一. linux 下 qt的安装
参考 https://blog.csdn.net/lzp_k2/article/details/82662112
https://blog.csdn.net/hansion3333/article/details/60468590
最好安装qt5.8
https://www.ncnynl.com/archives/201701/1277.html
安装包 download.qt.io/archive/qt/
二、安装ros_qtc_plugin插件
官方教程:
https://ros-qtc-plugin.readthedocs.io/en/latest/_source/Improve-ROS-Qt-Creator-Plugin-Developers-ONLY.html
1、ubuntu 16.04 安装
sudo add-apt-repository ppa:levi-armstrong/qt-libraries-xenial
sudo add-apt-repository ppa:levi-armstrong/ppa
sudo apt-get update && sudo apt-get install qt57creator-plugin-ros libqtermwidget57-0-dev
2、如果报以下错误
下列软件包有未满足的依赖关系:
qt57creator-plugin-ros : 依赖: libqtermwidget57-0 (>= 0.6.1) 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
sudo apt-get install libqtermwidget57-0
下列软件包有未满足的依赖关系:
qt57creator-plugin-ros : 依赖: libqtermwidget59-0 (>= 0.6.1) 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
sudo apt-get install qt57creator-plugin-ros
三、配置 ros下的qt环境
1、新建qt工作空间及程序包
https://www.cnblogs.com/hgl0417/p/6235616.html
- 生成新的程序包后 在目录栏没有显示 程序包的 src和include目录(实际上已经存在),新建节点cpp目录选择到程序包下的src目录中。
- build默认不用配置

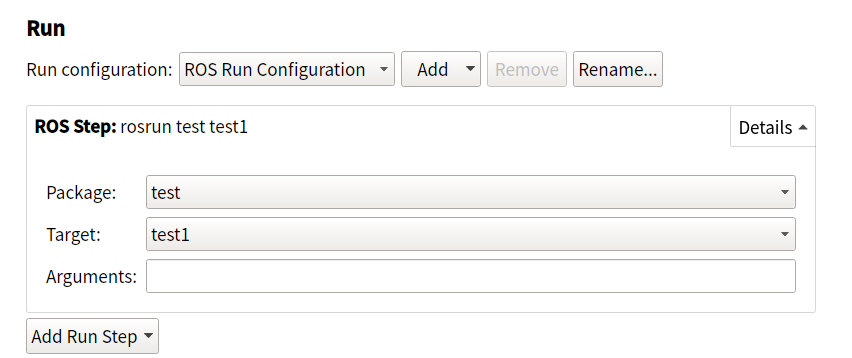
- RUN配置
在terminal中显示,RUN的配置
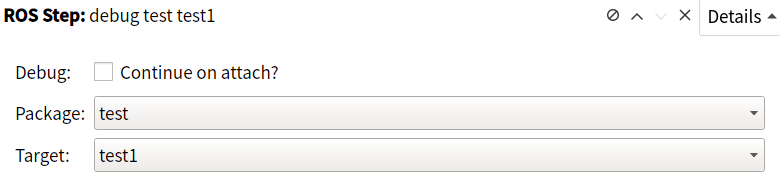
debug模式,RUN的配置
- 在qt最下方上下箭头处添加 ROS Terminals

2、qt打开工作空间或者工程
用qt打开工作空间 须要 .workspace 文件 (会打开工作空间中所有文件)
用qt打开单个工程 须要 .pro文件
打开单个工程也借助工作空间,打开工作空间,单个工程为程序包。
3、工程中没有 .workspace 或 .pro 文件
在工程文件目录下生成.pro 文件:工程根目录下
qmake -project五、ros qt debug
https://www.cnblogs.com/mercedes-Benz/p/6138399.html?utm_source=itdadao&utm_medium=referral
六、GUI
https://blog.csdn.net/runner668/article/details/80510176
最后
以上就是大气绿茶最近收集整理的关于Qt安装及配置环境的全部内容,更多相关Qt安装及配置环境内容请搜索靠谱客的其他文章。








发表评论 取消回复