检测不可靠的视差分配,通过更有效的计算技术。运用单个匹配相(相当于一半的BM中的匹配过程);严格执行唯一性约束;当唯一性不满足时动态的更新视差图;通过其他约束增强算法;适合利用SIMD。其中的匹配运用单相的匹配动态的计算和更正,从参考图像到目标图像,选取匹配值最佳的为对应点,其余的候选点被丢弃。基本的SMP算法可以利用其他约束来增强,如Distinctiveness、Sharpness。
Segmentation based outliers identification and replacement
两个基本的假设:1)视差在各个分割区域是平滑的; 2)每一个分割区域近似一个平面(有可能过分分割)。那么每个分割区域均可以在三维中用一个三维平面来表示:

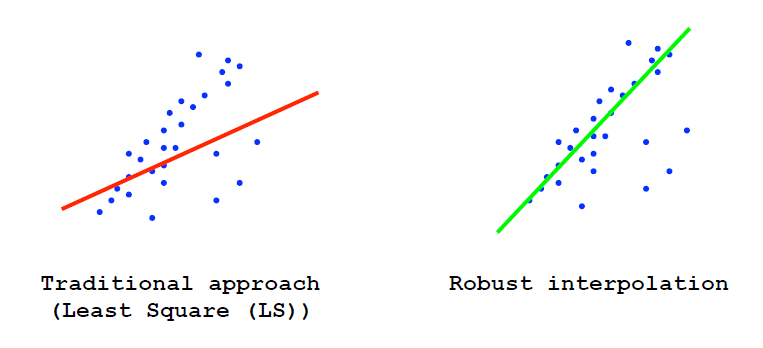
鲁棒的视差平面适应值测度:RANSAC、Histogram Voting。平面的适应值需要对outliners具有鲁棒性的插值技术。常用的插值技术是最小均方差插值,并不能排除干扰点的影响,而上述两种方法均有一定的鲁棒性。
也可以采用一些方法实现边界和遮挡区的精确定位来提高性能。
应用
3D tracking
SLAM
Autonomous robot navigation
Mobility aid for visually impaired
最后
以上就是隐形啤酒最近收集整理的关于立体视觉:算法和应用(七)的全部内容,更多相关立体视觉内容请搜索靠谱客的其他文章。








发表评论 取消回复